In the previous log, I explained how I had got basic closed loop position control working on version 2.0 of the dual motor controller. Profiling showed that this update worked as intended, and the performance is vastly improved. Instead of a 500Hz control loop, this runs its controllers at 4000Hz (including motion primitive planning) for smooth motion control. It was a big jump from a Microchip Cortex M0+ to a STM32 Cortex M4F microcontroller which I was not familiar with. The previous log noted a few next steps, all of which are now complete:
- Set up CAN bus interface (RX and TX)
- Test multiple devices on a network
- Swap out current sense resistors
- Test and tune current control
- Test and tune Virtual Model Controller
CAN, Dual Motors, and Position Primitives
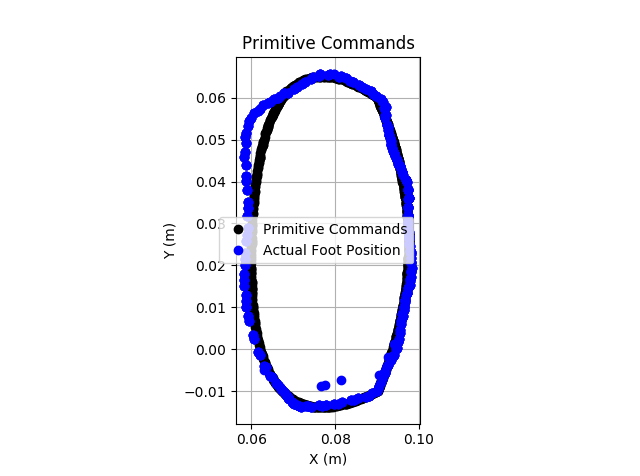
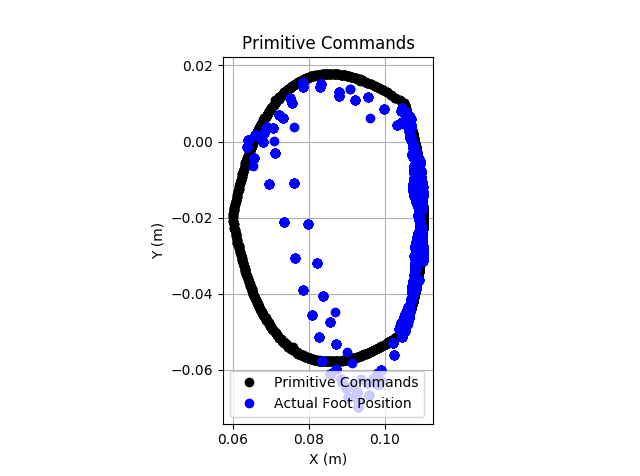
I set up the CAN interface, connected two motors, and attached the ESP32-based robot controller via CAN to this device. I then ran a demo running quadratic Bezier curve-based motion primitives. This worked well, as good or better than V1.X. In this case, the performance seems to be mostly limited by the motor, but the control sounds noticeably smoother. The tracking performance is quite good. The image below is tracking the path with a 1500ms period.
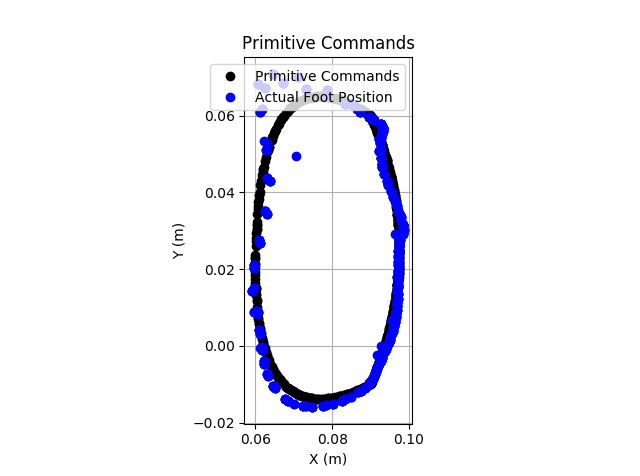
Even moving faster, the tracking performance is quite good. The image below is operating with a 750ms period. There is some limited performance as the foot moves rapidly from positive Y back, but this appears to be a motor limitation more than a controller issue (as indicated by motor saturation.)
Current Control
Version 1.X of this project had significant computational limitations which did not allow me to run current control fast enough to get good virtual model control results. With 8X control loop rate improvement, this version promises improvements in current control. Interestingly, the control loops is now fast enough (4kHz) that it is approaching the frequency of the motor driving PWM (currently 8.4kHz). Therefore, each control cycle sets effectively 2 pulses of the PWM on each loop!
The original current sense resistors were set to 0.24 Ohm, which did not provide enough resolution. I have a 3.0V reference and a 12-bit ADC, so it was not measuring the small currents of these motors very well. I replaced that with 2.14 Ohm resistors, and have much improved resolution. Ideally, this will be improved in the future with a smaller resistor and a current sense amplifier, but it seems to work for now.
The current on each motor is sampled at 20kHz and digitally low-pass filtered. The low-pass filter was designed with a 90% rise time of ~11ms. This current feedback signal seems quite reliable so far.
A PI controller is used for the current control. This controller is tuned to be almost entirely an integral controller, so that the command is ramped up and down and doesn't make major jumps. This seems to work quite well.
Virtual Model Control
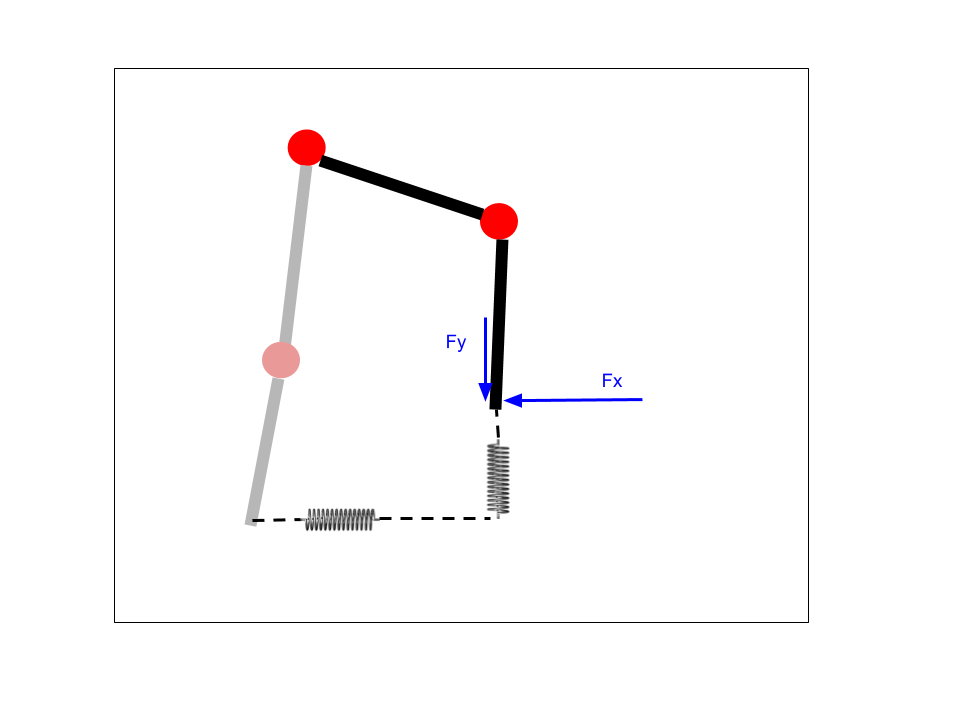
With effective current control, virtual model control can now reliably be performed. As implemented, a virtual spring and damper in both X and Y directions in the cartesian space are connected between the current foot position and some desired position determined based on a motion primitive. The motor torques are determined (assuming no friction and no gravity, which I may account for in the future) using the transpose of the Jacobian. Then, assuming a linear relationship between motor torque and motor current, the torque is applied via current control. The image below shows the basic concept.
While this control approach makes a number of assumptions that may be much less reasonable on these cheap, high ratio gearmotors than high-end motors used in academic or commercial robotics, it does appear to work reasonably well. The image below shows tracking through a quadratic Bezier curve based motion primitive using this virtual model control with a 3000ms period.
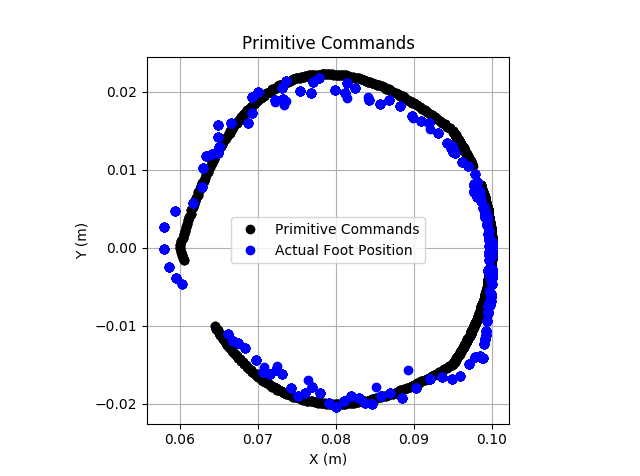
The VMC does struggle with fast movements. While the above motion primitive had roughly constant foot speed throughout the motion, the primitive below moves rapidly "up, back, and down" to return the foot to the start of a walking cycle. By increasing the virtual stiffness or using some look-ahead feedforward term I may be able to improve this performance.
Summary
I am very happy with the results of this new revision so well. With vastly superior performance, it enables more advanced control techniques to be used without worry. There are a few minor additions to the firmware still needed to match the capability set of V1.X, after which I plan to replace the controllers on my quadruped robot with V2.0 and test walking under virtual model control. That will be the closest mimic to advanced robots like the MIT Cheetah that this project has yet achieved.
I also plan to open up the GitHub repo soon, with all code released under MIT license.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.