 David Gonzalez
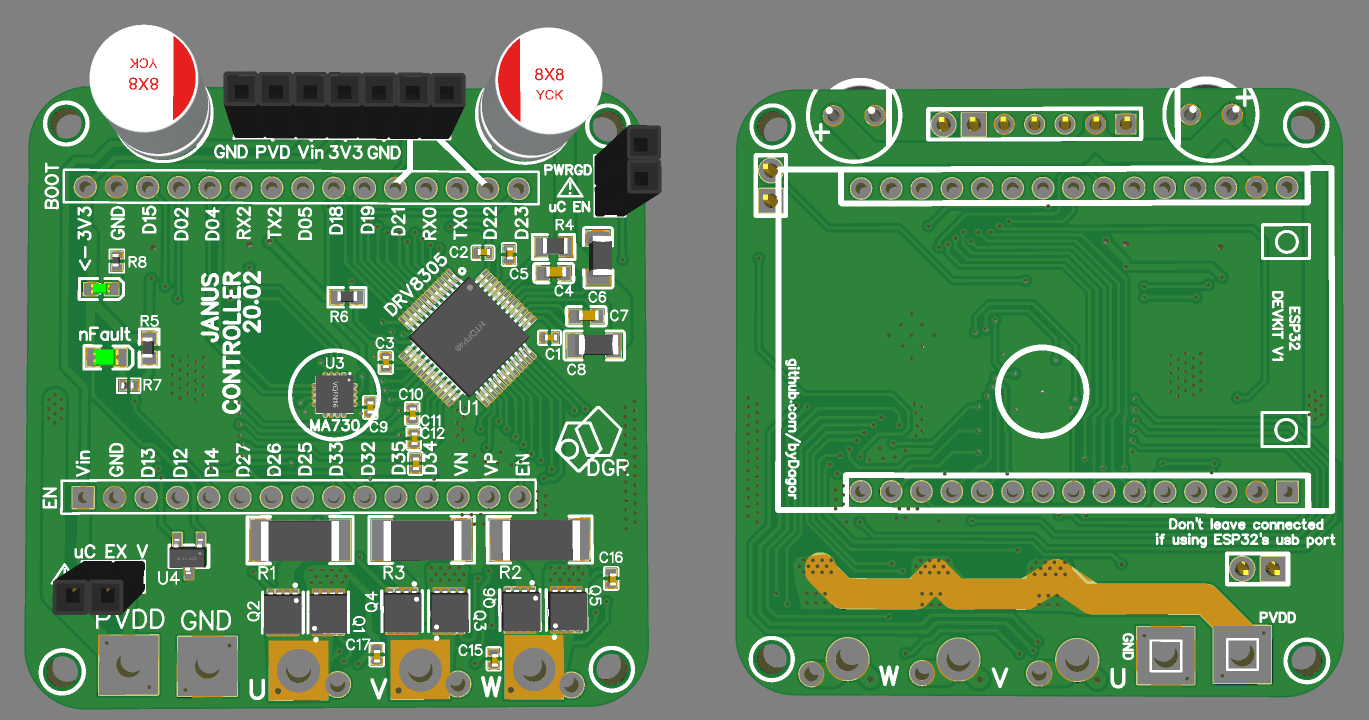
David GonzalezThe Janus Controller is a Brushless motor driver with an on-board magnetic encoder, a three-phase MOSFET driver, three MOSFET half-bridges, a temperature sensor and current sensing resistors.
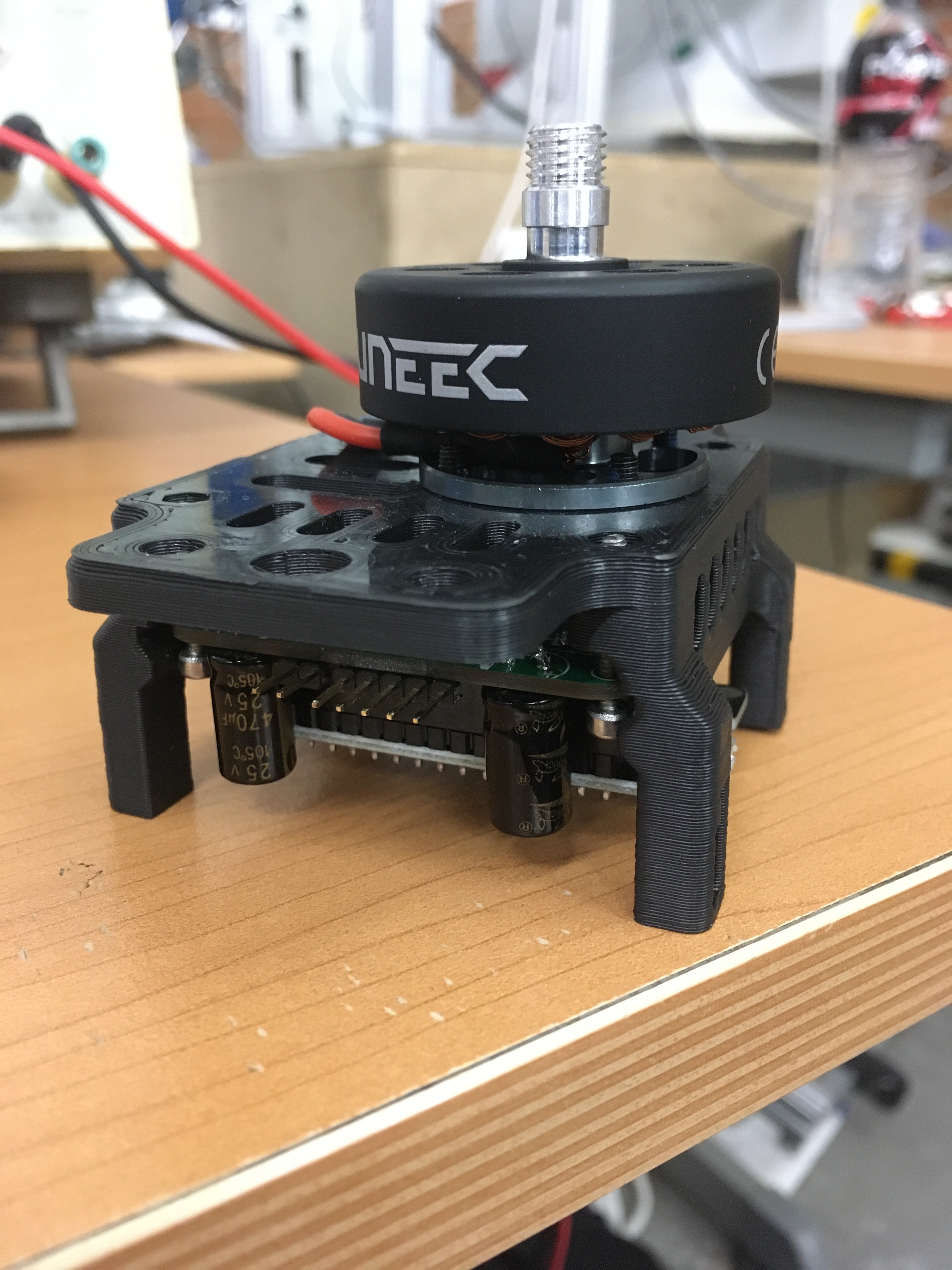
Janus Controller was designed to work with the ESP32 Dev-Kit1 as a shield so that the programing of the board is easier for hobbyist and students, and to bring down the overall price of the board. This board can be used to drive brushless motors as an open-loop system or use the on-board encoder to drive the motors as a closed-loop system and use more complicated algorithms, such as Field Oriented Control for position and velocity control. I recommend using the Simple FOC Arduino library as it has shown to work perfectly for position and velocity control and is easily implementable, but you can always use your own algorithm.




 Jason
Jason
 Lex Kravitz
Lex Kravitz
 Ben Lim
Ben Lim
 hebel23
hebel23
What are these mistakes? How to solve this problem? thank you!
E:\xxxxxx\esp32\Janus-Controller-master\JC01F05\JC01F05.ino: In function 'void setup_MCPWM()':
JC01F05:379: error: 'MCPWM_SELECT_SYNC_INT0' was not declared in this scope
exit status 1
'MCPWM_SELECT_SYNC_INT0' was not declared in this scope