0%
0%
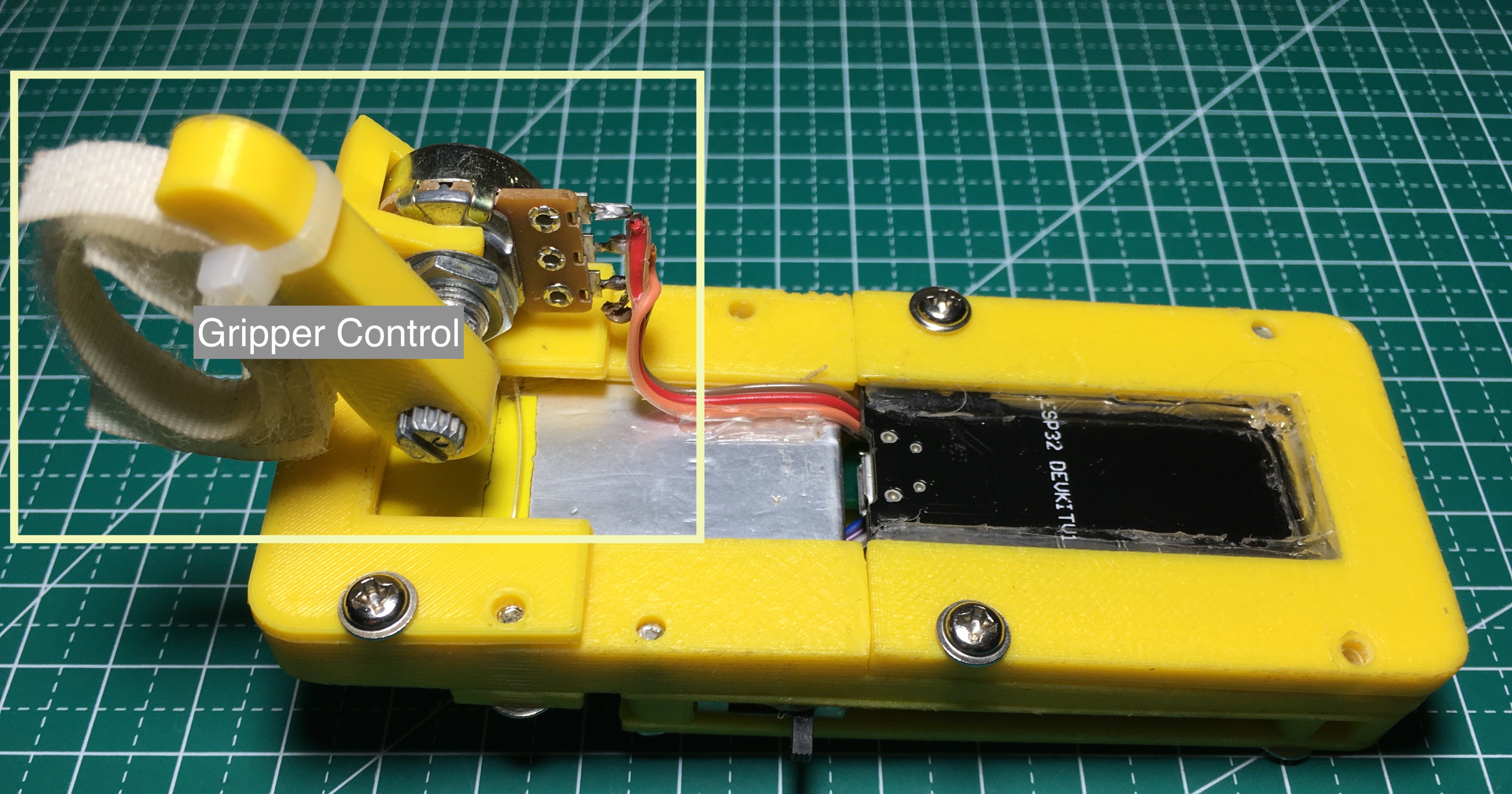
[2020] ROS bluetooth controller [prototype]
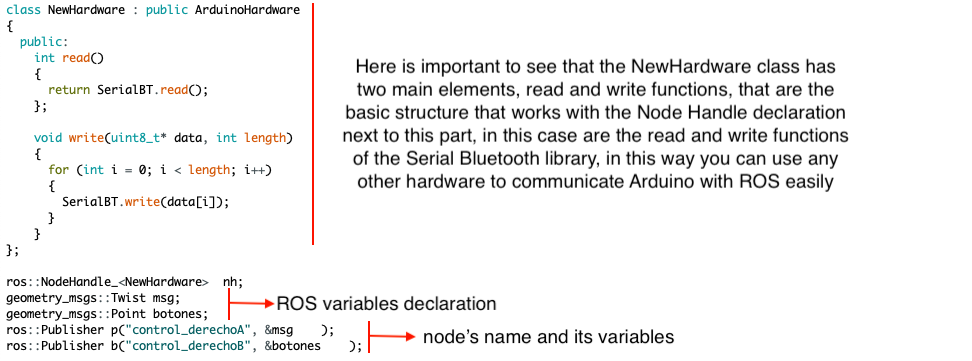
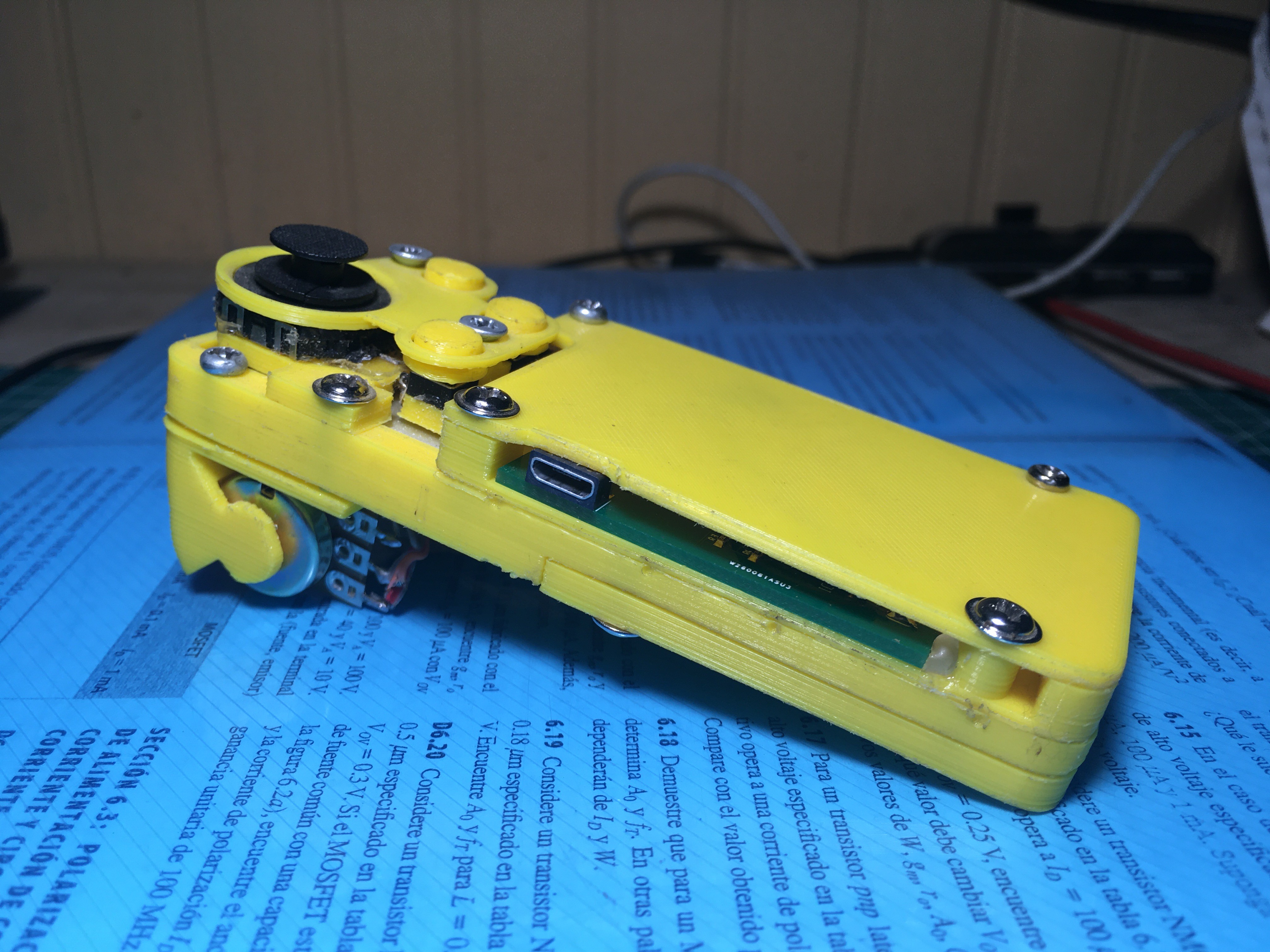
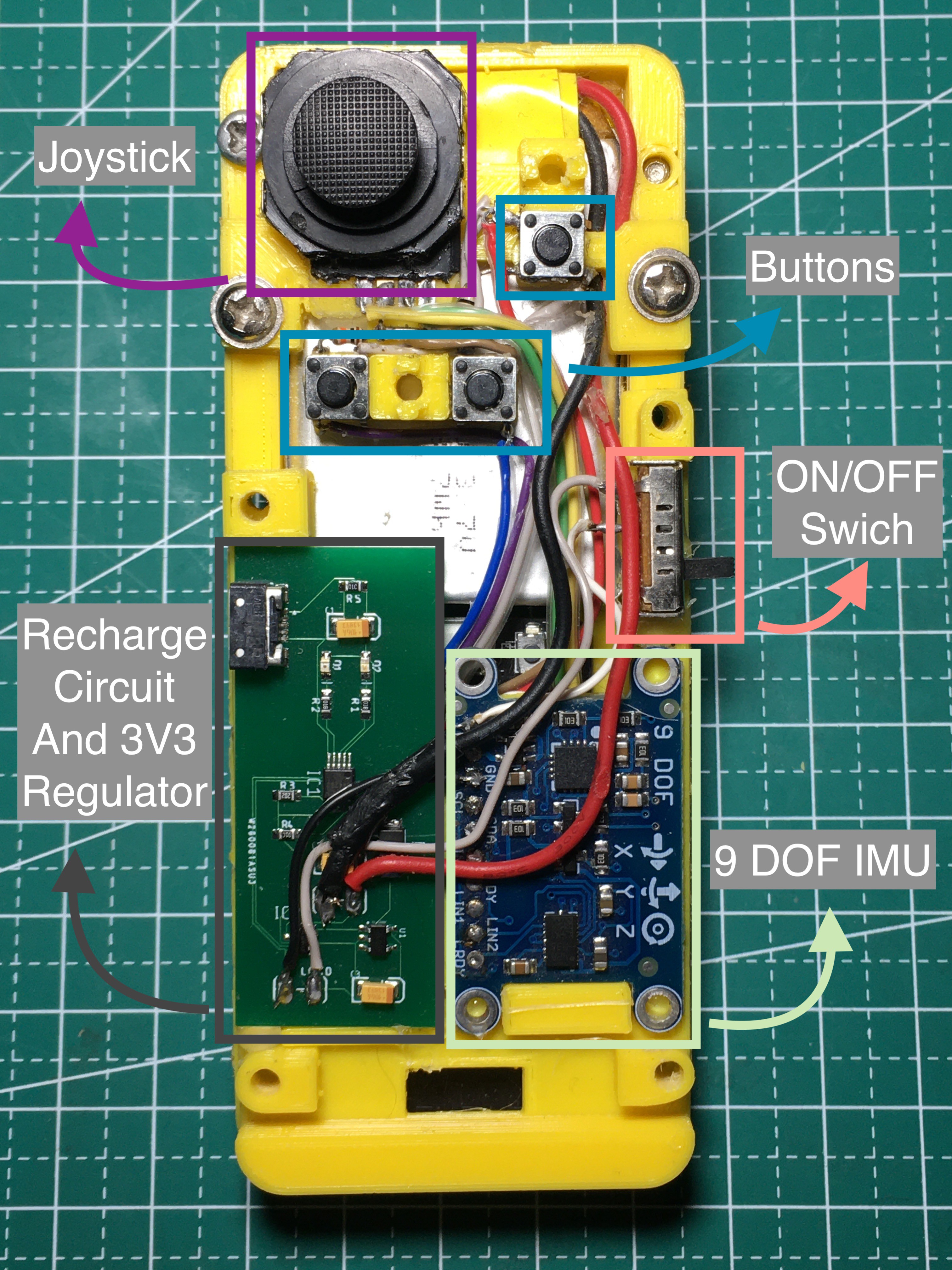
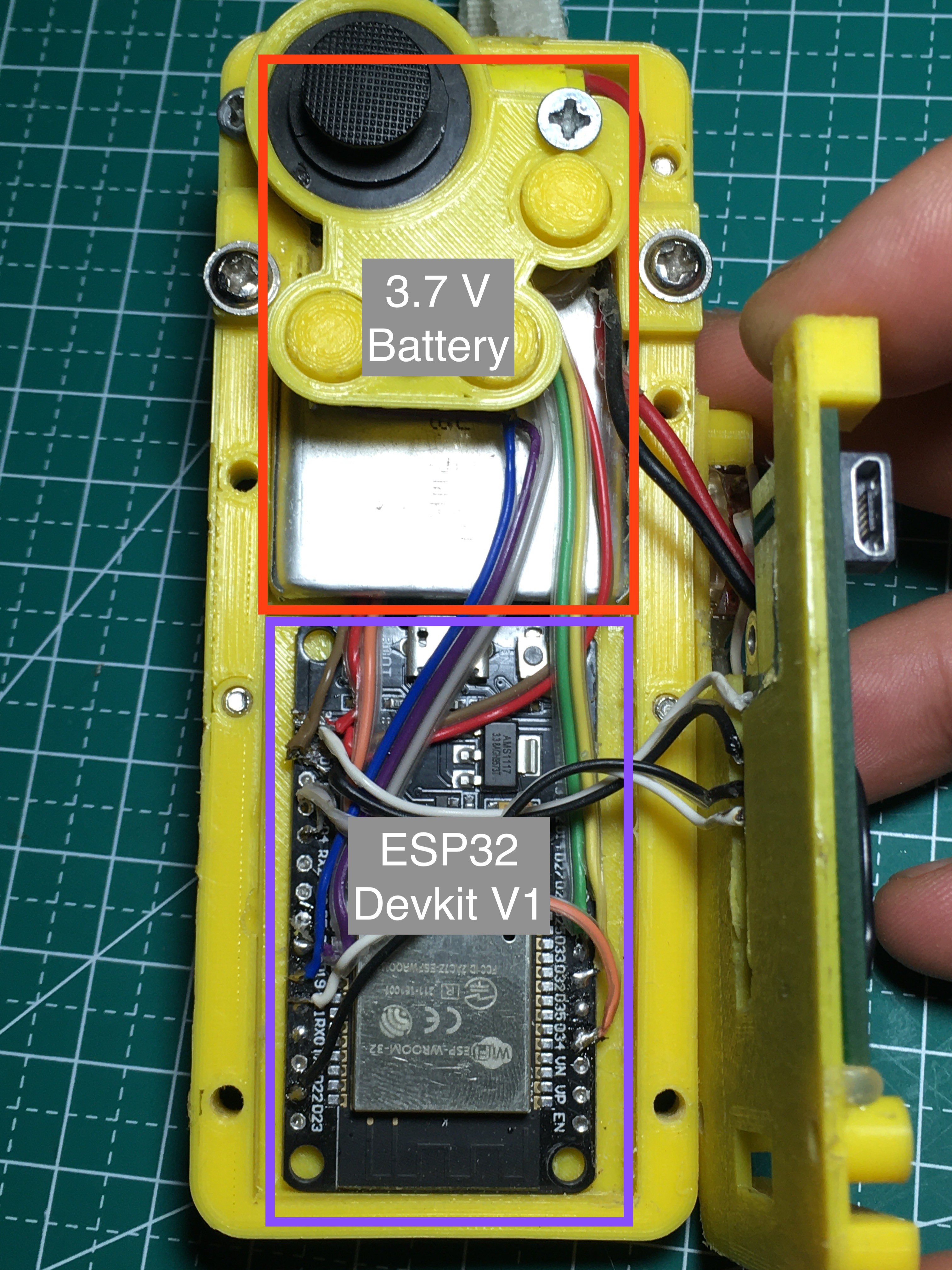
This is a ESP32 dev kit v1 bluetooth based controller that can be used with ROS, its rechargeable, has buttons, joystick and 9 dof IMU.
 Maximiliano Rojas
Maximiliano RojasBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 alireza safdari
alireza safdari
 tEEonE
tEEonE
 Jules Thuillier
Jules Thuillier
 Zeke Barsan
Zeke Barsan