 Lucas Gerez
Lucas Gerez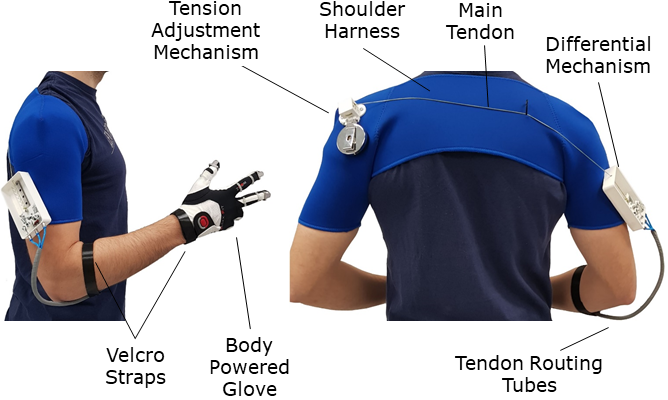
A Body Powered Exoskeleton Glove
The body-powered exo-glove was designed to enhance the grasping capabilities of the user, providing easiness and intuitiveness of operation, with long autonomy, low maintenance, and low cost. The device consists of four different parts: the differential module, the soft glove, the tendon tensioning and adjustment mechanism, and the harness (see Figure below).
The differential module is a solution for tendon tensioning and even distribution of the grasping forces for the participating fingers. The particular differential mechanism can also be applied to different underactuated prosthetic and orthotic systems. Differentials based on the whiffletree mechanism are widely used in underactuated robot hands. The differential is divided into three different parts: the ratchet clutch, the linear ratchet, and the spring loaded whiffletree mechanism. The ratchet clutch mechanism consists of a ratchet-pulley block for tendon wrapping, a pawl that blocks the rotation of the ratchet in one direction and an elastic element that acts as a spring and pushes the pawl against the ratchet teeth, constraining its motion in the other direction. This mechanism allows a fine and precise adjustment of the tendon length (with a precision of 0.87 mm). The purpose of using this mechanism is to adjust the length of multiple tendons that are routed through the tendon routing tubes and reach the glove. In order to keep the tendon tensioned for a long time, a linear ratchet was used. This mechanism guarantees that the tendon is locked in one position until the mechanism is used again. This mechanism consists of several "V" shape teeth arranged on a row, a lever, a rail, a base, and two springs. The rail is fixed to the differential module through screws and the base can slide on the rail guaranteeing that the motion of the base always happens on a single axis. When the upper cable is pulled, the lever is pushed by a spring against the teeth until the system reaches the desired position. Then, the lever slides into one of the "V" shape teeth locking the mechanism and keeping the tension constant. When the system is re-engaged, the lever is pulled again to the channel and a spring that connects the base to the differential module walls pulls the base until the lever reaches its lowest position and the tendon returns to its initial tension. When the upper cable is pulled again the cycle is reinitialized. The ability to keep the tendons tensioned for long periods of time is of paramount importance for underactuated and body-powered systems, since in other tendon-driven, motorized solutions (e.g., fully-actuated systems) the dedicated motors can adjust the tensioning of the tendons and hold the load while the grasping and manipulation of the objects take place.
The body-powered mechanism allows the transmission of forces from the upper body (e.g., the shoulders) to the index, middle, and thumb fingers through the tendon routing system. Simple body movements can increase the tension of the tendon, actuating the soft exo-glove. The differential mechanism is used to evenly distribute the forces to the fingers. In order to operate the device, this cable must be accurately tensioned and for this purpose, a tension adjustment mechanism was designed. The mechanism consists of a base where the parts are connected, a lever, a pulley with rectangular teeth, a cover and a retractable reel. After wearing the mechanism, the user presses a lever and the cable on the reel (separate from the tendon) rotates the pulley in the counterclockwise direction wrapping the actuation tendon around it and tensioning it. The plastic cover guarantees that the cable does not slip out of the pulley channel.
The proposed harness was chosen for the body-powered device because it is comfortable and helps to keep the shoulders aligned. When the right arm or the shoulders move transmitting forces to the main cable, the differential is pulled and the artificial tendons of the fingers are tensioned. These tendons are in charge of moving the fingers and they are made out of a low friction braided fiber of high-performance UHMWPE (Ultra-High Molecular Weight Polyethylene). One end of the tendon is terminated on the differential mechanism and the other end on a stainless steel structure at each fingertip. It must be noted that the execution of tasks with the body-powered mechanism takes longer due to the longer body compensation motions that are required to actuate the exo-glove. The body-powered exo-glove was designed to be as simple and straightforward as possible to allow people to use it without intense training. The device can be adjusted to all body types and sizes. The personalization occurs only for the glove and the harness because the size of these items depends on the user's height and weight.
The prototype of the body powered mechanism costs less than 100 USD to produce and weighs less than 400 g. To the best of our knowledge this is the lightest among all the assistive exo-gloves currently found in the literature. It is important to highlight that this solution can be extended to different actuation units. The force transmission from the shoulder to the fingertips could be executed by other members or external systems if the person cannot use other body parts (e.g., a motor could replace the tension adjustment mechanism to tension the cable that comes from the spring loaded differential mechanism).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.