 Anany Dwivedi
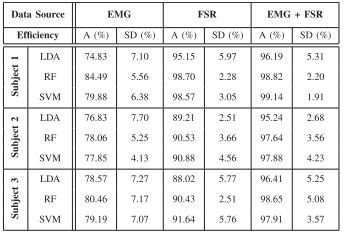
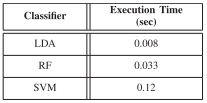
Anany DwivediTo control the proposed motorized exoskeleton glove, the wearable muscle-machine interface was used. It combines Electromyography (EMG) and Forcemyography (FMG) sensors to decode the user’s intentions and discriminates between different grasp types. In order to develop the intention decoding models Linear Discriminant Analysis (LDA) based learning scheme was selected after considering the trade off between accuracy of classifying the grasps and the time taken to make the predictions. The other techniques that were considered were, Random Forests (RF) and Support Vector Machines (SVM). The examined RF based models were trained with 100 trees and max depth of each tree as 10. For the SVM classifier we used a non-linear RBF kernel. Along with the type of classifier, the performance for the two types of data (EMG and FMG) was also evaluated. More precisely, the training data was divided into 3 different sets. In Set 1, only the data from the EMG sensors was used for training the classification model. In Set 2, only the data from the FMG sensors was used for training and in Set 3, data from both EMG and FMG sensors was used for training. The classification performance over the 5-fold cross validation method for the three different classifiers and the different sets of data is presented in Table I. The execution time to predict the grasp types for 10,000 data points (samples) for the three examined classifiers is shown in Table II.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.