 Supercell
SupercellARX MK0PF
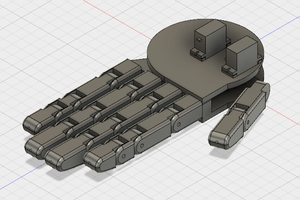
Posable Figure variant which is non motorised and static design. Mainly focused for artistic uses such as in stop motion, display purpose, sketching, sculpting, etc. Most of the joints in the human hand
ARX MK0 Variants
- MK0 - https://hackaday.io/project/167785
Main variant which focuses on a bringing a fairly advanced low cost robotics hand that's compact in design. - MK0S - https://hackaday.io/project/169583
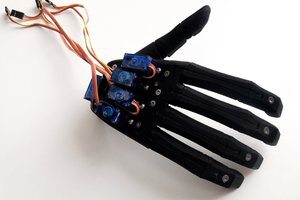
Servo variant which focuses on being an easy to develop robotic hand using standard servos which can be easily sourced and controlled - MK0M - https://hackaday.io/project/169585
A purely mechanical driven design with slip differential fingers actuated with a single cord. Mainly focuses on reliability at a low cost along with reduced complexity without sacrificing functionality
3D Printing
The ARX Hand Project can be printed using any standard FDM printer that can print PLA. Majority of prototypes I have printed are in PLA using a fairly modified RepRapPro Huxley 3D printer purchased in 2014. The design has been based around 0.2mm layer height with a 0.4mm nozzle, so using different parameters may affect part fit. Some additional small geometries have been added to the models to compensate for some effects caused by 3D printing.
Typical print specifications:- 0.4mm nozzle
- 0.2mm layer height
- 30mm/s outer perimeter
- 40mm/s inner perimeters
- 60mm/s infill
- +-0.1mm XY accuracy
- 0.2mm Z resolution (layer height)
- PLA or PETG for hard plastics
Disclaimer
Although I have some experience in design things from being self taught, I do not have any degree or qualification. These designs should therefore not be used as a medical device or to be used in any situations where it may cause injury or harm. I can not be liable to any injuries, harm, or issues resulting from the use of the design and therefore should only be used at your own discretion.
License
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
 Ric Real
Ric Real