 Miguel Ayuso Parrilla
Miguel Ayuso ParrillaThis log is about polishing the gaitPlanner as you can see in the next video:
What is interesting on this video is that no control algorithm is running, but it seems very stable.
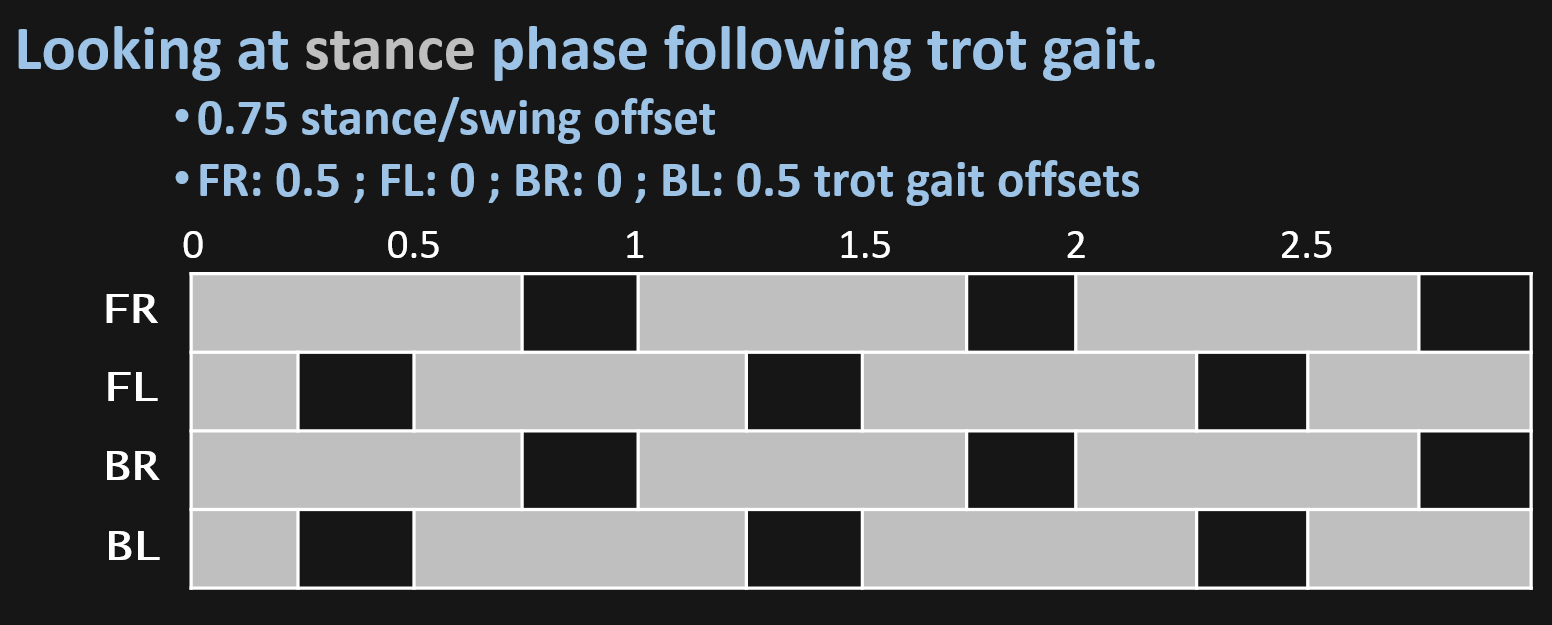
This is achived just by separating stance phase from the swing (as explained in the gaitPlanner.py log), this way i can define an offset between both phases, so running the stance phase at 3/4 of the hole step, makes the robot to hold its weigth on the 4 legs for a short period of time being a bit more stable, just by running the gaitPlanner loop.
Visually the gait is defined like follows:
Aditional info about that is that servos got very hot if it runs for more than 10 minutes.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.