 Harry Gao
Harry GaoCode and 3D Files:
Quick disclaimer that the drone I made has no real advantages over a normal quadcopter. My main goal while building this was to make something cool and a little bit different. Overall, the process of building this was really enjoyable and I think the final product looks pretty cool.
(Skip to around 8:05 to see it flying)
Design Process
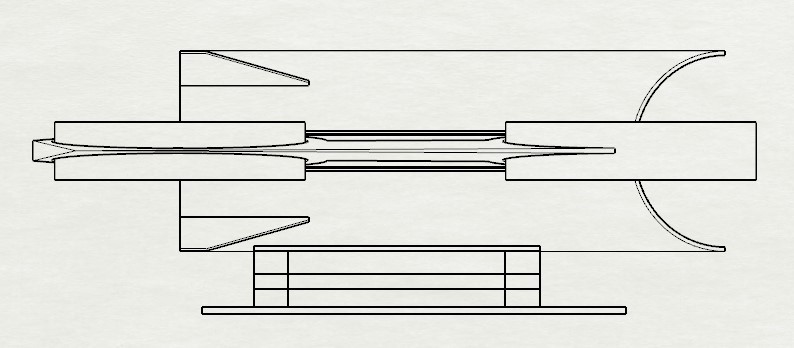
The basic premise of this project was to create a drone that essentially combined a quadcopter with a propeller plane. This is a rough concept sketch I made:
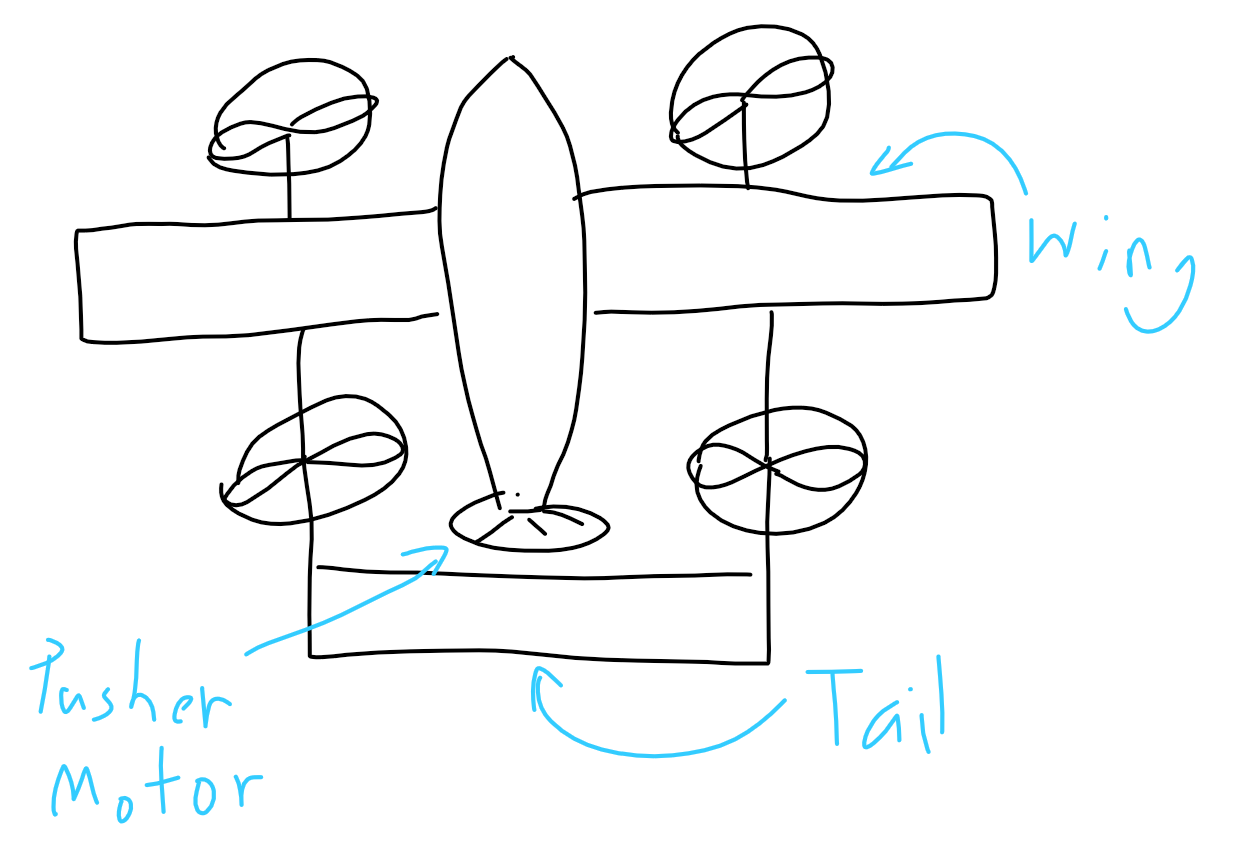
The design of this drone clearly different from most other drones. As you can clearly see, there's and extra propeller mounted in the middle. This propeller gives the drone forwards and backwards thrust. While a normal quadcopter goes forwards and backwards by changing its pitch, this one does it by using the thrust from the center propeller.
You'll also notice the wings and tail in the sketch. In theory, if the drone had wings, the 4 quadcopter motors would be able
This are the final CAD models
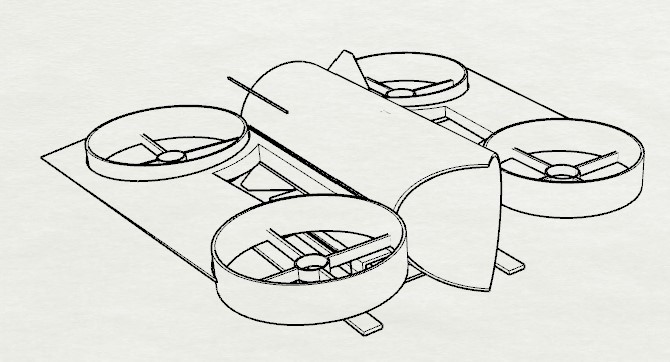
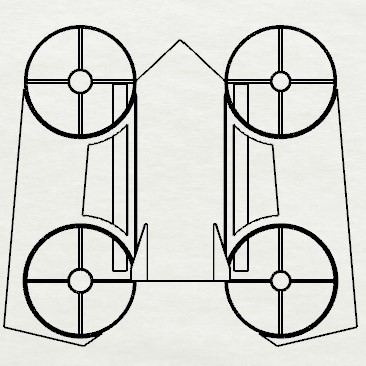
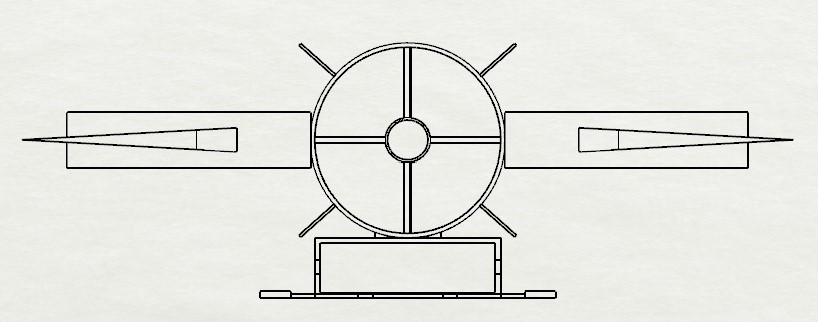
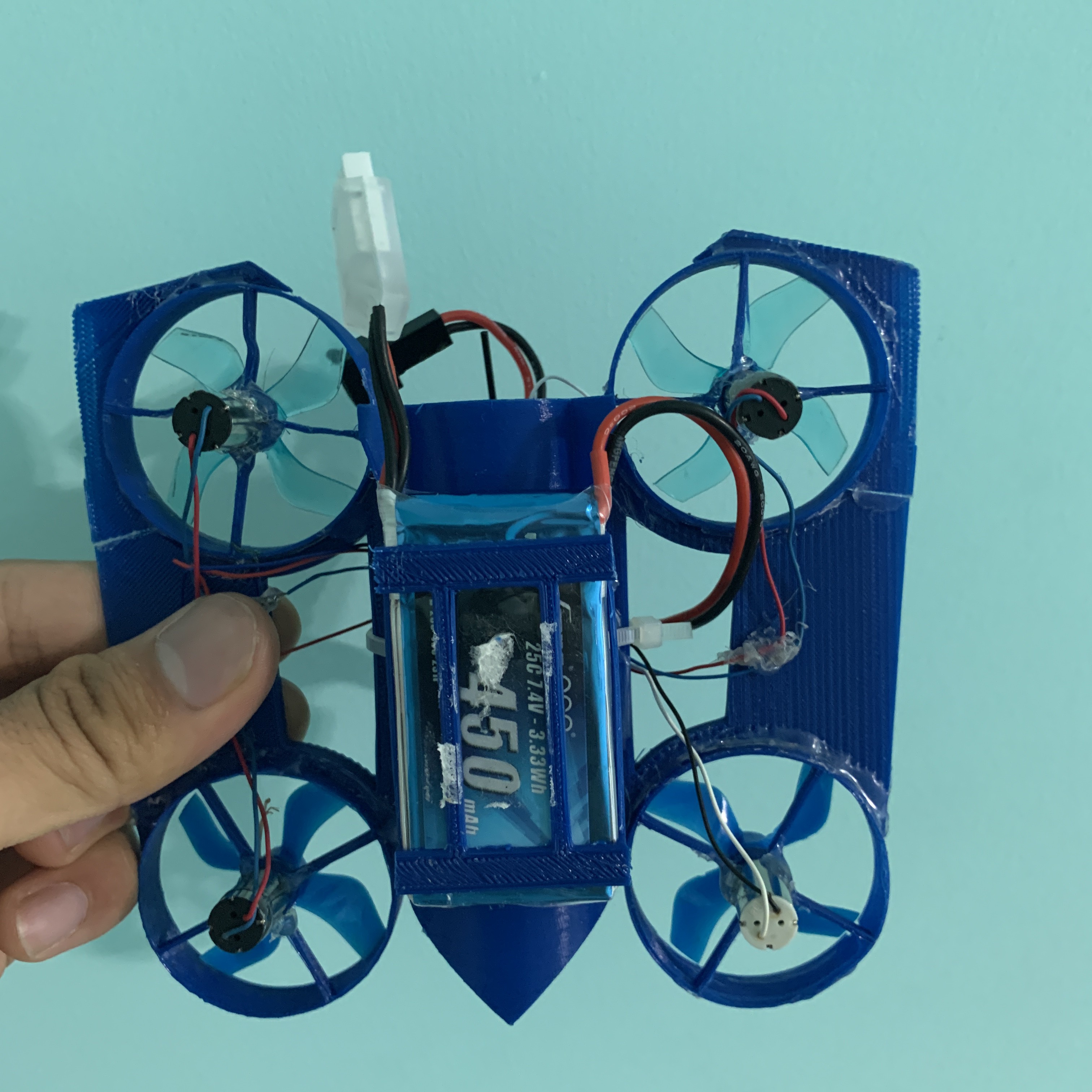
I 3D printed all of the components for the body.
Most of the electronics I used for this project were left over from other projects, with the exception of the flight controller and propellers. The motors I used were 8.5mm brushed motors.
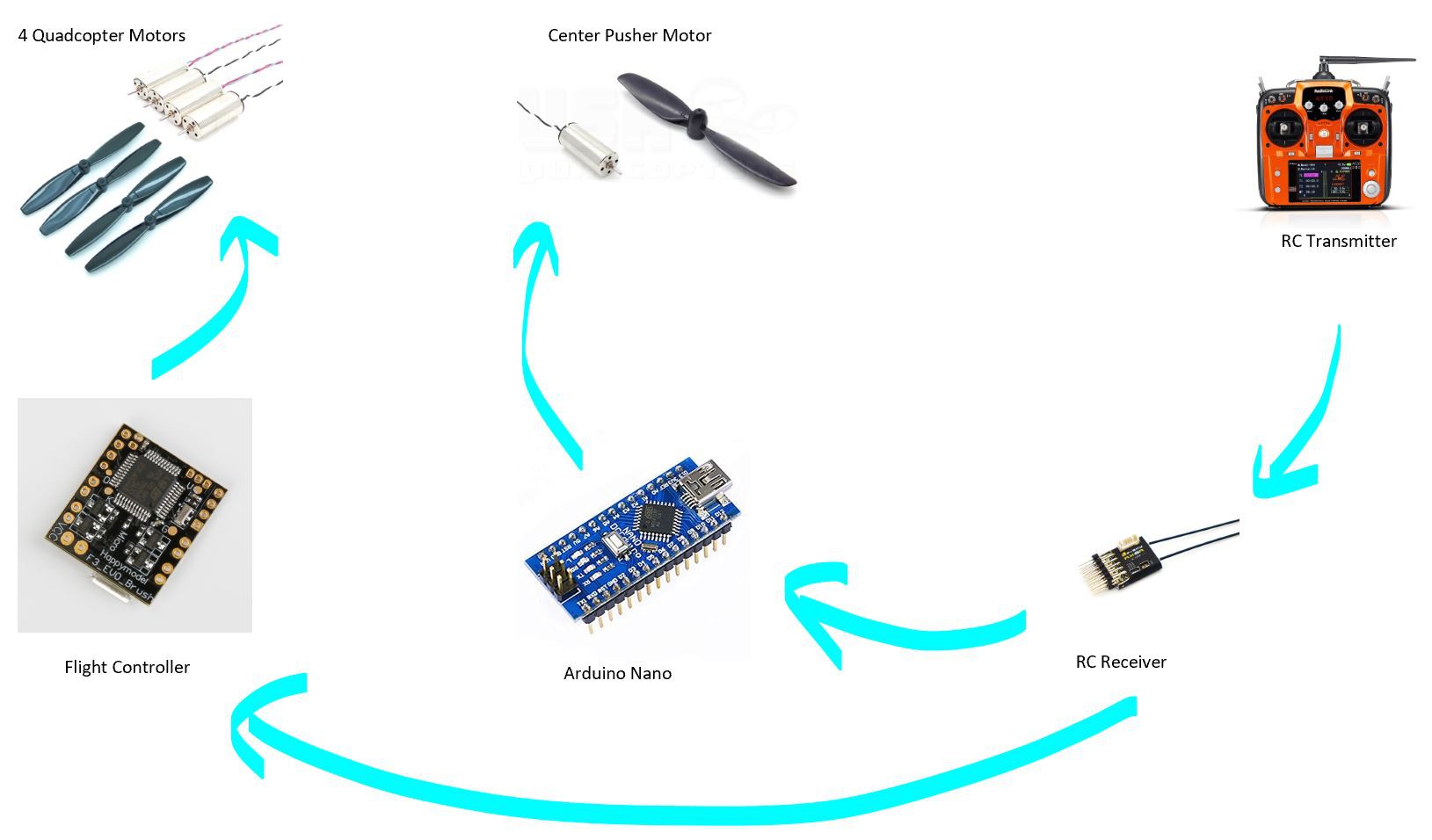
This drone is controlled with a RC transmitter and receiver.
The quadcopter portion of the drone is connected to a standard flight controller, which receives signals from the RC receiver.
The middle pusher motor is connected to an Arduino Nano, which also receives signals from the RC receiver.
Here is a basic diagram of the electrionics:
To power the entire thing, I used an old 7.4V 350mAH Lipo battery, which was mounted on the bottom:
The software I use to configure the flight controller was Cleanflight. I configured the flight controller to act as a standard quadcopter. It required a bit of calibration, but at the end it worked great.




 Tobias
Tobias
 Sam Baker
Sam Baker

 Benjamin Prescher
Benjamin Prescher
Thought this was an ROV/submarine at first glance. Maybe with a little waterproofing on the electronics...