 Josh Starnes
Josh Starnes2020 Wildcard Mission Challenge
We had a tornado , or rather several come through devastating the community in East Brainerd , Chattanooga, TN . The fiber optic lines are back up, but now that Covid-19 has taken such a strong hold on the local economy most of our over 800 restaurants are closed or running take out orders only. So there are also issues with students being able to get an internet account financially as well as availability if they are in a location they cannot get an installation ( think campgrounds ). The city and my employer ( I am a fiber optics technician myself) are working to do everything they can to help get internet to eligible homes, but ultimately there are lots of kids at hotels, Air B&B, relatives homes and camp grounds that cannot get good enough internet to do schoolwork on their school chrome books. So I aim to utilize the Sky Anchor project to help with that. As part of testing, students using laptops in the area we will be testing both with no antenna, USB external antenna and external WiFi antenna client as well.
THE "ORIGINAL" CHALLENGE BEFORE THE TORNADOES
I love robotics and look forward to creating more public service robots like grounds keeping and security robots, that being said they benefit heavily from a high speed internet connection with unlimited bandwidth. Telemetry, GPS tracking and video recording are all essential aspects of robots in public or robots that operate without up close supervision like a rover. Cellular speeds have been on the decline and there are no high speed unlimited hot spot plans that will fit the bill. I really needed a way to get fast network connections ( and possible open internet connections) to a robot far away and avoid obstructions to check on projects and download data.
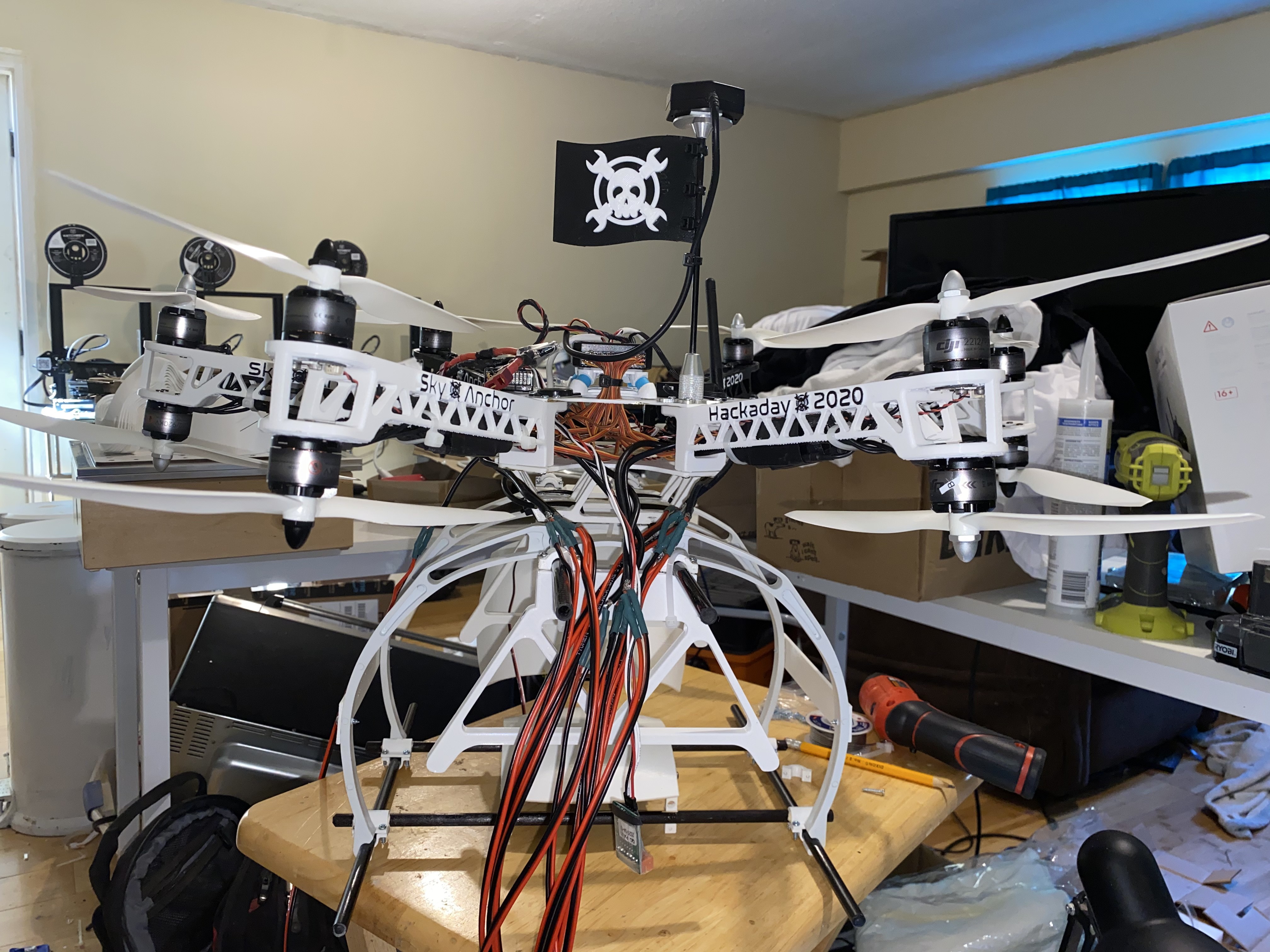
In comes Sky Anchor, this allows myself and anyone else who duplicates this project to have a rapid deployment sky born communications for both Software Defined Radio, Long Range High Speed WiFi ( below the drone) and the ability to target a robot or AP off in the distance. a three servo gimbal locks onto that direction and angle and adjust if the AP is moving. This is where the smart part of the drone is important using machine vision and SDR to track projects or locations that need a solid internet connection to transfer data. Think of it like a high speed IOT solution for research teams. This could be scaled down to as small as a quad copter with a single lightweight AP on a 220v tether. My idea however is to leverage the power, flight authority and reliability of more rotors, hence the Dodeca Hexa frame.
This Projects Mission is to Provide an OPEN BUILD, 3D Printed parts, using OPEN Hardware and Open and /or free software for the maximum repeatability. Sky Anchor empowers amateurs to have an instant sky platform for instant long distance communications. All 3D FILES WILL BE UPLOADED AFTER THEY HAVE BEEN TESTED AND FOUND SAFE TO USE IN THE COURSE OF DEVELOPMENT.
Special Features
1. Ground Facing Machine Vision Tracking to compensate for GPS drift. On the Ground there is a beacon the camera tracks, giving the computer info to adjust position relative to the ground.
3. Camera and Antenna Gimbals Targeting system, Machine vision sees a light in the distance and locks the antenna angle on that long range target. This keeps alignment in the event of heavy wind.
4. Dodeca 12 Rotor drone, Custom 3D Printed arms and mounts to double up the motors and props on each arm. This gives Sky Anchor 12 props and 12 motors for exceptional lift and control authority in heavier winds
5. RGB light ring around the Drone, not only is this for visibility ,but someone who needs to align their antenna towards Sky Anchor can easily see it in a "North Star" approach.
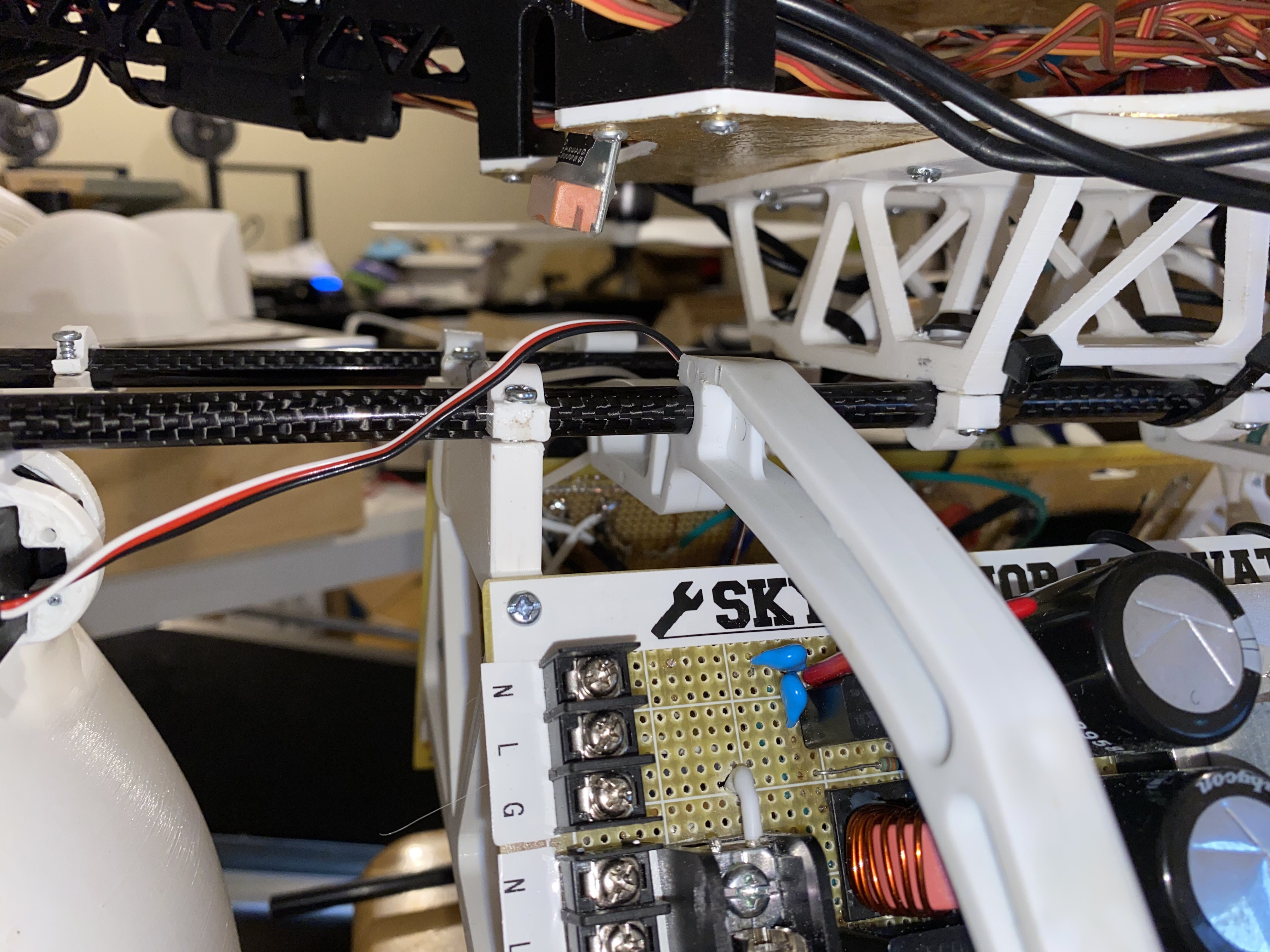
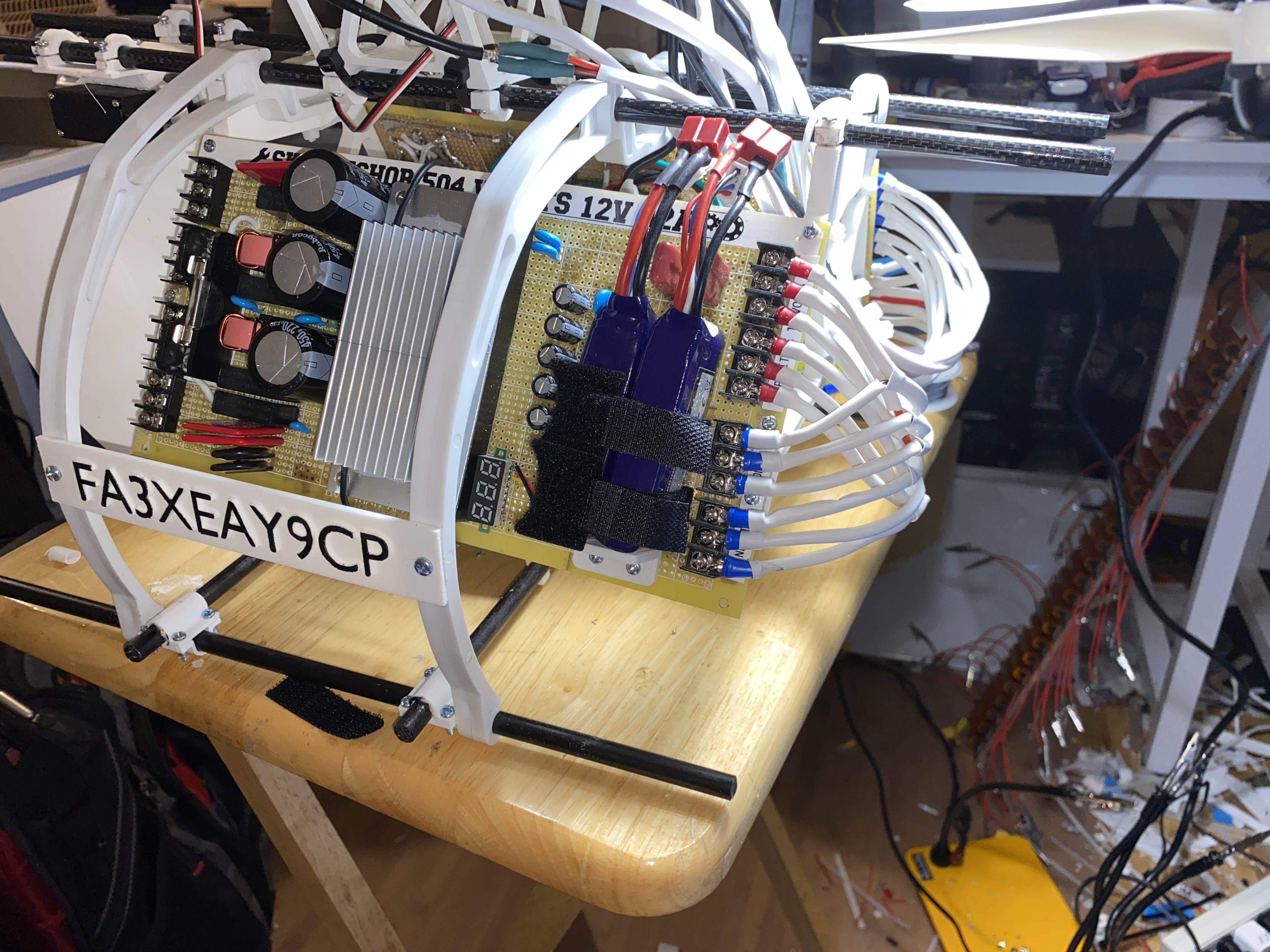
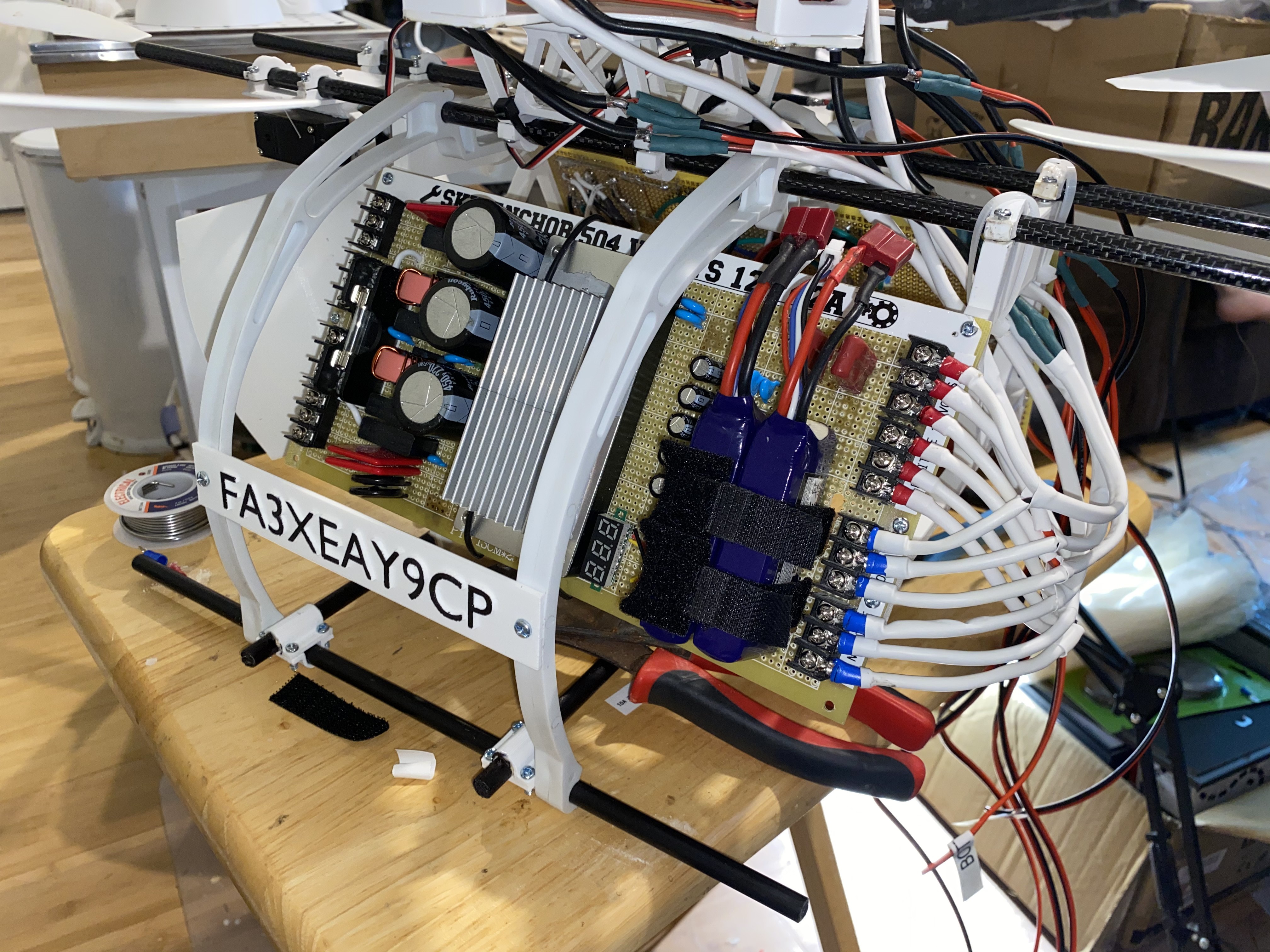
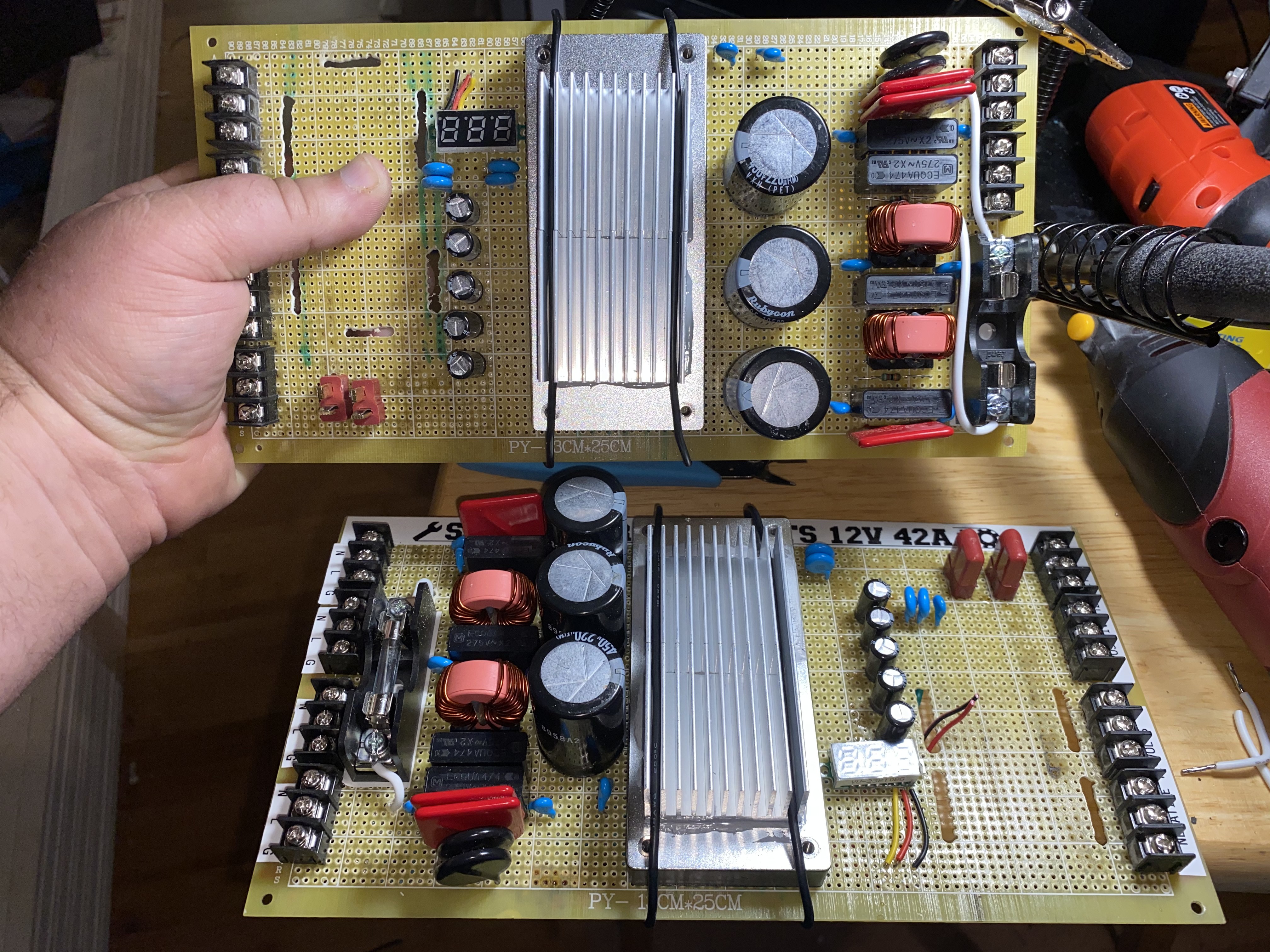
6. 110-240v power tether from ground to the drone
7. Cat5E shielded cable from ground to drone.
Judging Criteria Response
i. Concept-
A. Is the...
Read more »



















 alnwlsn
alnwlsn
 Jake
Jake
 Roddy "Rags" Read
Roddy "Rags" Read
 ServError
ServError
https://www.youtube.com/watch?v=0XiAXQbfULk&feature=youtu.be
If you still care, we got this done a couple weeks ago :) it works. SMS only though.