 Lucas Gerez
Lucas GerezThe body-powered exoskeleton glove consists of four different main parts:
- The differential module
- The soft glove
- The tendon tensioning and adjustment mechanism
- The harness
In order to build the body-powered exoskeleton glove, the differential module, the soft glove, and the tendon tensioning and adjustment mechanism must be assembled.
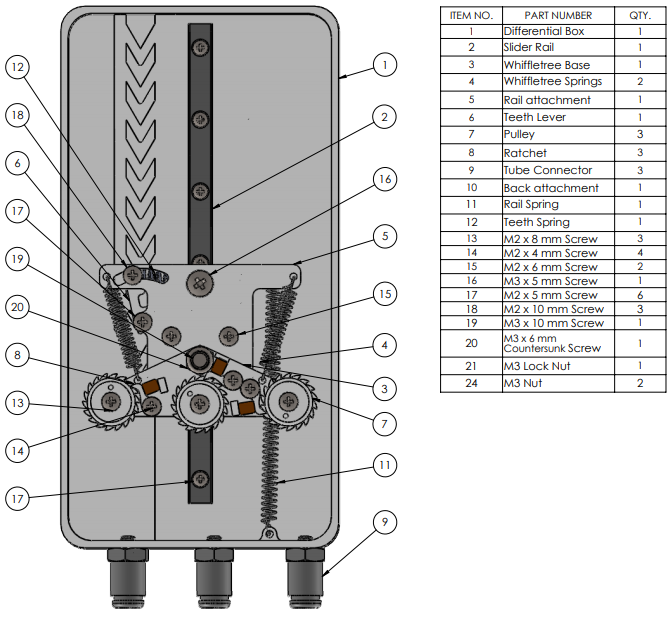
Differential Module Preparation
In order to prepare the differential module you will require the following parts. The 3D printed parts are represented by the white parts. The video shows the assembly procedure of the differential module.
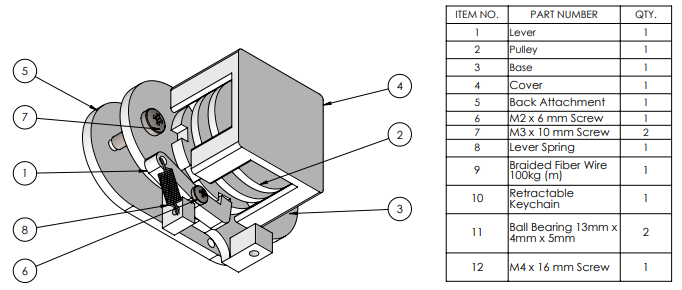
Tendon Tensioning and Adjustment Mechanism Preparation
In order to prepare the tendon tensioning and adjustment mechanism you will require the following parts. The 3D printed parts are represented by the white parts. The video shows the assembly procedure of the tendon tensioning and adjustment mechanism
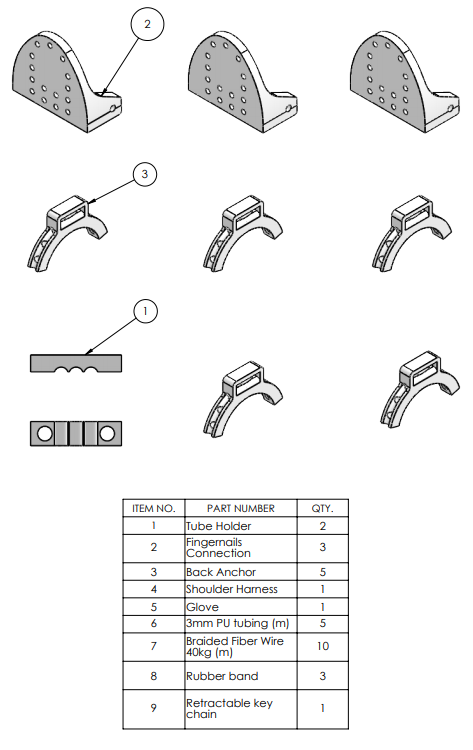
Soft Glove Preparation
In order to prepare the soft glove you will require the following parts. The 3D printed parts are represented by the white parts. The video shows the assembly procedure of the soft glove.
Device Assembly
The video below shows the assembly and testing procedure of the body-exoskeleton glove.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.