 John Opsahl
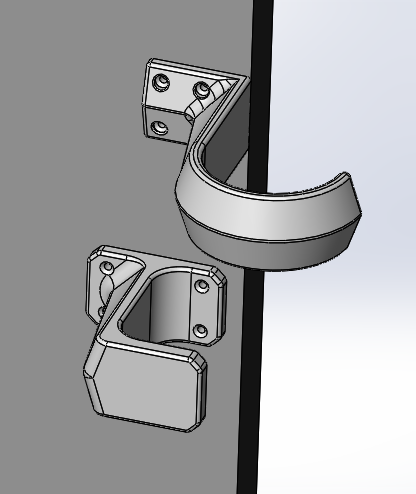
John OpsahlThe previous forearm pull design I developed was a 3D printable version of a commercially available product. The custom forearm door pull detailed in this post in my own design. It is mounted at the edge of the door and allows the user to pull the door open with their forearm in a more natural motion. The previous forearm door pull (bottom hook in image below) is mounted away from the edge of the door. It requires that the user stand outside the path of the door and quickly pull their arm from the hook near the end of the door pull motion. If the user doesn't pull their arm from the door quick enough, their hand and forearm may hit the face or side surface of the door. If their hand hits the door, it's no longer an effective hands-free door pull design! Instead, the forearm door pull that I have devised (top hook in image below) will swing away from the user's forearm with the natural motion of the door. One downside of this new design is that it has potential catch a user's arm or clothing when entering from the "push" side of the door or closing from the "pull" is of the door. I will address these challenges in the next revision of this design.
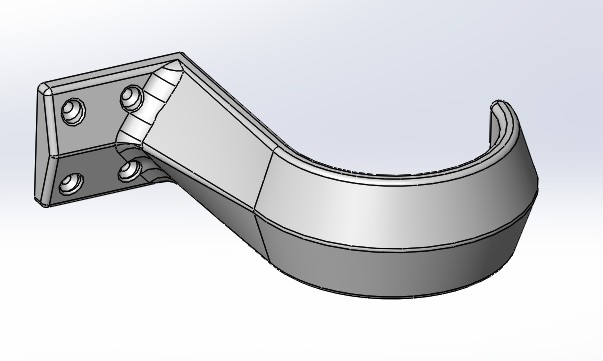
I use a triangular profile along the crossection of the hook to add stiffness and still allow the part to be 3D printed without support material.
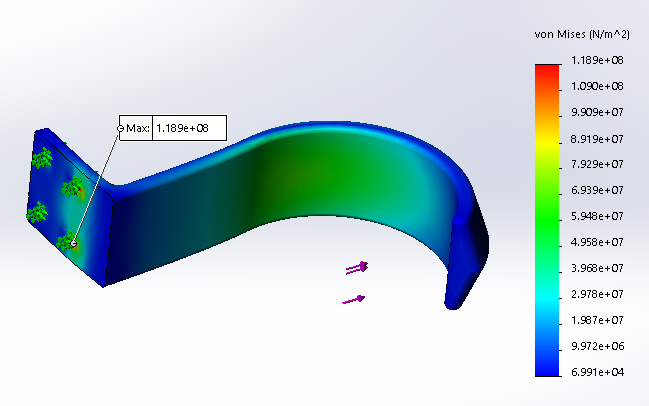
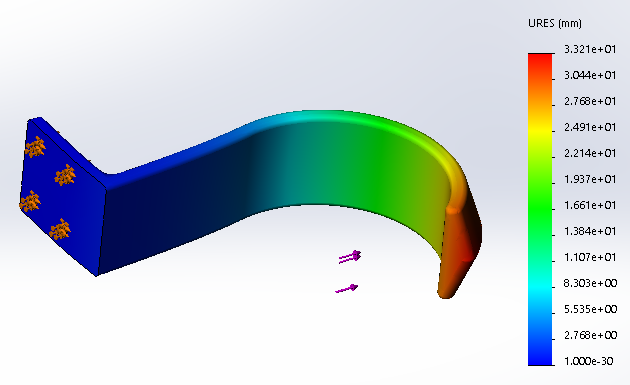
A quick deformation and stress check shows that highest stress occurs where the hook connects to the base (so I increased the fillet radius there) and deformation is less than 4mm. I used a 900N (200lb) force at the tip of the hook.
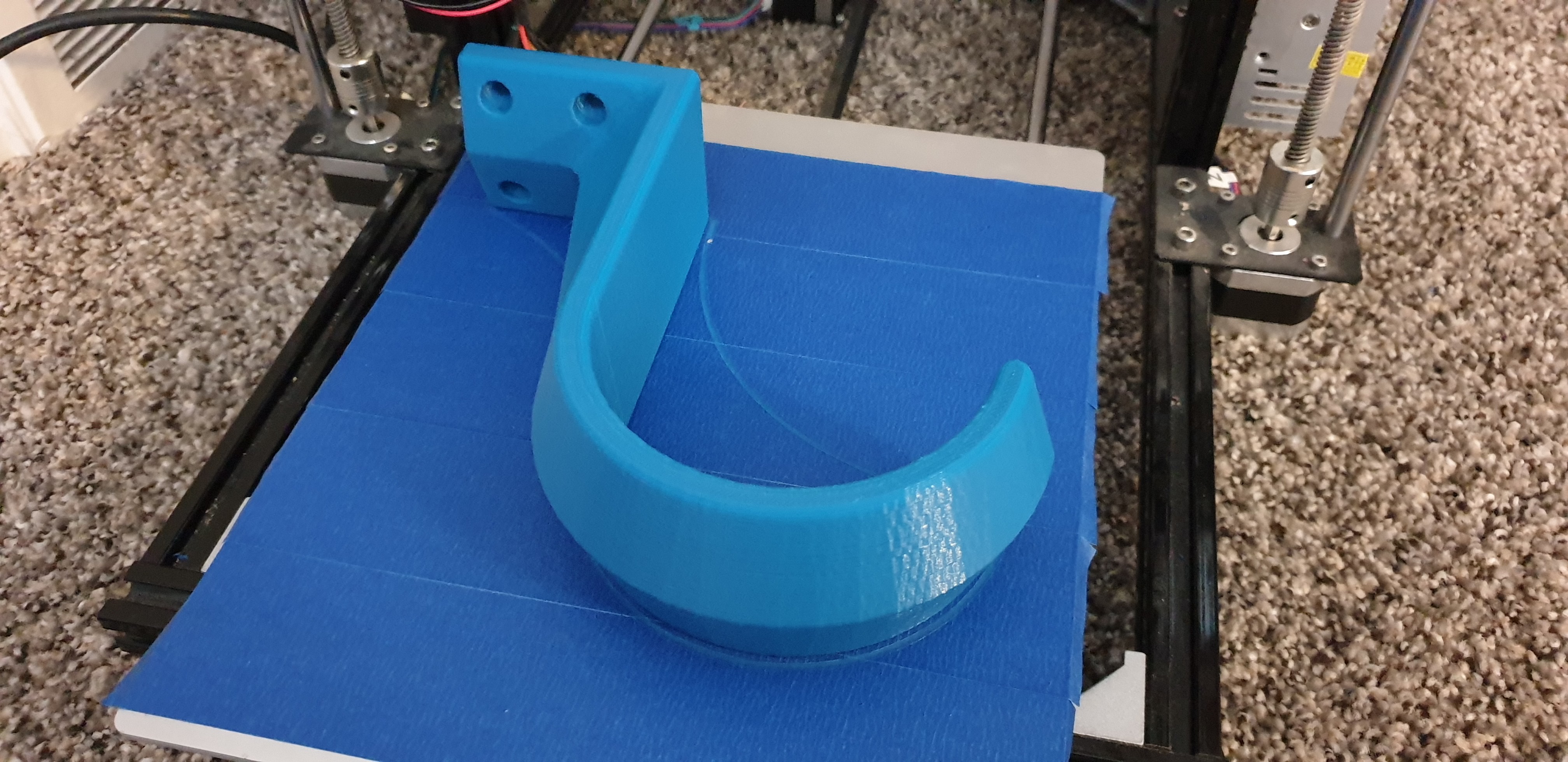
It print in six hours and fifteen minutes at 30% infill and 0.8mm wall thickness. It deflects a little when I hold the base and pull on the tip of the hook, but overall I think it is strong enough for the application.
I am happy with this build. Writing this log has got me excited about some changes I am going to make to the next revision.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.