 Maximiliano Rojas
Maximiliano RojasThe cad design is int the files section, the extension is .123d that belongs to 123d design, like the "father" of Fusion 360, so, you may be capable to open the cad in the last program.
The general goals for this design was:
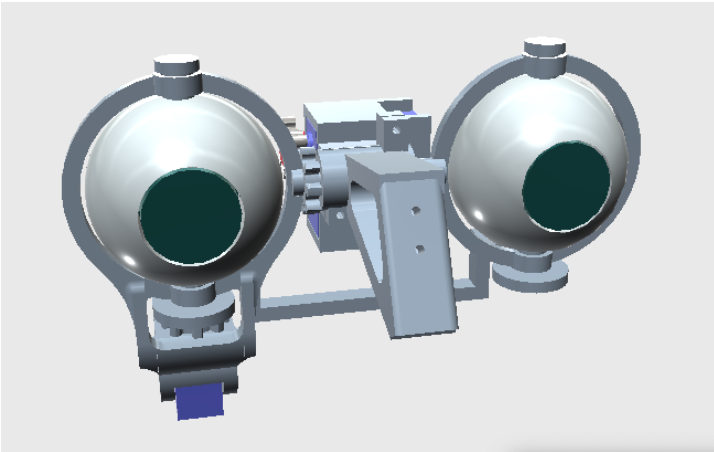
- It must has two cameras with good visibility.
- Reuse some parts like servos and other things from old projects of the robotic laboratory .
- It must be capable of make basics facial gestures (jaw, eye and eyebrows movements).
- The hard must be anthropomorphic.
For the eyes movements two servomotors, gears and links are used, the idea is to accomplish two independent angular movements (up-down and left-right):
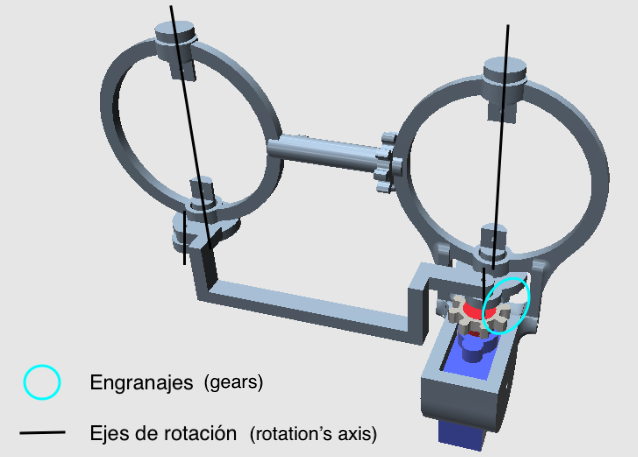
So, for the left-right movements a gear is attached to the servo that move a gear attached to one eye, the other follows the movement through a link:
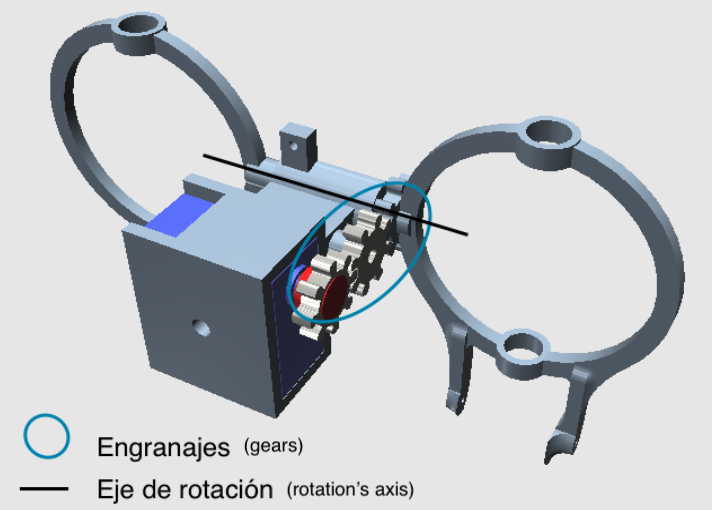
For the up-down movement three gears with 1:1 relation were used:
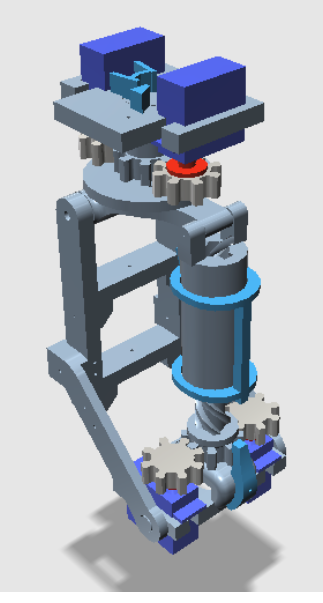
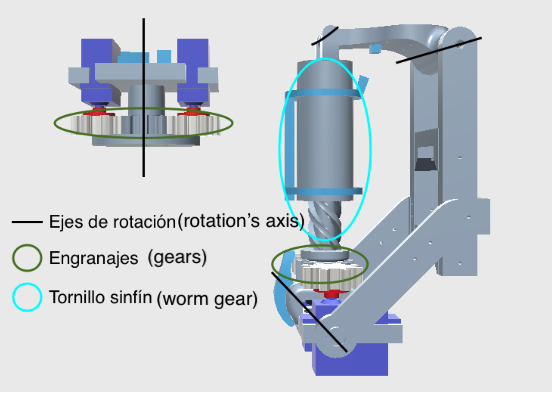
The neck can move in two different ways, the first one is up-down, this can be accomplish through two servos that move at the same time a worm gear where they torque applied is two times of the one of the servomotors, the other movement is left-right, it is done in a similar way, tow servomotors moving one thing. To "sense" when the mechanism is in it limit, buttons are placed in strategic part of the mechanism:
For the mouth movement the jaw is driving by two servomotors through the simplest mechanism, two couple of gears with 1:1 relation:
The eyebrows are moved by one servomotor each one, the joint is very straight forward:
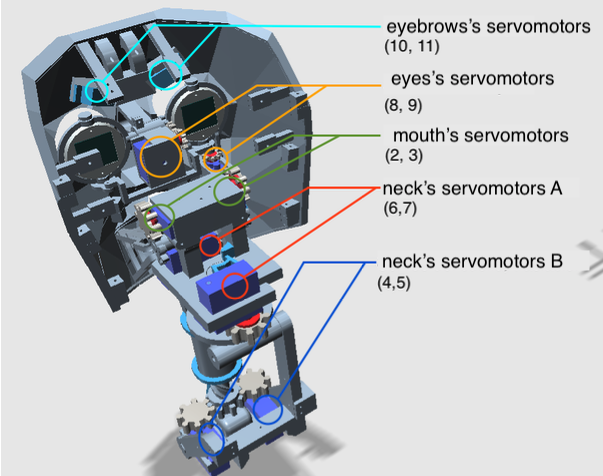
A general view of the place of the motors are presented in the next image:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.