0%
0%
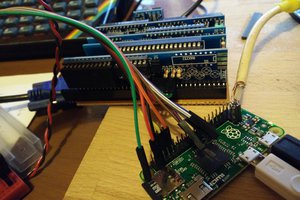
Roomba 537 SLAM
I found a Roomba in an e-waste bin and decided to give it the gift of SLAM
 Podge
PodgeBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 The first method that came to mind for doing this was to employ Philips trusty I2C bi-directional level shifter (but only configured for one way communications) which is described in their application note "
The first method that came to mind for doing this was to employ Philips trusty I2C bi-directional level shifter (but only configured for one way communications) which is described in their application note "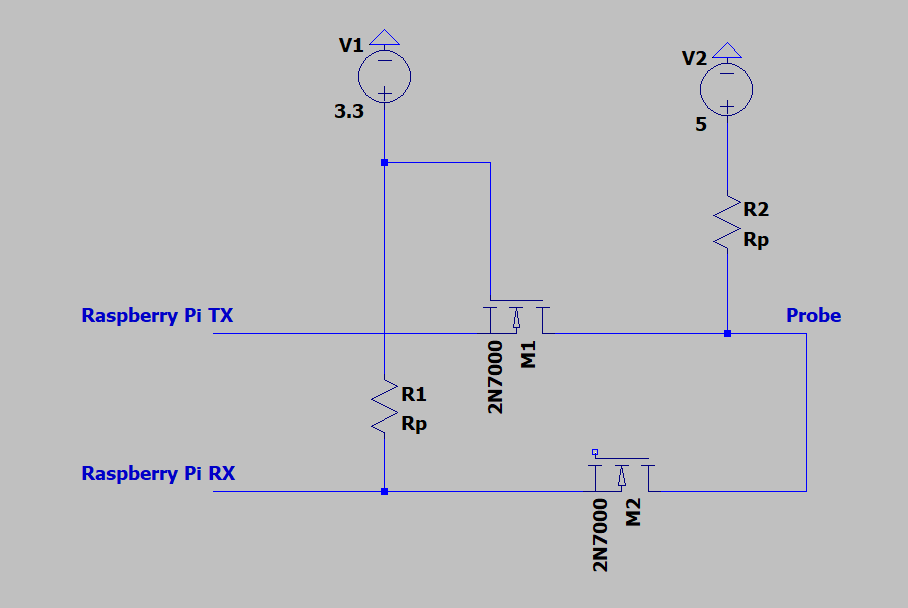


 spencer
spencer

I like your concept. Are you still working on this? I'm doing something similar using an ESP8266. What are you planning to use as input for your SLAM? Also, check out my uploaded library/class and software. Might give you a head start.