 Anthrobotics
AnthroboticsIntended Specs for V1:
- Operating Voltage: 11.4 - 14.8 V
- Continuous Current: 30 - 50 A (Depending on the ESC)
- Peak Current: 35 - 60A (Again, ESC dependent)
- Interface: PWM, Serial (over USB)
- Control Feedback: Position w/ off-board encoder (e.g. localized on joint being actuated)
- Cooling: 40mm active cooler
- Cost: ~$50 - $60 CAD
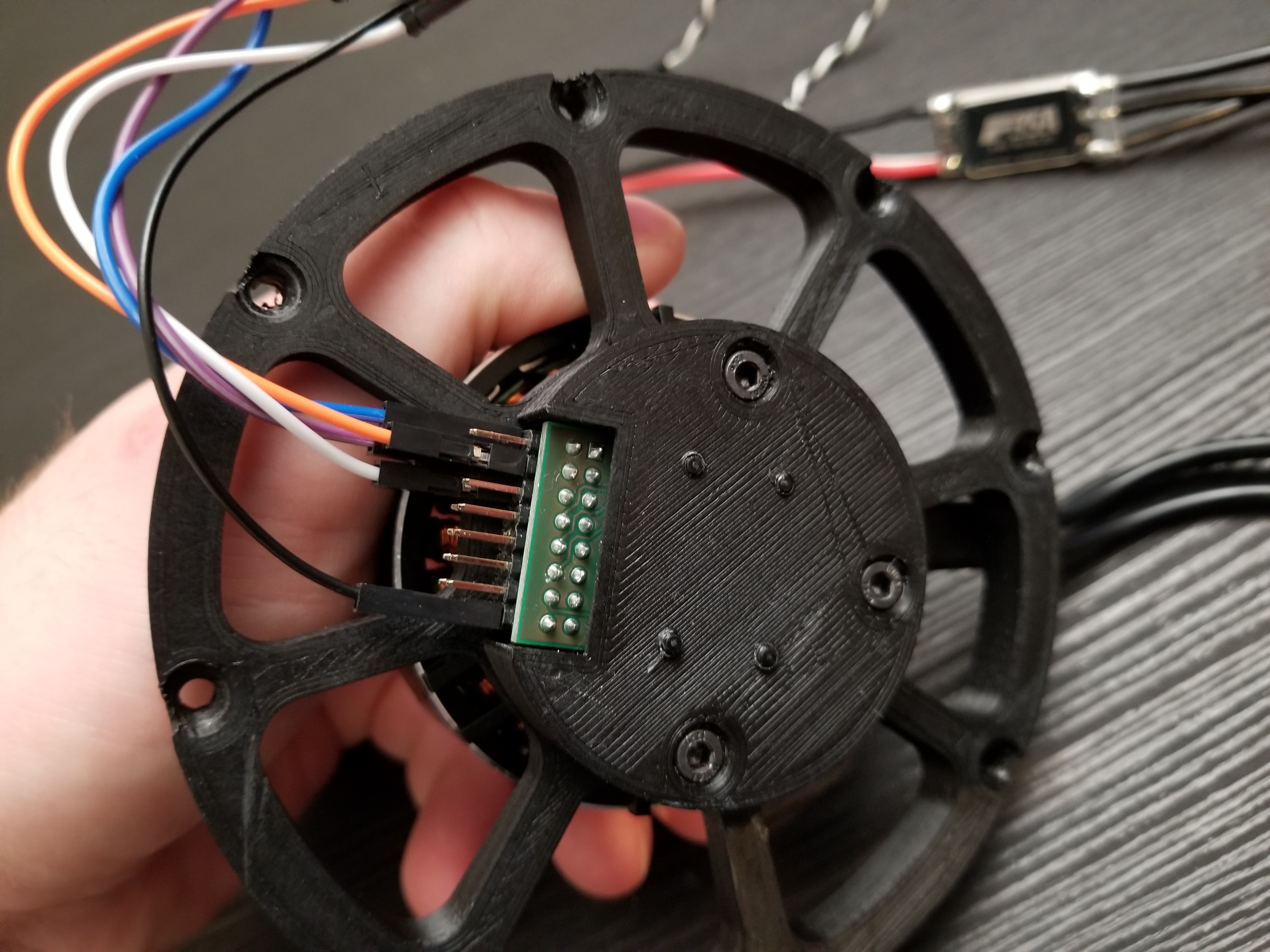
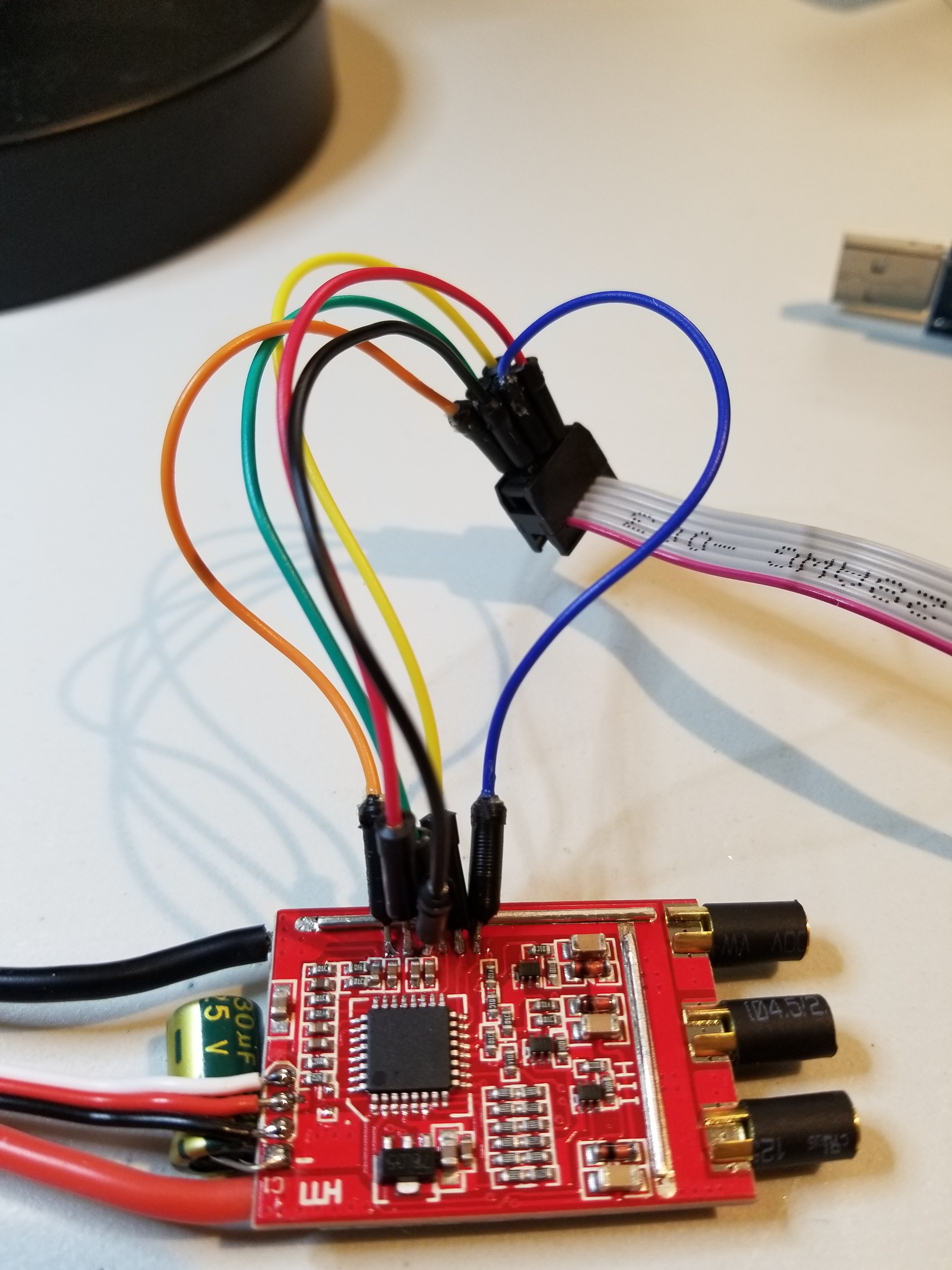
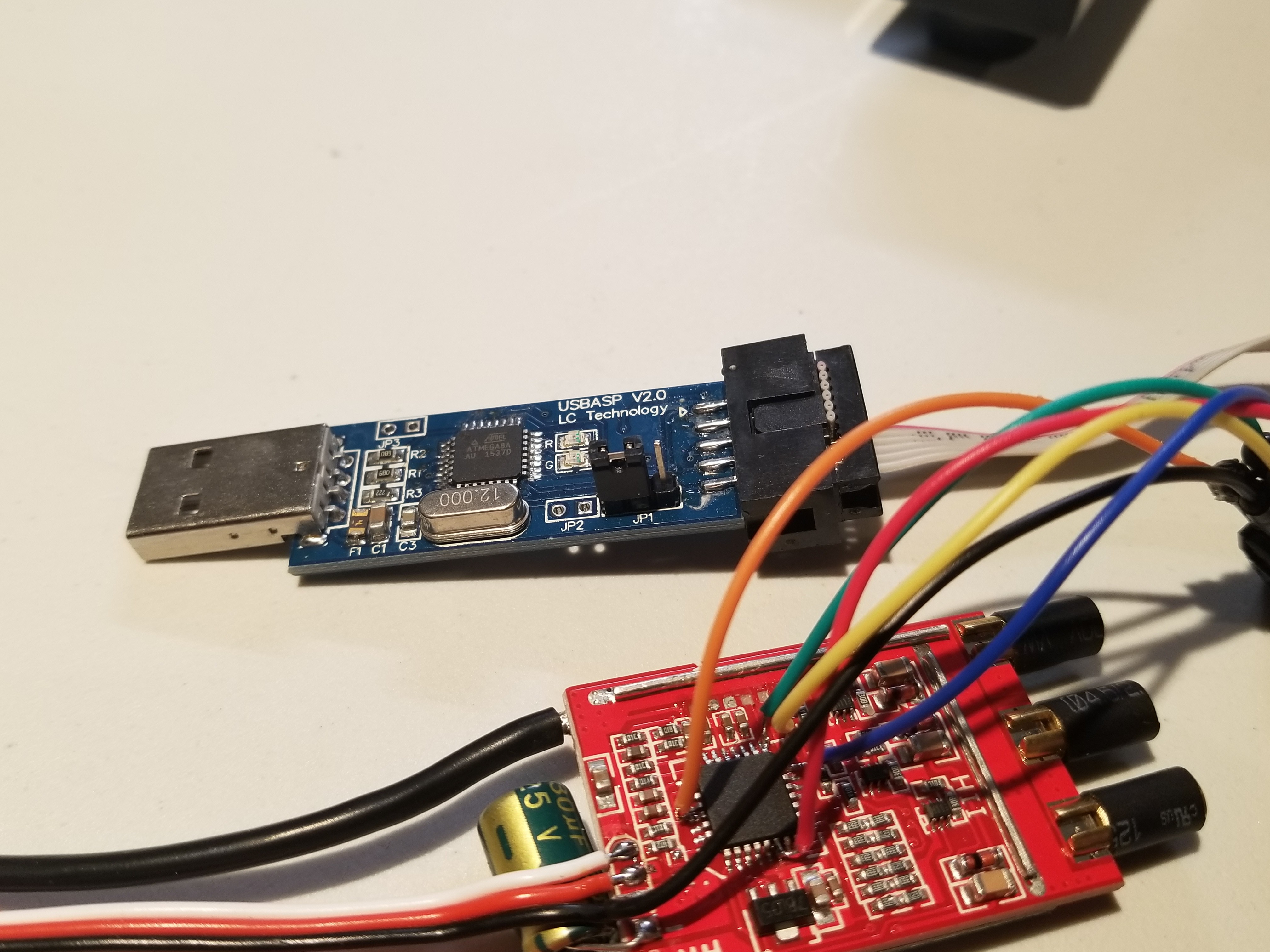
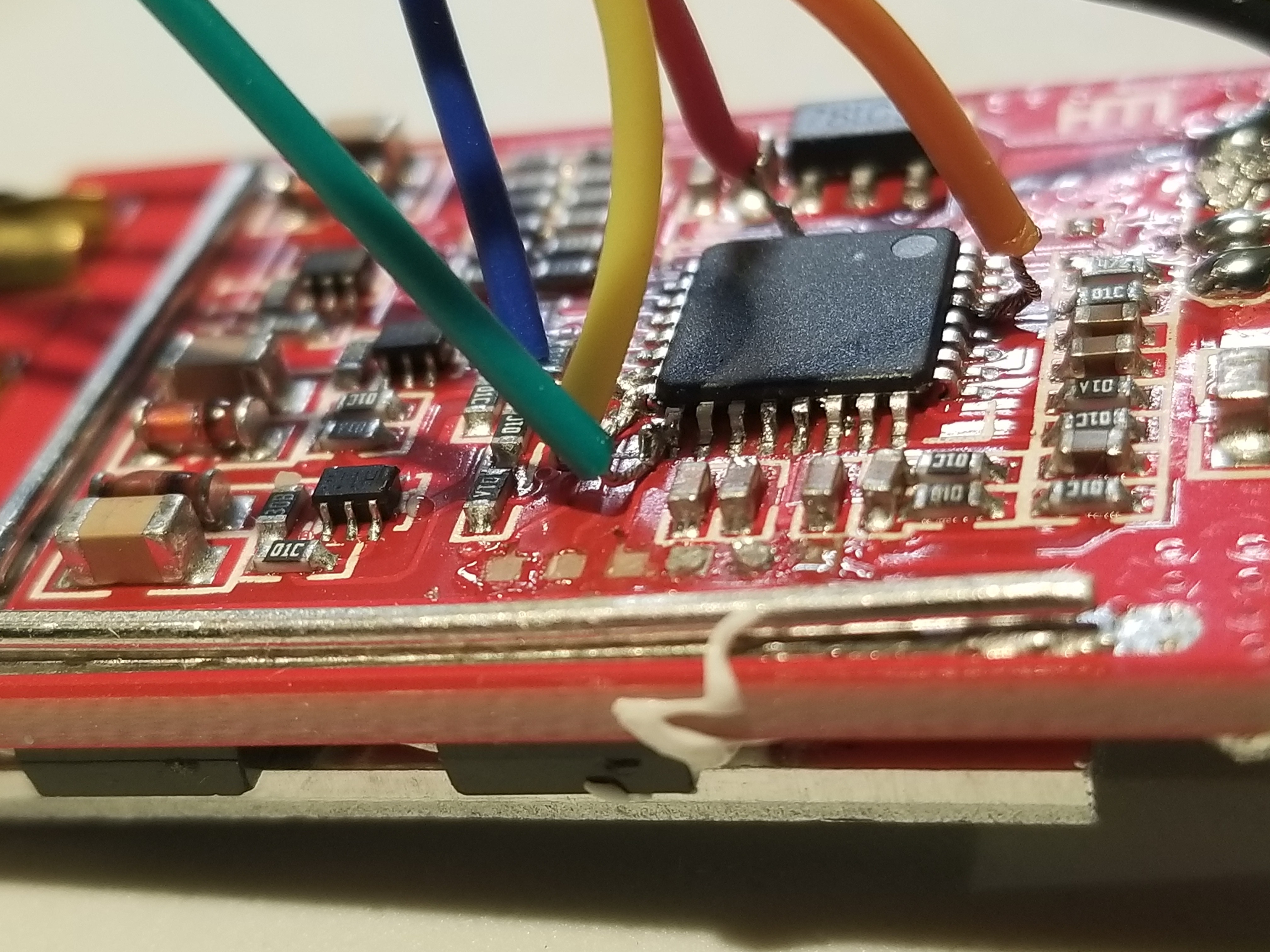
Materials consumption for developing the V1 controller will be low, and all required components are on hand. Work required to build it consists of some simple hardware changes to an existing ESC, flashing custom firmware to the onboard MCU, and programming a master MCU for controlling the ESC. Progress can be checked in the project logs below.





 Mayel Sorelus
Mayel Sorelus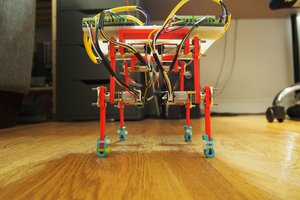

 Paul Gould
Paul Gould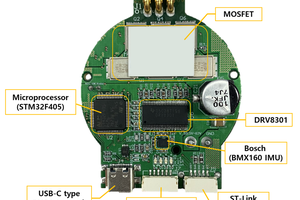
 Dongil Choi
Dongil Choi
I love that this is a project. I’m actually doing something very similar for my recent brushless quadruped project, except with really cheap ESCs that have bidirectional movement built into the blheli_s firmware options, so that wasn’t a hurdle. (I did go through a bin of assorted ESCs before I arrived at these NIDICI 35amp units) Currently also working on wrapping up position control, however I’m using Arduino to handle the PID. I’m aiming to achieve a cost effective solution for hobbyists to make these dog robots possible without dropping $$$ on odrive units or custom driver boards, as well. Would love to chat sometime maybe we can compare notes!