 Ameer
Ameer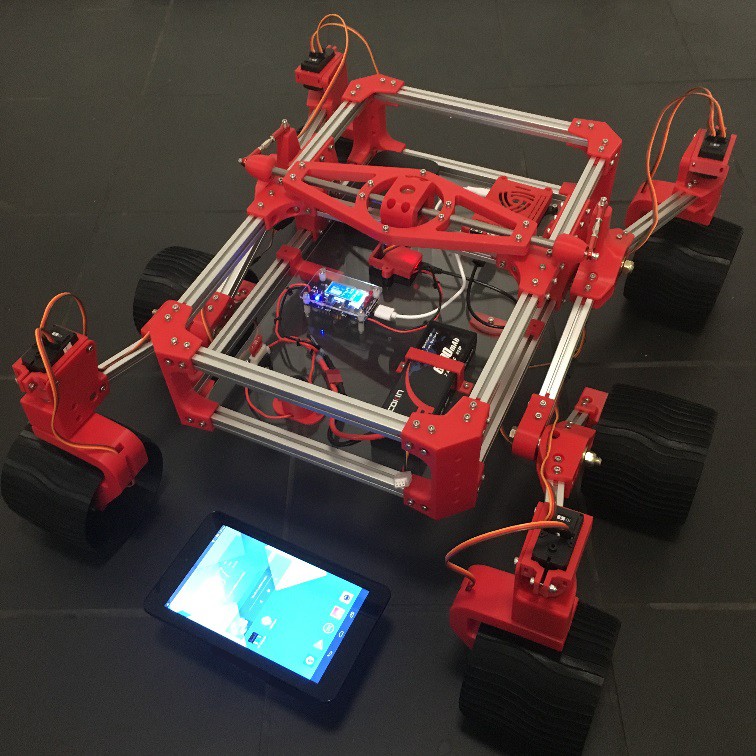
Rover-X is based on the schematics of the Sawppy Rover https://hackaday.io/project/158208-sawppy-the-rover by Roger (Thank you). A smaller Replica that is true in proportions to the Curiosity rover. ROVER-X will be used at a School Assembly Program to engage students in STEM related activities in Planetary Science featuring the mechanisms of all 4 rovers NASA sent to Mars.
-
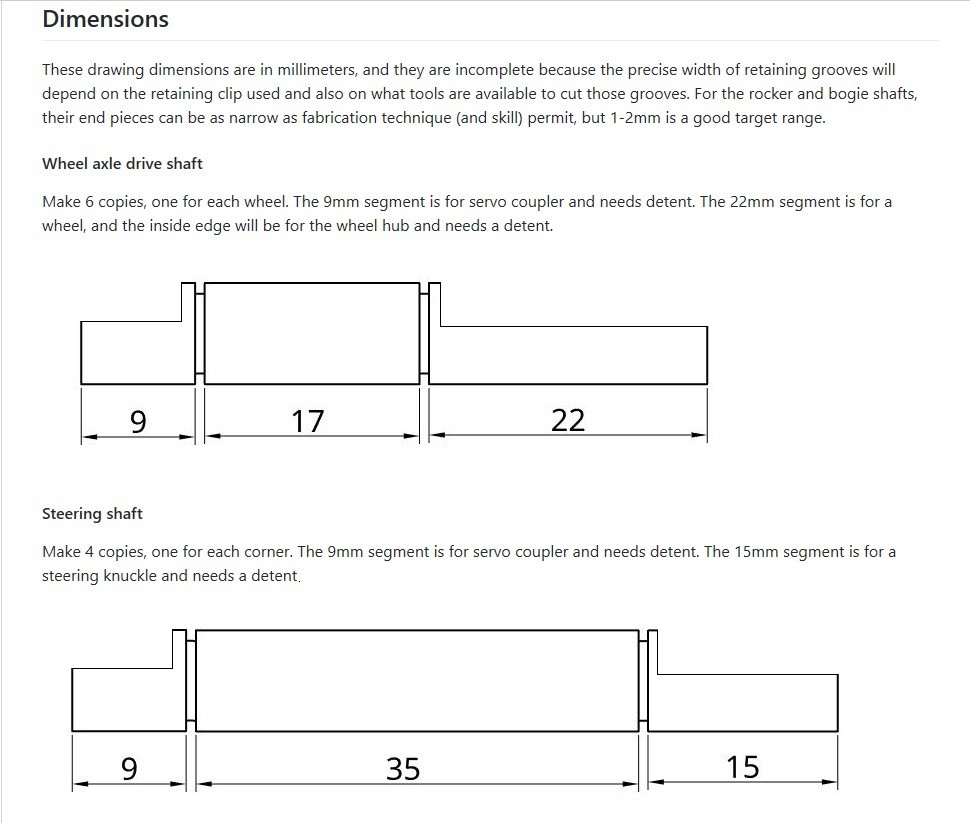
I built this rover in the late spring/early summer of 2020, so I had an advantage of seeing what others have done, and I tried to put together the best parts I can get my hands on and tried to do the least amount of fabrication possible (The only parts I had to fabricate were the 10 steel shafts attached to the servo motors, and those were shaved a little different than the ones on Sawppy 1.0). The total cost of all parts ended up being $600.
-
Regarding the Files: They are the 7 .stl files of the 3D Printed Parts I used on my rover that are different than those on the Sawppy 1.0.
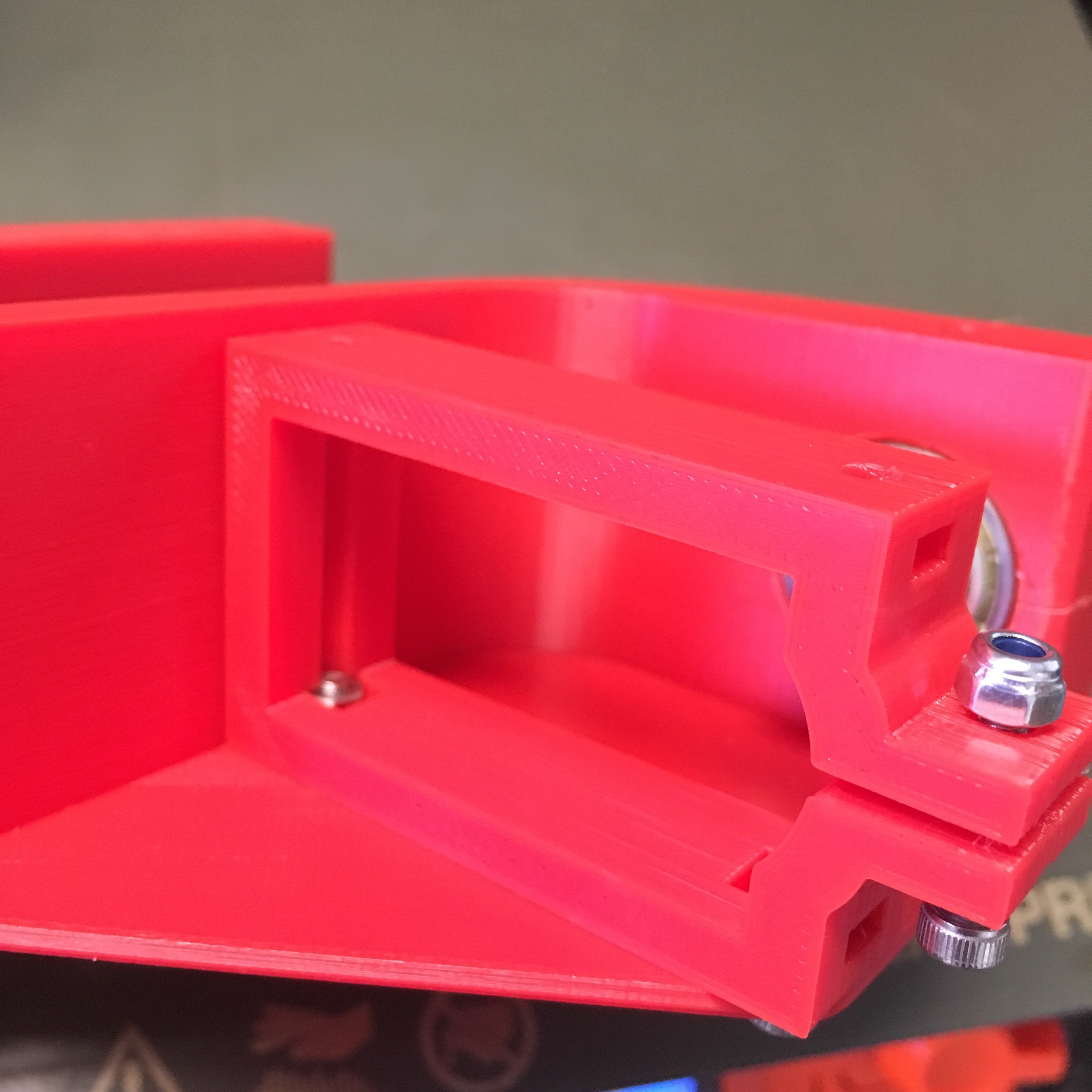
1 Designed from scratch: Servo Brackets
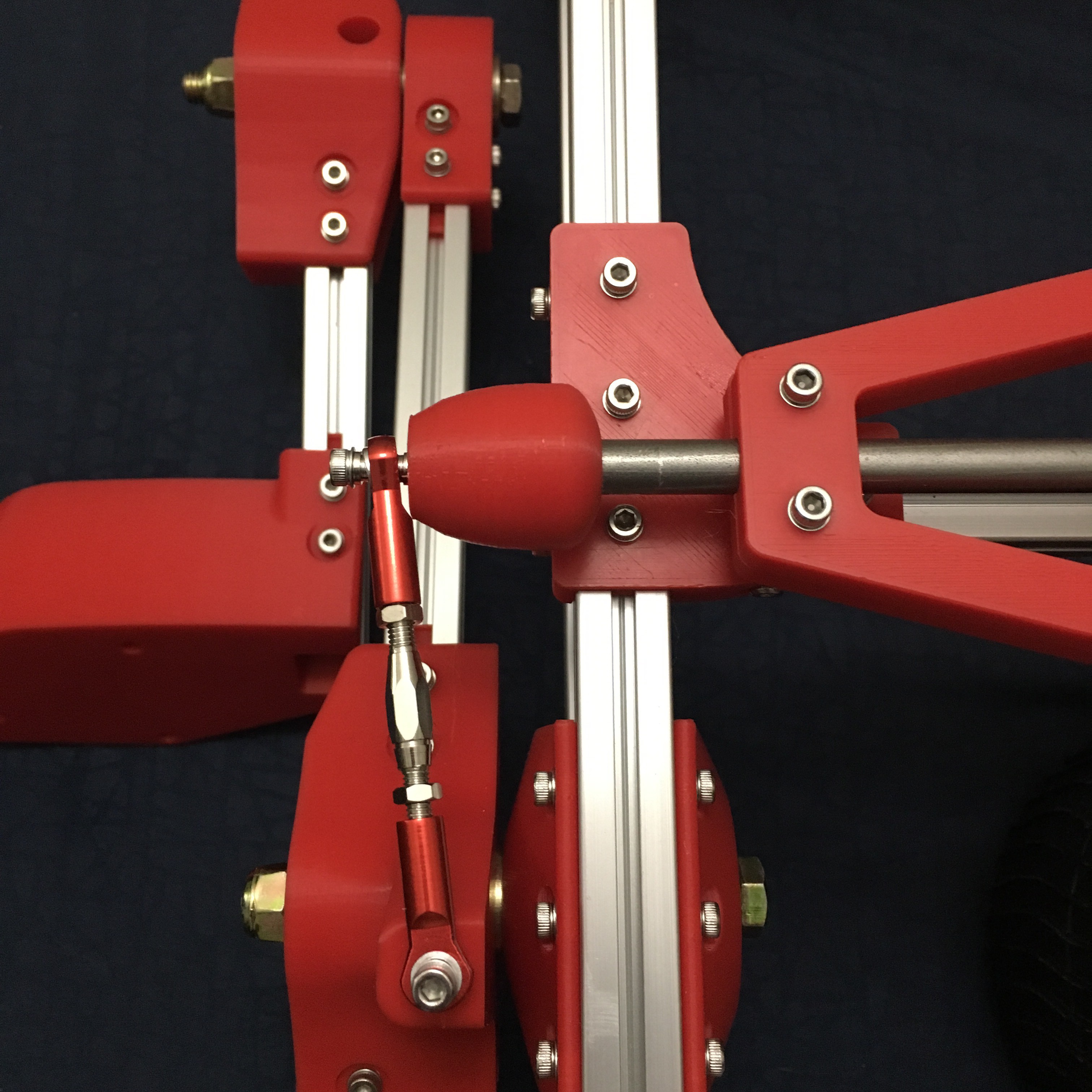
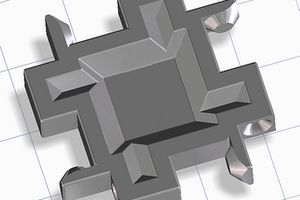
3 Designed similar to the Sawppy ones, I had to re-make the 3 Center Differential Parts because the Sawppy ones didn't fit properly.
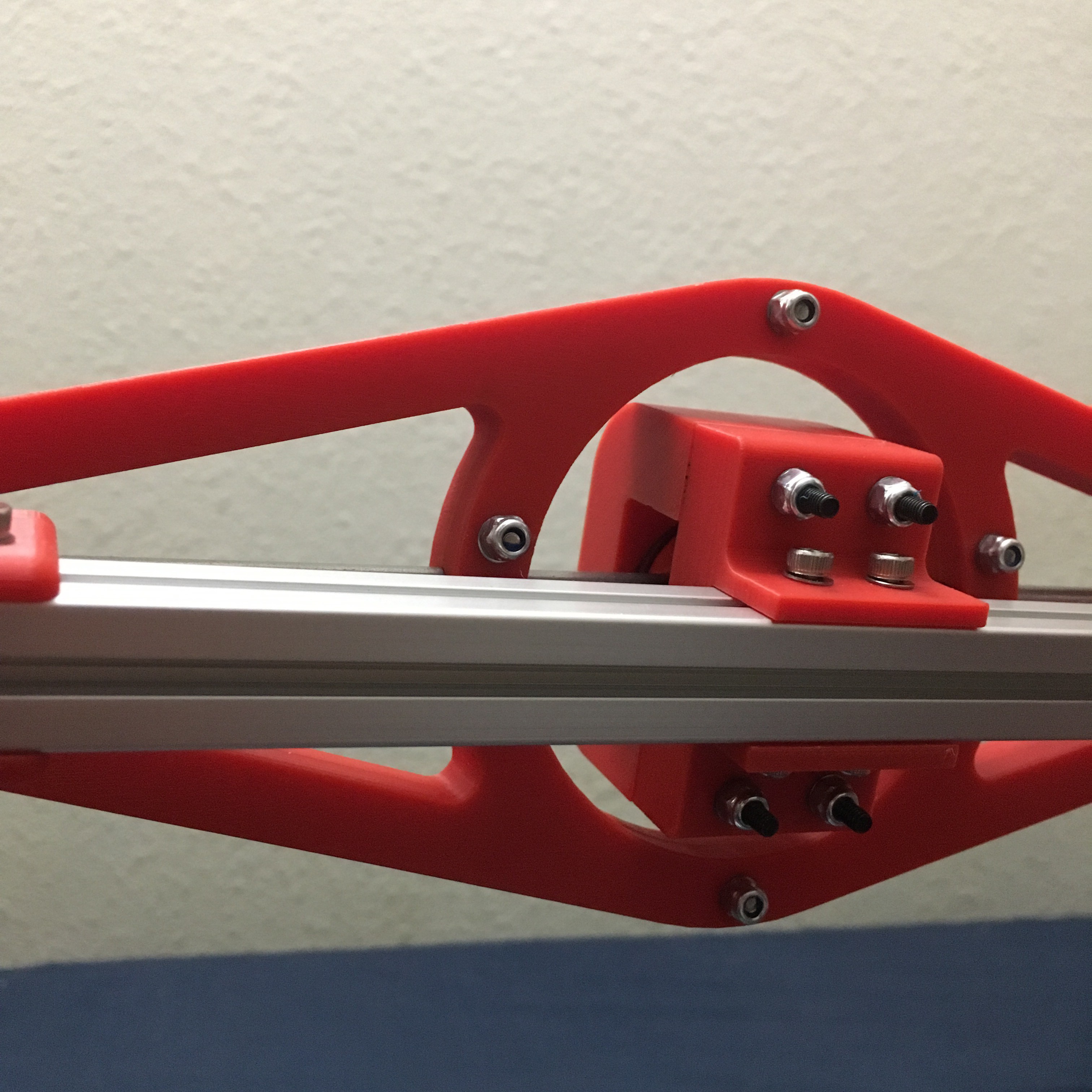
3 Designed as Optional Parts: Two parts I created as Bus Linker Housing, and one is a Support Arm for the floor panel (two of those needed).
* Other Edited 3D Printed Parts: I also used 4 edited parts (files) from the CJ Rover ttps://hackaday.io/project/165094-cj-a-sawppy-variant (Thank you Laura).
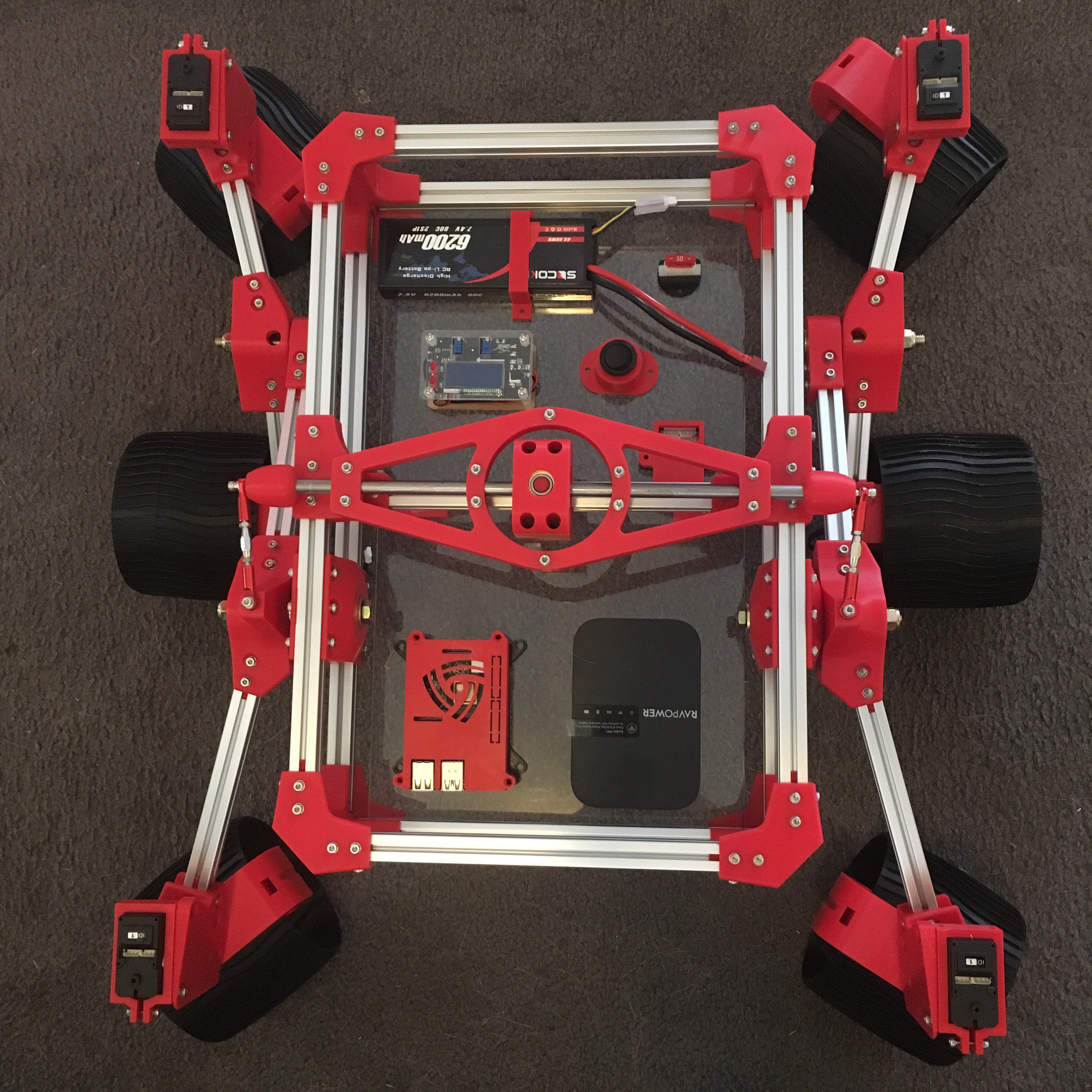
As a Final note in regards to 3D Printed Parts, I didn't print the Battery & Power Tray from the original Sawppy, I placed those parts on the Rover's Floor Panel.
-
Regrading the Components:
I only listed the components I used on my rover that are not mentioned on the SAWPPY 1.0 components.
-
Regarding the Logs: In the 5 logs, I wrote about the progress of putting the rover together, and variations I addressed during the build. They appear here from most recent to oldest.
-
Regarding the Instructions:
My instructions are a timetable for the sequence of chores that can be utilized to efficiently move forward with the build as it takes shape.












 Andrey Kalmatskiy
Andrey Kalmatskiy
 James Dietz
James Dietz

 Brian Brocken
Brian Brocken
Hi Ameer, fantastic job! It's absolutely beautiful.