 sgall17a
sgall17aWhat is a tissue processor.
Living tissue is naturally soft, non-uniform and almost transparent. Tissue must be "processed" before it is suitable for microscopic examination. Processing hardens the tissue and replaces the water with wax. This allows it to be embedded into a block before it is cut into thin slices about 4um thick.
Wax and water do not mix so we have to replace water in tissue with wax with a series of solvents. The standard method replaces water with alcohol (ethanol), then replaces the alcohol with xylene . Finally the xylene is replaced with wax.
Tissue is soaked in a series of chemicals. One way is to have a series of beakers (usually about 1-2 litres) and then to move tissue from one beaker to the next. This is often done by a machine called a "rotary processor". The alternative approach is to leave the tissue in one container (the "retort") and pump the chemicals in and out of the retort. This project takes the second approach.
The older rotary processing machines had about 10 beakers and mechanically moved a basket of tissue around. These were large (about 1.2metres in maximal dimension) and constituted "heavy engineering" compared to most laboratory machines. Sequencing was done by clockwork. Refurbished machines are available secondhand for a few thousand dollars, up to to about $12,000 for a new one.
Having a fixed retort with pumped chemical makes it easier to change conditions in the retort such as vacuum and heat. Most modern machines use this model. They are complex and expensive (about $42,000+). Secondhand machines, are still quite expensive and have a reputation of being unreliable.
Brief description of this project.
This project takes advantage of microcomputers, commonly available components such as plastic bottles, servo motors and a few 3d printed parts to duplicate most of the functions of pumped type tissue processor at much lower cost. Even using new components from China, material costs should be below $100 or so.
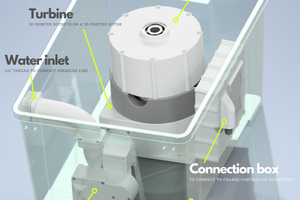
The processor is build up from a number of chemical modules. A module comprises the retort (shared between modules) and for each chemical a plastic bottle with silicone tuning connecting the retort to the bottle. A 3d printed pinch valve cuts off flow in silicone tube by external pressure. The retort fills with chemical by suction and is emptied by positive pressure blowing the chemicals back into the bottle. A microprocessor coordinates the pinch valve, and the two micro air pumps.
The retort can operate at room temperature and normal atmospheric pressure (like the old rotary processing machines ) for most stages. A magnetic flea stirs the liquids. Suction is used to fill the retort and this suction could also supply some vacuum for the retort.
Why are Pinch valves and air pumps are used as the pumping mechanism? Air pumps are cheap and reliable compared to fluid pumps for noxious chemicals and are never exposed directly to the chemicals. Using a pinch valve means that there are no valves or other mechanisms exposed to chemical to clog or corrode. It is easy to replace the silicone tubing if required.
Formalin, alcohol and xylene are liquid at room temperature but wax needs to be kept at 60C to remain liquid. The easiest approach would be to make the final wax handling a manual process ie put the basket of fixed tissue into wax by hand. Automatically wax handling would require a heating mechanism, possibly pumped domestic hot water. There is a good case for automating the wax step because on a typical overnight cycle tissue is ready to be placed in wax in the early hours of the morning. Since wax is the final step, a good compromise...
Read more »
 Fabian
Fabian
 Andrew Mayhall
Andrew Mayhall
 helge
helge
Very cool project. I have thought about automating a simple three solution pathology stain so I am excited to see other "citizen science" specimen prep being developed. How will you measure/gauge how well the process worked?