 Kenny.Industries
Kenny.IndustriesRoboexotica is a festival where robots are exhibited which makes cocktails for you.
Why? Because future is now.
There, juries from monochrom.at (the main organizers) announce the "Annual Cocktail Robot Award" (=ACRA) since 1999.
This year at ACRA22, my creation won the "Innovation Award", since I am tacking a problem yet unsolved since the last century (1999 is 20th century). Which is how to shake a proper cocktail.
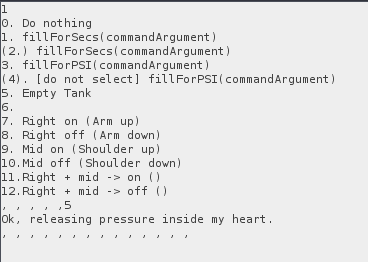
What I realized was, that the difficult part of the shaking-process is not the shaking it self, although it is fairy complicated, but the actually problem is to close the shaker tightly, so that it doesn't spill it all over the place.
"Done is better than perfect" is a mindset which I learned during the past 5 years as an exhibitor at Roboexotica, so to lower the entrance barrier, I decided to build my robots at the exhibition. Of couse, the brainstorming, planning, solving problems and collecting parts happens before the exhibition, since these activities are passively time consuming. So all the parts collected come together and at the end of each year, I got something working, which is the main goal of the event for me.
The event enables me to get into the flow state, where i cannot distract myself with life and I can purely focus on my project.
I also see value in me actually making something there, so people can watch me, making things, which is the very process I enjoy doing, even though I look tired, frustrated and stressed.
And since I have proven my skills, people come to me during the exhibition when they need something fixed or a tool or a part, and I am happy to help, since I believe that the fundamental value of a human derives from actually helping other humans. (See also Yuval Noah Harari oncooperation)
I have been at roboexotica since I was a kid and I visited Roboexotica over many years and I observed the evolution, trends and innovation of robots which would classify as "absurd" in common sense. But I always saw my self actualization in this very field, and I even worked as an actual bartender, to master the craft of making cocktails. There I learned that there are many techniques for shaking, pouring and mixing cocktails, and by making my very own cocktail robot, I can preserve this know how and skill for the future humanity, in which I see value.
I hope that there will follow many more marvellous Roboexoticas and every year, I will keep working on this robot, to serve the "Cup of God" (A perfect cocktail to save your soul. In the sence of the anime "Bartender")
And I hope that you will be able to enjoy it one night.
In that sense, I hope you enjoy my project logs, friends of the night.


 Shifty
Shifty
 Jacob David C Cunningham
Jacob David C Cunningham
 Dan Royer
Dan Royer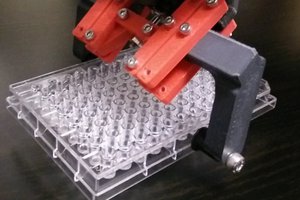
 csabak
csabak
What kind of garnish would you like to see implemented?