 Noeël Moeskops
Noeël MoeskopsThis is the entry video for the Hackaday Prize 2020. It briefly shows the history of the project, the current state and the concept behind it. I hope you enjoy!
Challenge
Monitoring and observing life is an important aspect of getting an insight on the current state of animal life and if they are in danger of extinction. This can however be a difficult process to do if the life you are trying to monitor is in difficult to reach places, or even hazarded environments to humans like deep water bodies. The ocean is a very fast place with many species that may suffer the hardest from climate change. Therefore, it is important to monitor, inspect and preserve them as much as possible. From the tiniest sea creatures living on the bottom of the ocean to the school of flying fish. Currently, doing so is an expensive operation and require a lot of human labour and expensive equipment like ROVs (remove operate vehicle). A marine expert has to be present to analyse the data and draw conclusions. To do this in a continues matter would be a very cumbersome and expensive task. As new equipment for monitoring is being developed it may be difficult to adapt the already existing hardware to these new equipment.
Solution
I propose a low cost, highly modular ROV: Aruna, with specialized equipment that can be used for underwater monitoring and marine research. The ROV can have a wide range of sensor and equipment such as:
- Camera: This is not just useful for taking pictures and as a visual guide for controlling the ROV, but it can also be used in conjunction with an artificial network to automaticly detect fishes and counts them without user interference.
- Soil sampler: To inspect life at the sea floor a sample of the soil can be taken with the ROV. For later (or on-board) analysis.
- Water sample: To monitor the microscopic particles in the water like plankton or micro plastic particles. Samples can be taken from varying depths for further analyses.
- Tag system: tagging an animal to monitor its behaviour or dropping a node on an interesting side for continues analysis to be later retrieved.
- Microphone: for monitoring whale activity.
Any other equipment can be easily introduced later because of the modular nature of the ROV. The ROV was designed with modularity in mind, so it can be easily adjusted to the desired situation. The current design has 5DOF (degrees of freedom) using 6 propellers. Adding two extra propellers can be used to get full 6DOF. The model can also be substantially changed by converting it to a glider model, so it can be more effective on longer missions with greater distances where high mobility is not required. The high modular design of the ROV allows for all these adjustments and is at the heart of the implementation of the device.
Aside from the monitoring sensors described above a number of other sensors are to be used for navigation like gyroscope, pressure sensor, accelerometer, GNSS, compass and sonar. The goal is to allow the ROV to complete a mission with as little human interference as possible. Thus, the user can choice to deploy multiple ROVs at a site which all perform a set mission and communicate their findings back to the user. This could also happen periodicity so that a continuously monitoring function can be achieved. The user may also choice to manually control the ROV for precise missions, this is the current focus of the project.
Technique
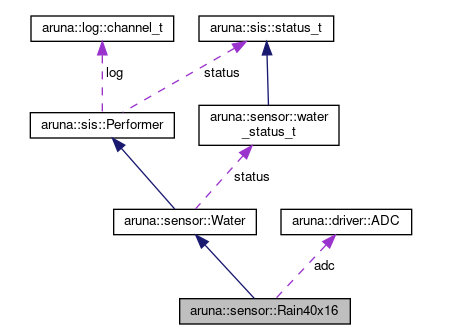
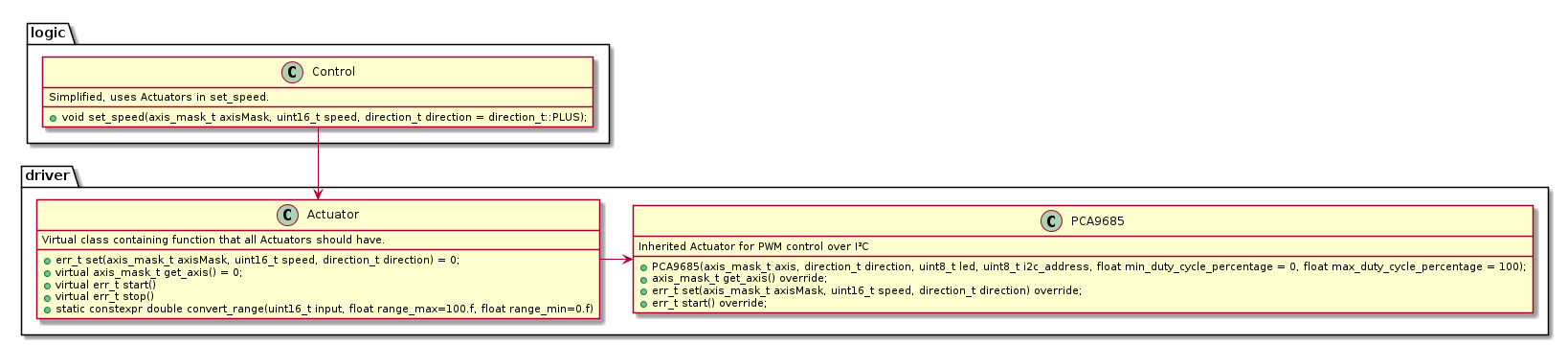
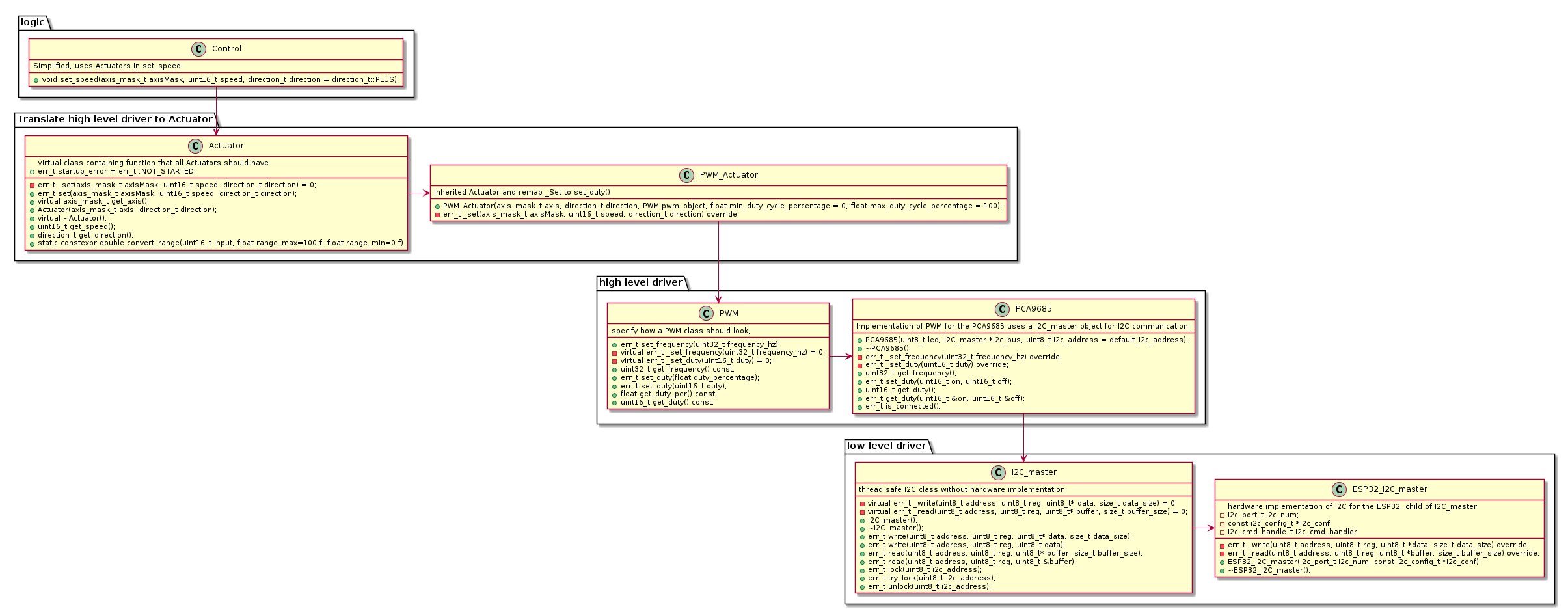
Software
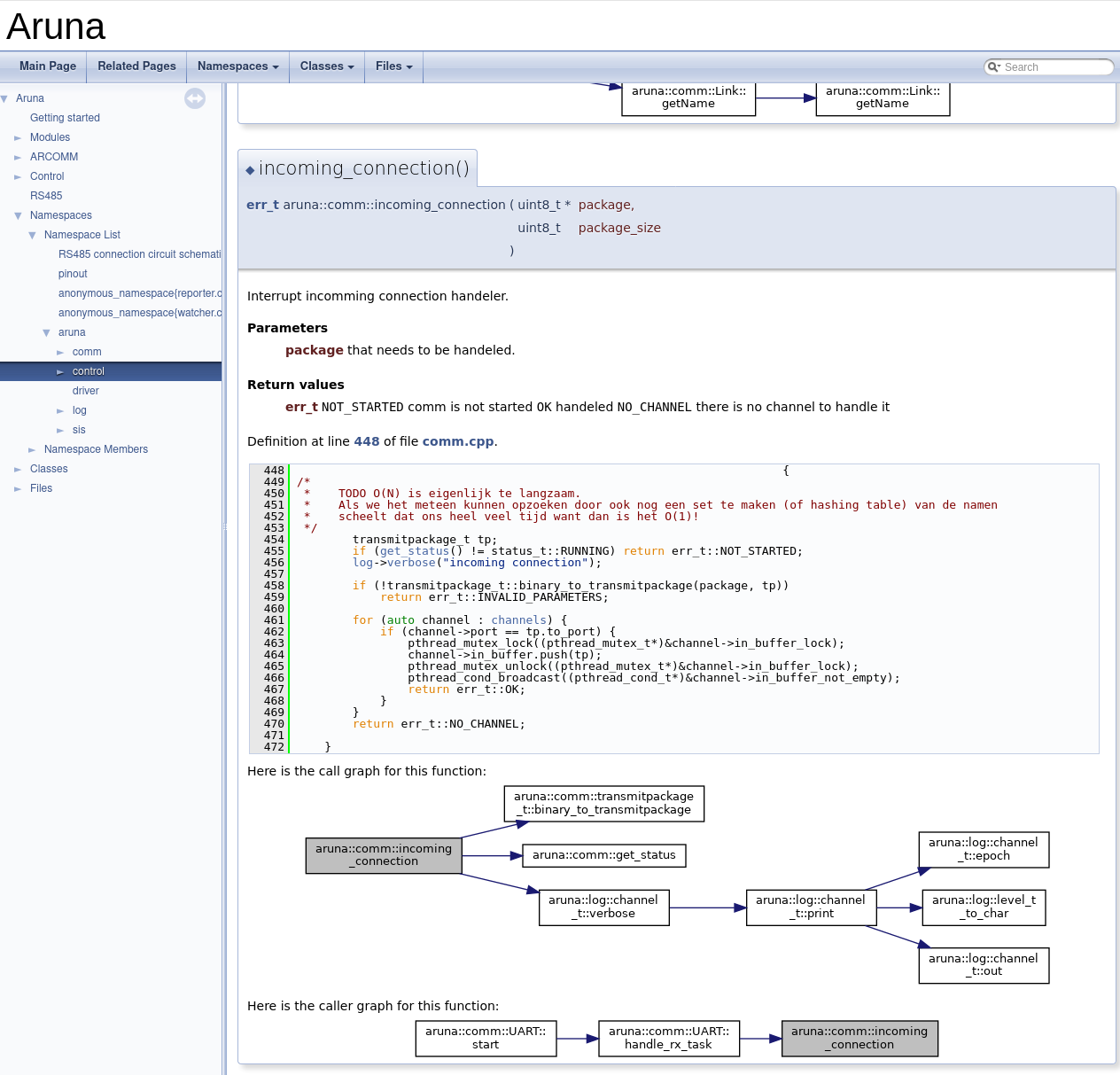
At the base of the project lies the Aruna C++ library. This library is build of multiple modules. The goal of these modules is to be written portable so that they may run on any platform. Beneath the modules are drivers-interfaces. These are abstract classes that divine the behaviour of the platform specific drivers. These are platform specific and need to be rewritten for every platform. Aruna currently has full support for ESP32 (using ESP-IDF 3.2.2), there is partially support for Linux. And lastly, planned support for...
Read more »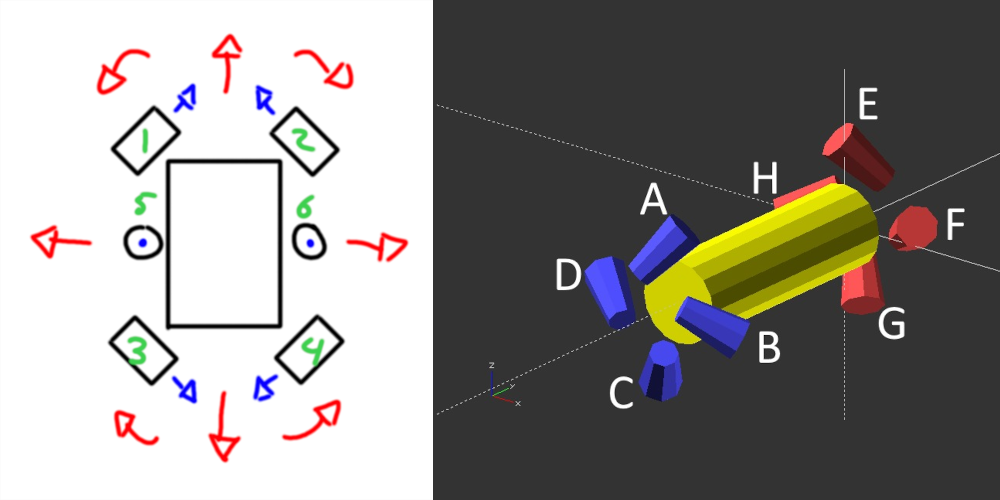

 williamg42
williamg42
 Craig Watson
Craig Watson
 Blecky
Blecky