 Andrei Gramakov
Andrei GramakovI'm about to finish migration to the ROS. Aside small things, architecture seems crystalized. It looks like following:
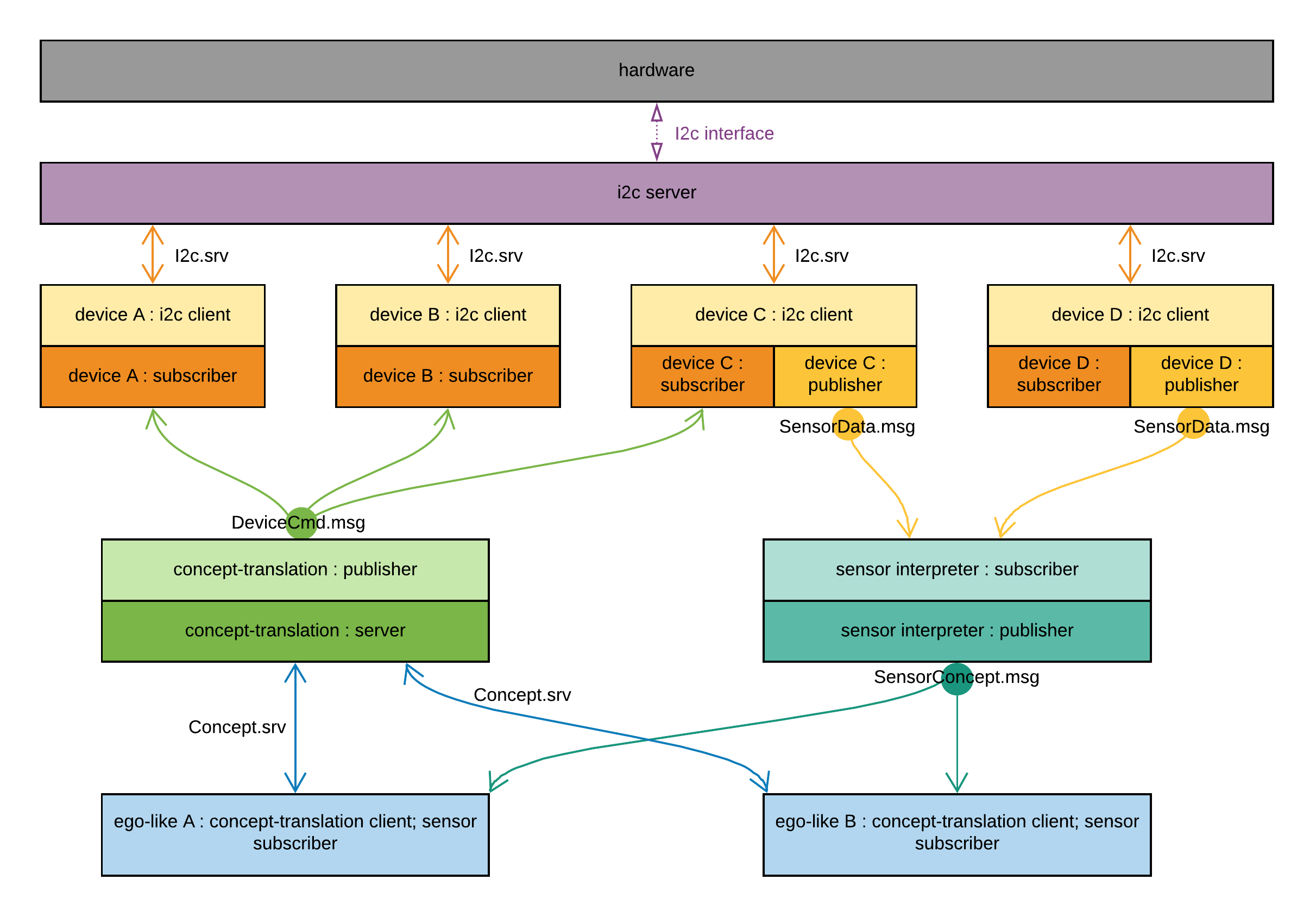
Every block represents ROS-node (except the hardware block). Interaction between blocks is trying to mimic a real brain (as I understand what is happening there).
I'm lazy to describe every node right now, I will write an article when this work will end up with the second demo. But if you interested you can check the code out in the repository here:
https://github.com/an-dr/zakharos_core
More about ROS: http://wiki.ros.org/
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.