Hey everyone sorry its been so long but I am ready to once again pick up this daunting project. A lot has changed since my last log and the spot micro project has evolved. I had to scratch all those parts I printed in the last log, and reprint the new version. I am now working off Michael Kubina's github and have printed and assembled the mechanical design. The electronic parts are on order and will arrive in soon.
Here is the build so far, I might sand and paint it to improve the look.
As far as the second robot I plan to build I have decided to first build a robot arm using 5010 cycloidal actuators and odrives to get a better feel for them. Expect an update for that in ~1 month. I plan to have this robot finished and walking by summer.
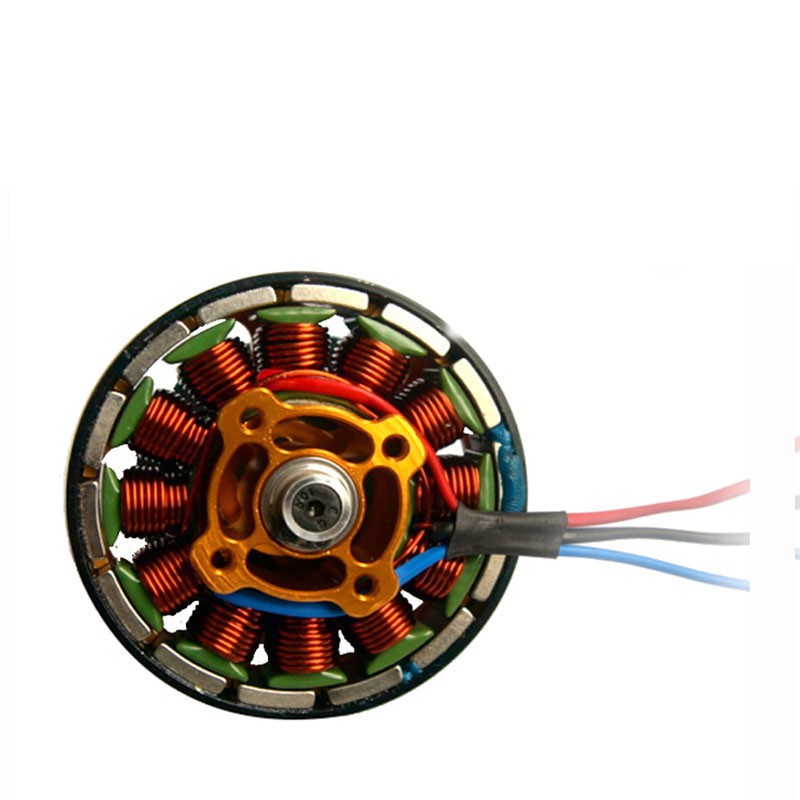
The last two weeks i have mostly been working on other projects such as my water scooter project which you can check out here. I am still waiting for the servos to come. I ordered them of Aliexpress and may have selected the Chinese warehouse instead of the us one. While im waiting on those, I selected the rest of the components to drive the quad. I will be using a ESP8266 microcontoller paired with a WITMOTION 16 channel servo controller. The ESP8266 is running Annex WiFi RDS. This allows me to program it wirelessly and run commands. The idea for this system comes from Bob Wind on the spotmicroai forums. He has some rudimentary code and a basic walking function already programmed but I plan to add a kinematic model. While i was not working on the servo driven bot i did do a ton of research for the brushless bot. I made spreadsheets comparing costs of some peoples open sourse robots. It is evident that i will have budgetary restraints. I will not be able to use the 6354 motors that i initially wanted to. I talked to many people in the community about motor and controller choice including Peter Wasilewski. Peter helped me out alot and linked to me this blog post comparing most of the popular motor choices. His favorite pick was the turnigy 5010 which sadly is discontinued and i cannot find anywhere. I scoured alibaba and found a very similar "5010" motors. The reason i put 5010 in quotes is because most cheap 5010 gimbal motors from places have a outer diameter of 50mm while the turnigy motors have a stator diameter of 50mm. This was very kindly pointed out to me by Paul Gould. Go check out Paul and Peters's projects if you haven't already, they are way cool. The motors i found are almost an exact replica of the GARRT 5010Sl motor Paul is using. They are marketed as 20kv lower at 280kv and at least in the pictures look like they have much nicer wound coils.
I picked 12 of these up for 16 bucks each plus $79 shipping to the us. Once the project is finished i will add a BOM with all the necessary links. As you can see from the motor picture, the bell has curved magnets just like the turnigy. Im not quite sure yet what i want to do in terms of gearboxes. I would like to do quasi direct drive using a planetary gear box for maximum compliance. Sadly I do not believe these motors will get the torque they need spinning that slow as they are a high kv for the application. Many chose to tackle this approach with a cycloidal gear box, which i will definitely test out, but i am worried about its backdrivability. I think the solution i will chose to go with is high gear ratio planetary gear box such as this one. It looks to provide smooth motion with smooth backdrivibility. Of corse i will test out all the different options and pick the best one. I think these will ll be fun little mini projects. Now lets talk motor controllers. I like odrives and rotory encoders, but 6 odrives and 12 encoders will by themselves break the budget. The only way to get around this is to build my own controllers. Now i know nothing about this, but luckily their are many people in the community working on ones that are open source. Yannis is working on the Tinymovr and Paul Gould on his ESP-32 Based Controller. Yannis has shown his controller in some very cool demos on his youtube channel linked here. I also know Joey Byrnes is working on one but i haven't heard from him recently. Of course nothing is set in stone as of now and these are just some ideas and projects i think are cool. For now i need to focus on finishing the servo based robot and prototyping some gearboxes. Hope you enjoyed this update and all my others stay tuned for more.
Just wanted to provide a short update on the project. I finished printing all the parts today. They were all printed in amazon basics petg. The feet were printed in amazon basics tpu. Here is a photo of all the printed parts. Most of the black parts were printed with 0.6 nozzle, the rest were 0.4. All printed on i3 MK3 clone with 3 shells and 20% gyroid infill. I have included a picture of the parts below.
Before i begin assembly i have to wait for the servos. I ordered them from a us seller a few weeks ago but they have yet to arrive. I have held of ordering parts for the brushless robot as i am worried about budgetary concerns. More to come on that on the next update.
Ok, im gonna redact my statement from the last log where i said i was gonna code these robots myself. After taking a look at James Burton's Mini Dog V2 code, i was dumbfounded by not only the complexity, but the sheer size of the code. It has now been made clear to me that no matter how many free online course with quirky professors i take (Harvard CS50), i still lack the experience to code something as complex as this, but i think i may be able to adapt other peoples code to work with my bots. Luckily, Paul Gould recommended me to a great source of information and help from the many kind and brilliant people on the o-drive discord. Now speaking of help here is where i need some. I am wondering if anyone has developed code for the Spot Micro project using an Arduino mega with a simple walk and gait.
I would like to mention a very cool project known as SpotMicroAi. Now this guy, Fran Ferri, is doing some extremely cool stuff involving an NVIDIA Jetsam nano and raspberry pi 4 board, and if you have not already you should definitely go check out what he's working on. Their are about 3 forms for this project, but from what i can find the most active is on slack. Now this is super cool but not really what im looking to do with this "learning" robot. The boards used are expensive and raspberry pi is definitely something im not comfortable with.
Lets talk servo choice. Their are pretty much two options people use for the spot micro. The very cheap, and very common MGN996R's or the more expensive, and harder to find jx-servo CLSHV5932MG.Now the cls servos are better in every single way. The're faster, strong, and way less likely to burn out. But at 25 bucks a servo, they are in brushless motor territory. Buying 12 of them would blow half my budget. Not to mention to get that 25 dollar price, I would have to buy them from china and they would take a month to come. So instead I bought the servos notorious for burning out on these robots, the MGN996R's. I got 12 of these servos from a us seller for 56 bucks shipped. Eventually i will add a BOM with prices and links to the sellers i purchased all the parts from for both robots.
Finally, im talking about actual, physical, advancements i have made. They aint much... First of all, i changed that pretty awful, low resolution, and eye hurting banner to a much more fitting and high res one. I plan to change the photo of the spot mini cad to my actual spot mini once the physical assembly is done. Speaking of the physical assembly, i am still printing the parts. I ran out of petg on the same day as the last log, and just got the new spools today. I estimate I should have thing thing fully put together next weekend. A lot of the parts for this are not very well optimized for 3d printing without supports so i may remix the original thiniverse files.
The big robot. While i am not concrete on this final project i have been talking to a very nice guy in the community who is making a V2 to his previous robot leg and integrating it into a full quadruped. More details are to come on this but the reason why i like his project so much is because its beautifully designed, and uses pretty much the best price to power motors you can buy which are electric skateboard motors. These motors, while costing the same as the more commonly used large drone motors, offer much more power. While im not sure if he wants me to mention his name or the projects name as it is not yet released to the public, i couldn't help but give you a hint on what awesome things are to come.
One final thing id like to apologize for is my bad grammar and spelling, but thanks for reading!
I have a huge project ahead of me, and in order to be successful i have to be as prepared as possible. I began looking into a whole bunch of open sourced quadrupeds. I mostly only looked at mammal like robots with two sets of parallel limbs. Not the spider like robots with 4 limbs 90 Degrees apart. I found most of these mammal based quadrupeds fell into two categories. The first category is smaller servo based quadrupeds such as the Stanford Pupper and the SpotMicro. The second category are much larger BLDC motor based platforms such as Paul Gould's very cool Quadruped using cycloidal gear boxes and Charles Galambos' Dogbot. I knew in the end i wanted to build one of these more powerful and capable bots that use brushless motors, but since im not very knowledgeable on the topic decided to start out with a simpler and cheaper servo based bots. It was a hard choice for me to pursue building the Stanford Pupper, the SpotMicro, or James Burtons smaller MiniDog. The first one i could take out of the running was the Stanford Pupper because even know it was the best performing dog and had source code already written for it, it required several custom machined parts. Even know I have a cnc machine and would be able to machine these parts, i know most people dont. It also called for servos that were almost $25 a piece which were most likely the reason for its high agility and performance, but i was not willing to shell out that much of my budget on the "learning robot". Then i had to decide between the Spotmicro or Minidog. I eventually landed on the mini dog due to it having more similarity in the structure to the larger bldc quadruped i wanted to build, and the fact that no one has released any code for it which would Force me to code it myself. I began 3d printing the parts from black and yellow PETG with relatively low 15% infill in order to keep the robot as light as possible. It was time for me to at least get a basic understanding of C++ and the Arduino IDE so I enrolled myself into a free course that many redditors recommended. Its taught by a professor at Harvard and known as Harvard CS50. The course is free to audit and due to the whole thing being prerecorded, lectures can be taken at anytime, at any pace. I was skeptical at first but the course really is something special. The professor is very enthusiastic and entertaining and teaches you most of the basic things to know to get started. I am only two weeks into the 12 week course but already feel way more comfortable in the subject. I will check in again next week in order to discuss the many open source BLDC projects that i can do after this first learning robot. But for Now, Peter Out.
 Peter Buckley
Peter Buckley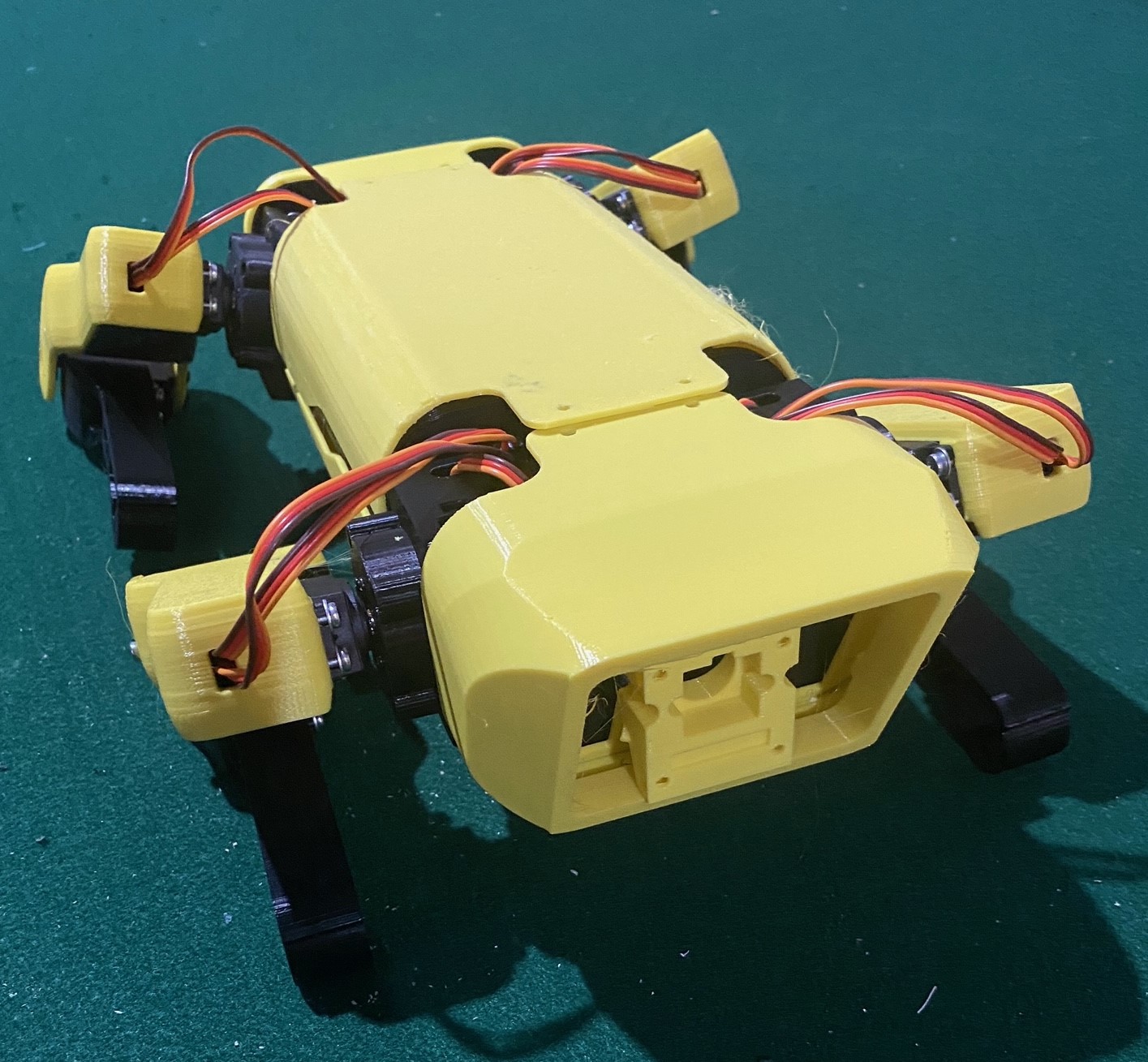

 I picked 12 of these up for 16 bucks each plus $79 shipping to the us. Once the project is finished i will add a BOM with all the necessary links. As you can see from the motor picture, the bell has curved magnets just like the turnigy. Im not quite sure yet what i want to do in terms of gearboxes. I would like to do quasi direct drive using a planetary gear box for maximum compliance. Sadly I do not believe these motors will get the torque they need spinning that slow as they are a high kv for the application. Many chose to tackle this approach with a cycloidal gear box, which i will definitely test out, but i am worried about its backdrivability. I think the solution i will chose to go with is high gear ratio planetary gear box such as
I picked 12 of these up for 16 bucks each plus $79 shipping to the us. Once the project is finished i will add a BOM with all the necessary links. As you can see from the motor picture, the bell has curved magnets just like the turnigy. Im not quite sure yet what i want to do in terms of gearboxes. I would like to do quasi direct drive using a planetary gear box for maximum compliance. Sadly I do not believe these motors will get the torque they need spinning that slow as they are a high kv for the application. Many chose to tackle this approach with a cycloidal gear box, which i will definitely test out, but i am worried about its backdrivability. I think the solution i will chose to go with is high gear ratio planetary gear box such as  Before i begin assembly i have to wait for the servos. I ordered them from a us seller a few weeks ago but they have yet to arrive. I have held of ordering parts for the brushless robot as i am worried about budgetary concerns. More to come on that on the next update.
Before i begin assembly i have to wait for the servos. I ordered them from a us seller a few weeks ago but they have yet to arrive. I have held of ordering parts for the brushless robot as i am worried about budgetary concerns. More to come on that on the next update.