 Rohan Menon
Rohan MenonBackground
Water bodies are crucial components of almost all ecosystems and many human activities. Today, the USGS maintains the largest collection of water sensing devices. They have about 10,000 sensing devices across the nation. Unfortunately, this does not cover millions of American homes susceptible to flooding from nearby streams and rivers or the ocean. Additionally, these sensing stations are designed for accuracy. This means that installing one has a high cost of infrastructure and can cost thousands of dollars.

Water data does not have to be limited to level and flow rates. Many residential drinking supplies come from water that originates as runoff. Impurities like road salt and fertilizer can sometimes find their way into these drinking supplies. By monitoring temperature and conductivity in these streams, you can help predict ecological events like algal blooms. And, if the network of sensors is large enough, you can pinpoint the origin of the impurities.
As climate change makes super storms and mass flood events increasingly common, water resources are becoming harder and harder to predict. The remedy is more data and analysis to provide real-time insights about water bodies. A network of low-cost and easy to install sensors would help fill the gaps in our understanding about how water bodies interact while also providing real-time alerts to flood-prone homes.
Solution
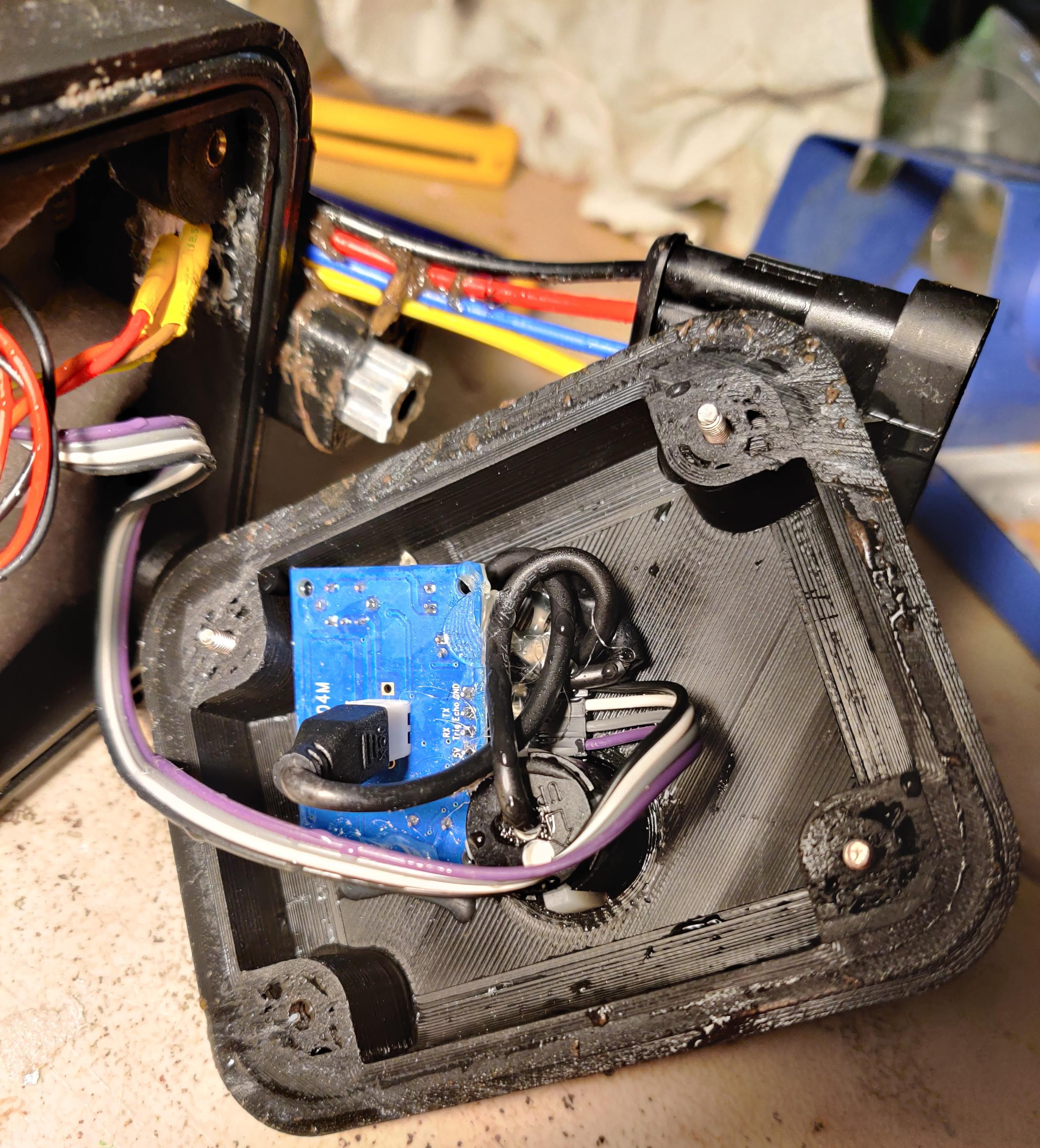
Hardware
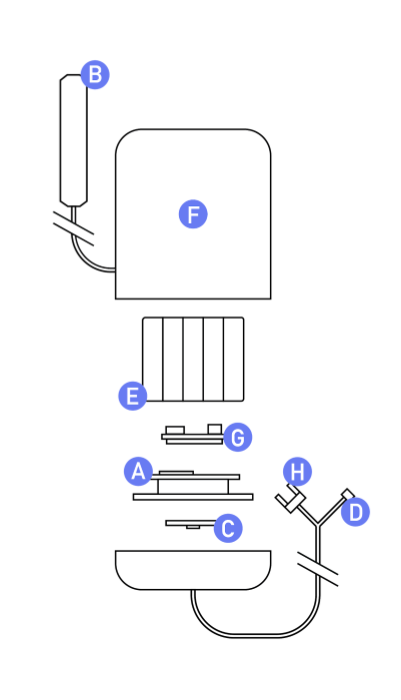
(A) A Particle Electron microcontroller is responsible for coordinating all the sensors present on the device and using a cellular data connection to transmit this to the central server.
(B) A 3G antenna is mounted internally away from other electronics to improve reliability.
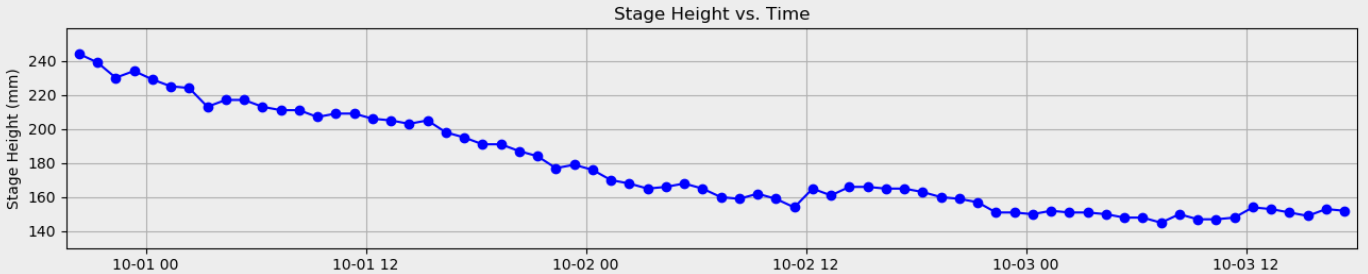
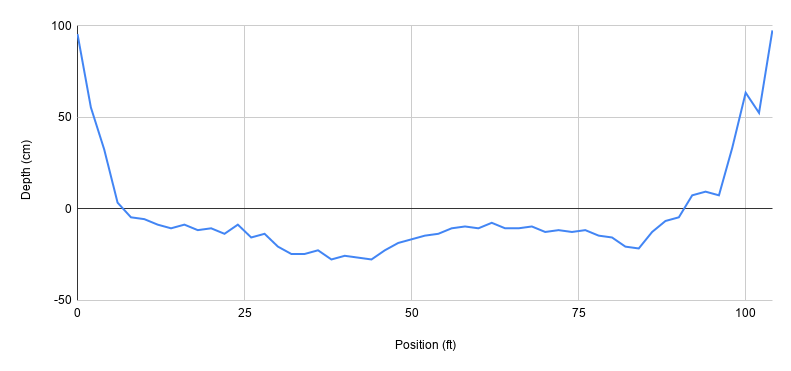
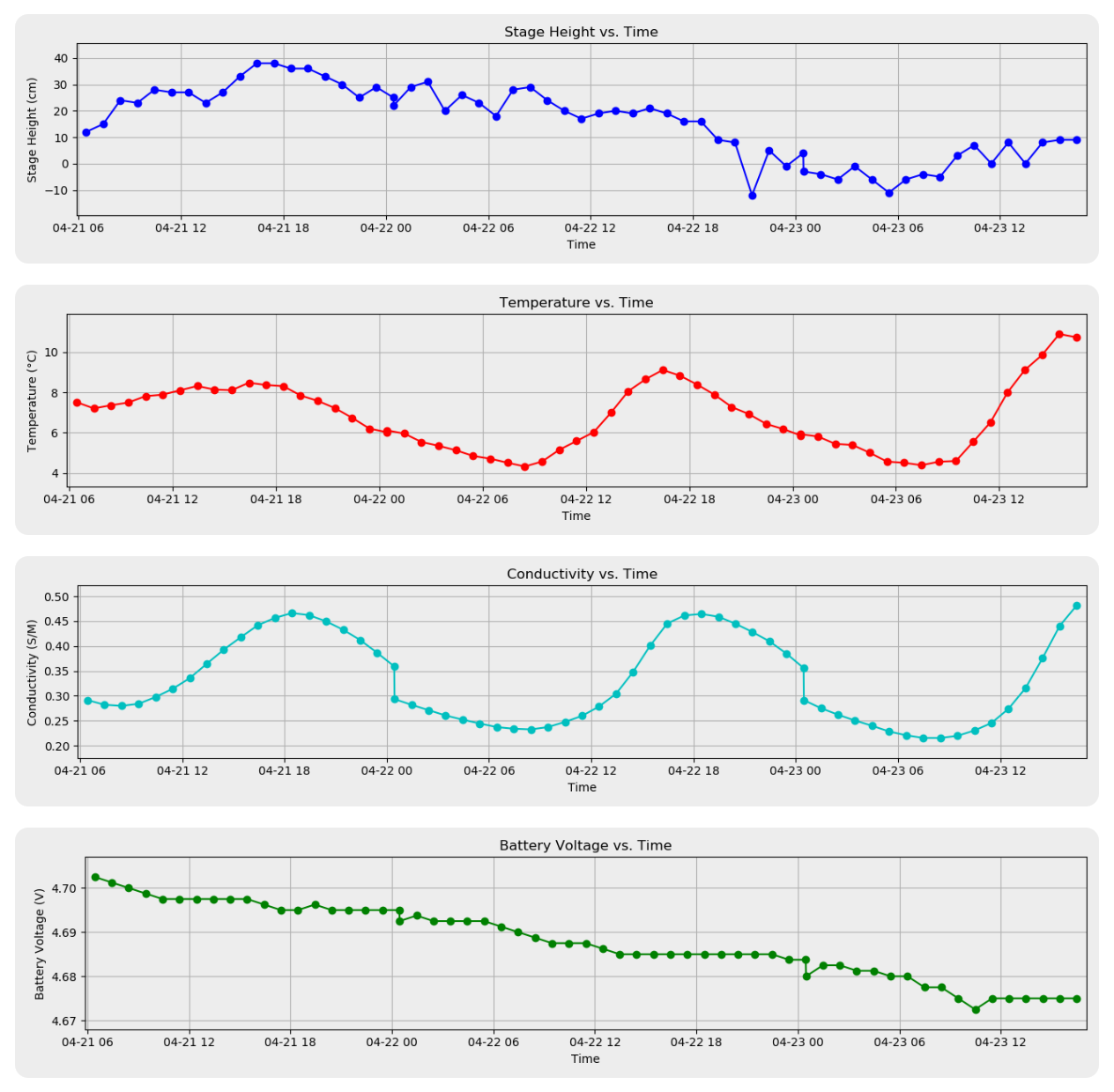
(C) An ultrasonic distance sensor faces the surface of the water measuring fluctuations in the height of water flowing through the stream or river. The raw sensor data can then be used as a measure of relative flow rate.
(D) A thermistor mounted under the surface of the water measures the temperature of water flowing through the stream or river.
(E) AA batteries were chosen as the device’s power source for their high energy capacity, low leakage current, and resilience to extreme temperature. Cells are wired in series in sets of 3. This comes out to 4.5V with 15 total cells.
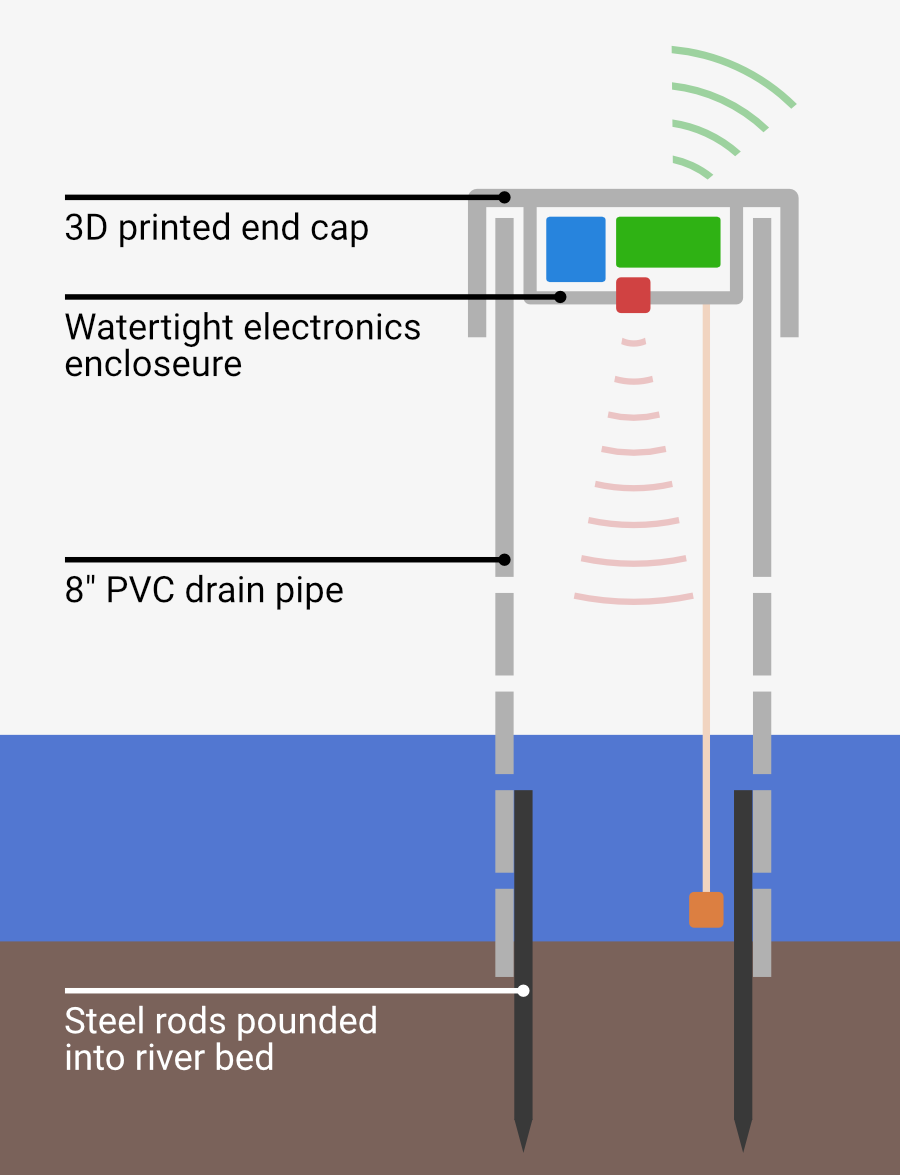
(F) An ABS enclosure is waterproof and designed to be easy to install at the field.
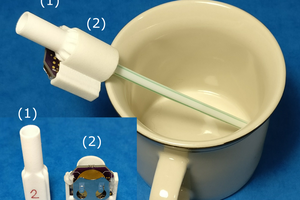
(H) Conductivity is measured by passing a small current through two aluminum plates. When placed under the water, it can monitor relative conductivity.
Bill of Materials
Item | Price |
ABS Enclosure | $10.00 |
Particle Electron 3G | $70.00 |
Ultrasonic Distance Sensor | $5.00 |
AA Batteries x 15 | $5.50 |
Thermistor | $2.00 |
Passives, wire, hardware | $5.00 |
| 3.3V to 5V boost converter | $2.00 |
| Waterproof Button | $5.00 |
| Waterproof RJ45 Panel Mount | $10.00 |
Total | $114.50 |
Software
The software powering the project consists of two main components: the embedded software running on the actual sensor, and the software powering the web server which receives and stores the data from the sensor and provides historical data to users.
The embedded software is designed to consume as little power as possible to extend battery life. The Particle Electron stays in a deep sleep state in between readings which are taken each hour. When the Particle wakes, it takes sensor readings at the same time that it attempts to connect to cellular data. This is so that when it does eventually establish a connection, it can immediately publish the data and return to a sleep state. The device has a software watchdog running as well. If the sensor is on for more than 5 minutes without connecting, it returns to sleep and tries again later.
The web server serves two main functions: to receive data from the individual sensor units, and to make this data available to users. To submit data to the server, a sensor unit submits an HTTP POST request consisting of a JSON string which contains the current...
Read more »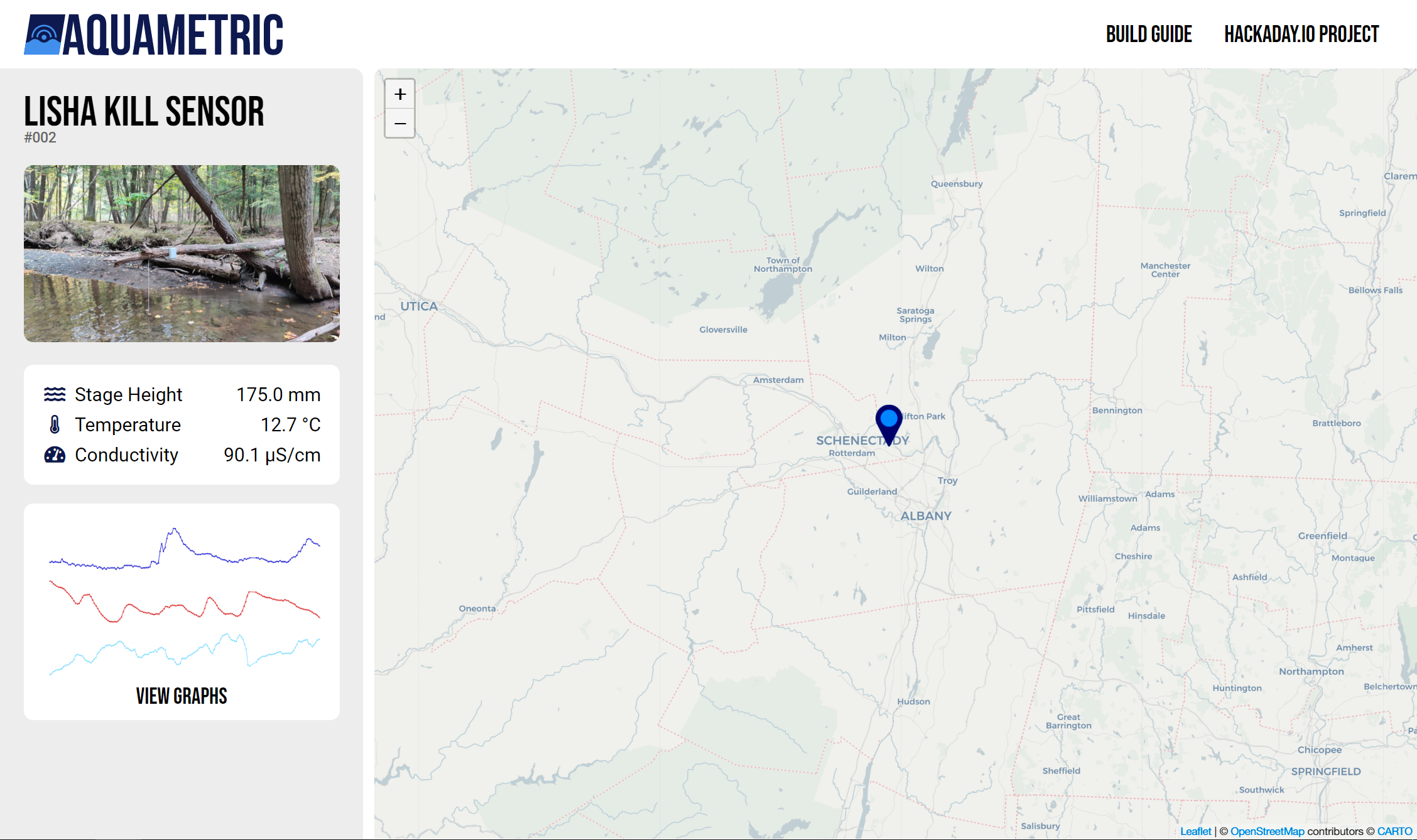











 jflaschberger
jflaschberger

 Andrew Lamchenko
Andrew Lamchenko
I wonder if you can use the 3G modem to get relative location off the tower(s) it is connecting to. Then have it phone home its relative location and sound a big old piezo buzzer.