 Ameer
AmeerThe original design (Sawppy 1.0) works, but as Roger and a few others noticed some wear & tear they made recommendations. In addition to all the 3D Printed parts that are edited and differ from Sawppy 1.0 here are some mechanical ones:
* I bought and used Screws, Washers, and Locking Nuts for the Bogie and Rocker Joints, instead of using the Steel Shafts. They fit the Barings perfectly. 4 Screws, 4 Nuts, and 16 Washers.
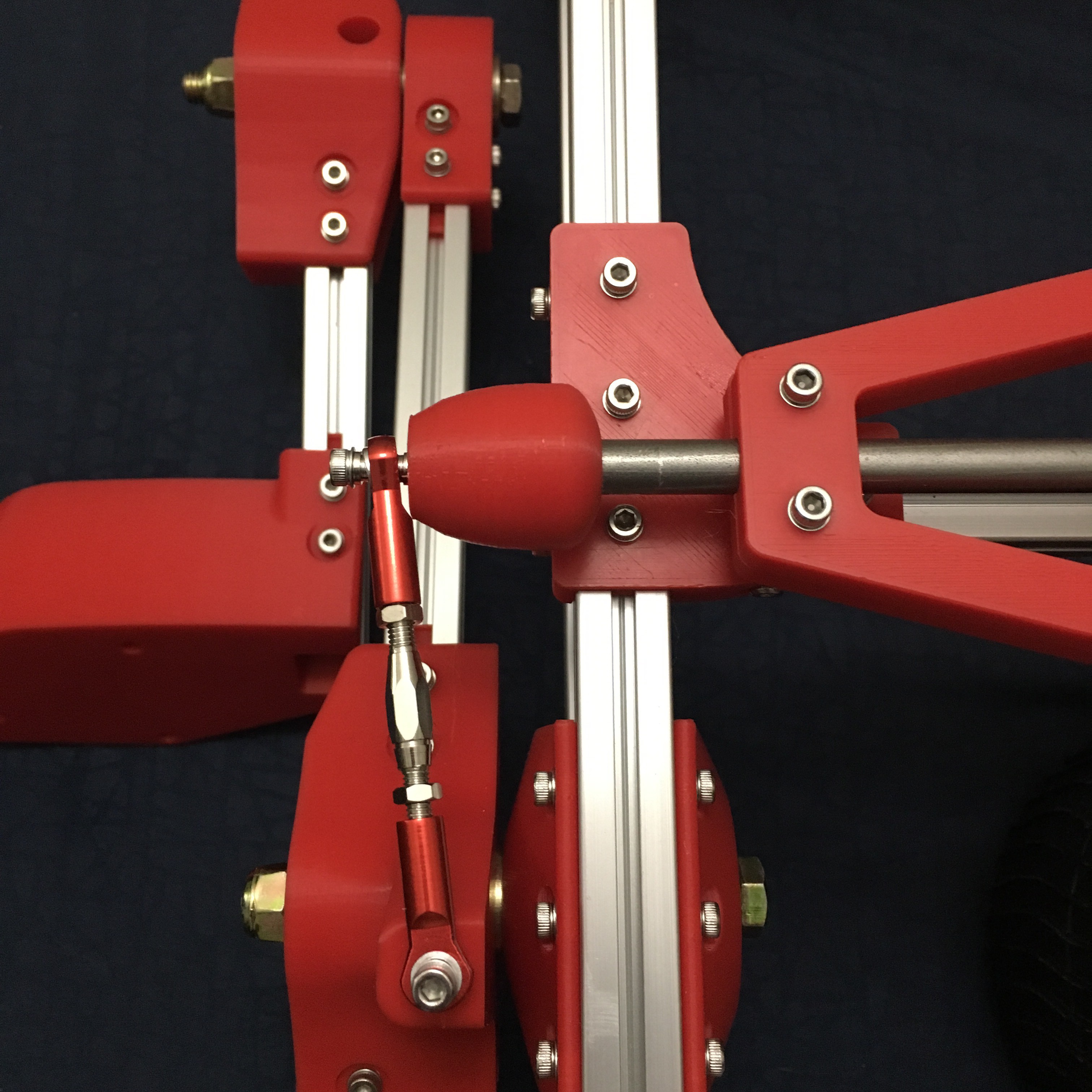
* I redesigned the 3 parts of the Central Differential joint because they were the only parts on the list of '3D Printed Parts' that didn't fit properly, I simplified the shape and made the top and bottom to accept 24mm M3 Screws and Locking Nuts. Only 4 needed (the black screws in the pic below). I also used locking nuts on all 10 Screws that combine the long differential cross members together (4 visible in the pic). I will be using locking nuts on other parts later, so if you copy this design get yourself two dozen M3 locking nuts.
* I used 40 of the 12mm M3 Button Head Screws to mount the 10 Servo Couplers onto the Servo Metal Horns. They were those, from Ace Hardware:


* I bought 10 Metal Horns They were these https://www.amazon.com/gp/product/B07D56FVK5/. The same ones used on the CJ Rover (Thank you Laura), I used different screws on them than CJ had - so on my rover the screws go into the coupler first then exit and thread onto the metal horn. In the pic below, they are the perfect length and they end up flush with the metal horns they screw into.

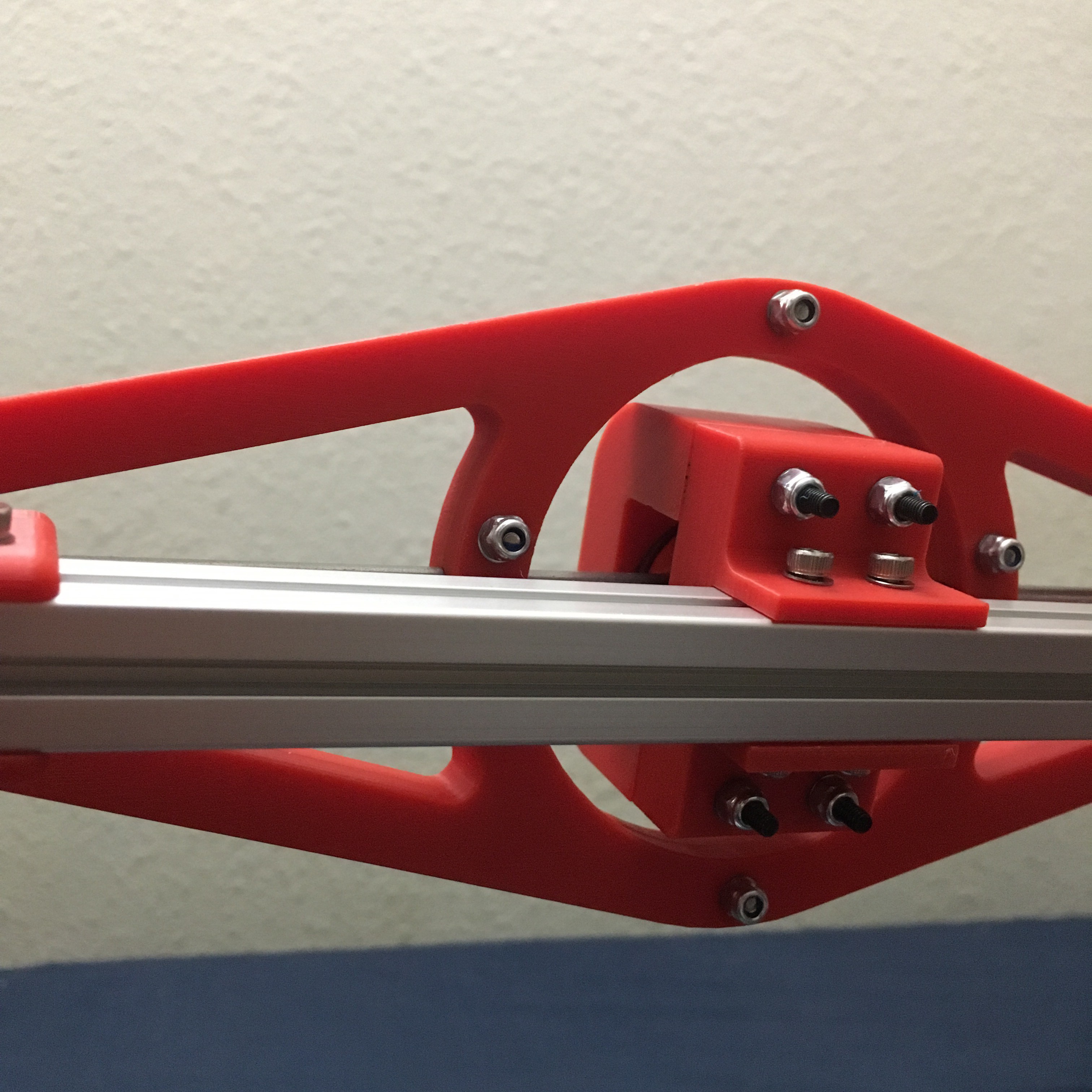
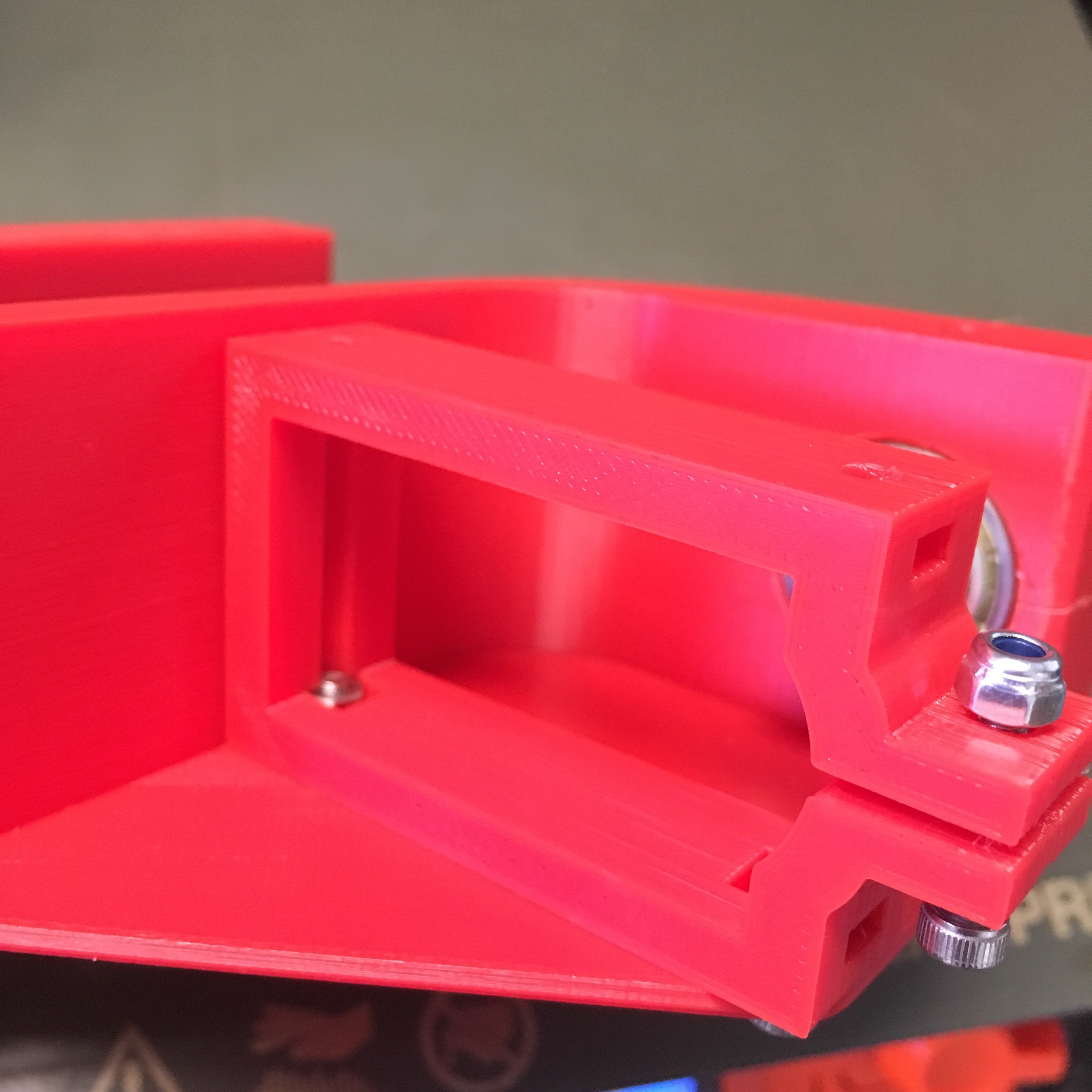
* I used a 16mm M3 Screw and a Locking Nut for each of the 10 Servo Bracket Clamps that I redesigned to clamp the servos. Also visible are the two slots I designed for nuts to properly mount the bracket to the wall.
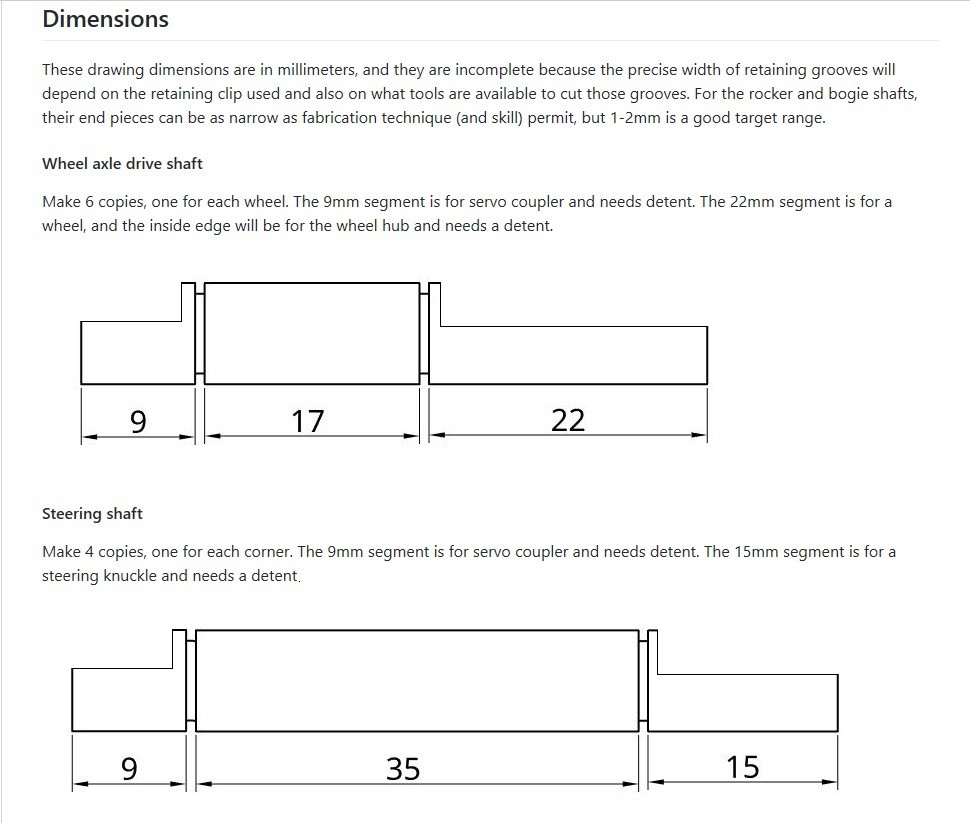
* The shafts for all 10 motors: I shaved the same detents used on the CJ Rover, which are different than the original design (Shaved all the way to the edge on both ends). Those work with the original design parts, but work better with the couplers edited and printed for them in the CJ design, which I also used (Wheel couplers and Servo Couplers).
The diagram is an edit from Roger's original diagram.

* The main wiring harness connecting the Bus Linker to all 10 motors in parallel can be configured in several ways, I chose to buy wires with compatible connectors that plug into each other and create the needed harness without cutting any wires.
The original connector name of the LX-16A servo is 5264-3Y. The 3 is for number of Pins, and the Y is a designation for the shape of the connector. I couldn't find long wires with end connectors that are 5264-3Y.
I believe they use these https://www.yoycart.com/Product/532736572990/ and those http://www.crazell.com/product/molex-5263-3p/ but I want my rover to have as many Plu-n-Play parts as possible, so I bought Universal Servo Wires: they fit tightly in the connector slot, have 3 pins that are separated by 2.5mm from one another, and they come in male-male wires, male-female extension wires, and splitter wires.


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
I'm glad to see this page continually being updated. If can spare a little extra time, I have a request: on each of these items, can add an explanation of WHY you chose to make that modification?
I want to learn from the experience of other Sawppy builders. Your reasons may range anywhere from "the original design failed" (very important for me to learn for the next revision) to "the original design required tools/parts I didn't have" (useful consideration for next revision) or even just "I think this looks better." (Perfectly valid!)
Listing the reasons would also help future Sawppy builders decide if the same reasons would apply to their own rover.
Are you sure? yes | no
Will do (: I am almost done with my build and - soon after - I will write about how I made choices in regards to options of materials and decisions when it came to parts. I hope it helps others as I learn from others too.
Are you sure? yes | no
Great work! I love seeing Sawppy builders customize each of their own rovers to suit their own personal preferences and/or adapt to the tools and parts available to them.
Are you sure? yes | no
Thank you for creating Sawppy, and for helping me with my build
Are you sure? yes | no