0%
0%
Hobby servos quadruped robot Build
Building quadruped robot
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 tab
tab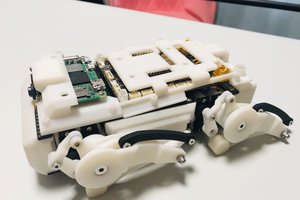
 GEEKROS
GEEKROS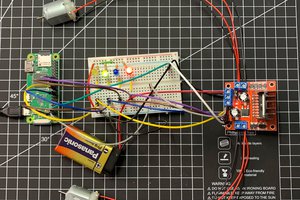

 robotmaker team
robotmaker team
Thank you for the reply. Each servo position is adjusted by "angleToPulse.py" and checked by "servo_calibration.py". Try to run my robot with "robot_main_RPI.py". I did not touch on other programs, except /dev/input/event*. Do you have any tweet on other software ?