 Lucas Gerez
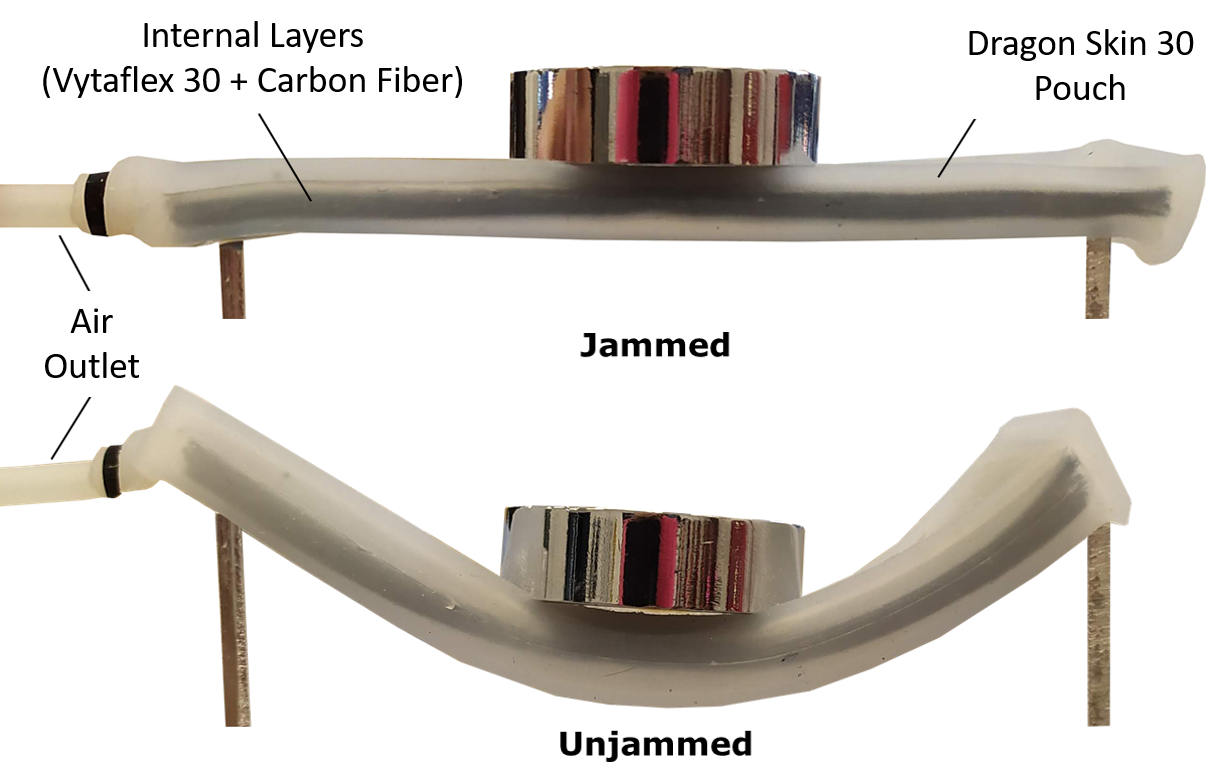
Lucas GerezThe soft, laminar jamming structure offers multiple stiffness by applying a pressure gradient to the system. The figure below shows a 100 g weight being used to demonstrate the structure’s ability to resist deflecting loads when jammed (high stiffness) and to freely deform when unjammed (low stiffness). The structure consists of a soft pouch with several thin layers inside it. When the vacuum is applied inside the pouch, the high friction between layers stiffens the entire structure. Each jamming structure contains seven thin layers encased in the silicone vacuum pouch. Each layer is made out of a urethane rubber matrix (Smooth-On Vytaflex 30) and carbon fiber sheets. The composite layers retain the high flexibility of the rubber (promoting passive extension of the fingers) and low deformation in the axial direction of the carbon fiber (increasing the bending resistance when the structure is under vacuum).
The elastic properties of the jamming layers and the soft pouch promote the passive extension of the fingers, keeping the human hand in a natural, zero-effort pose, but can also be used to hold the hand in certain configurations when jammed.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.