 Shu Takahashi
Shu TakahashiThe video below summarizes the progress we made after the creation of the first prototype.
Introduction
Magpie MIDI is an adaptive computer accessory for people with cerebral palsy and other muscle control disabilities. These kinds of disorders often have symptoms like impaired movements and involuntary movements. Such symptoms make many of the everyday tasks most of us take for granted difficult and challenging. We believe that if there is one ability that could make these people happier, it’s creative expression. Being able to creatively express ourselves gives us the independence and the freedom we enjoy.
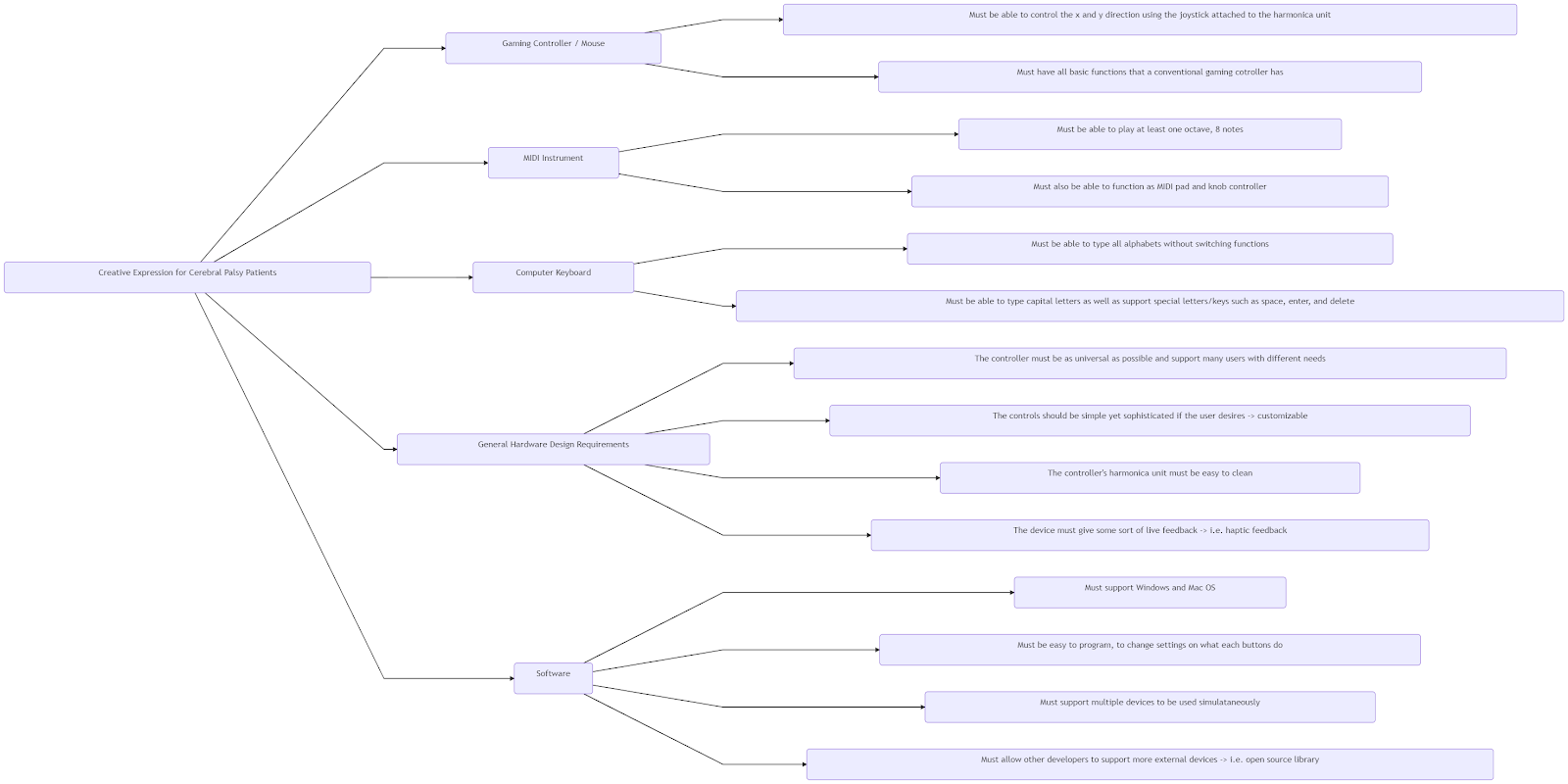
More specifically, we believe that the most accessible way for any of us to express ourselves freely is by using computers and specialized softwares like Photoshop and Logic. However, although adaptive computer accessories do exist, many are expensive, inflexible and are limited in what it can do. Our project aims to resolve all of these issues. It integrates four common computer accessories into one simple easy to use tool: USB keyboard, USB Mouse, Gaming controller, and a MIDI controller.
Be it music, digital arts, writing gaming or whatever else, having all four capabilities in one adaptive device expands the number of tasks individuals with cerebral palsy or other disabilities are able to do on their own.
Core Functions
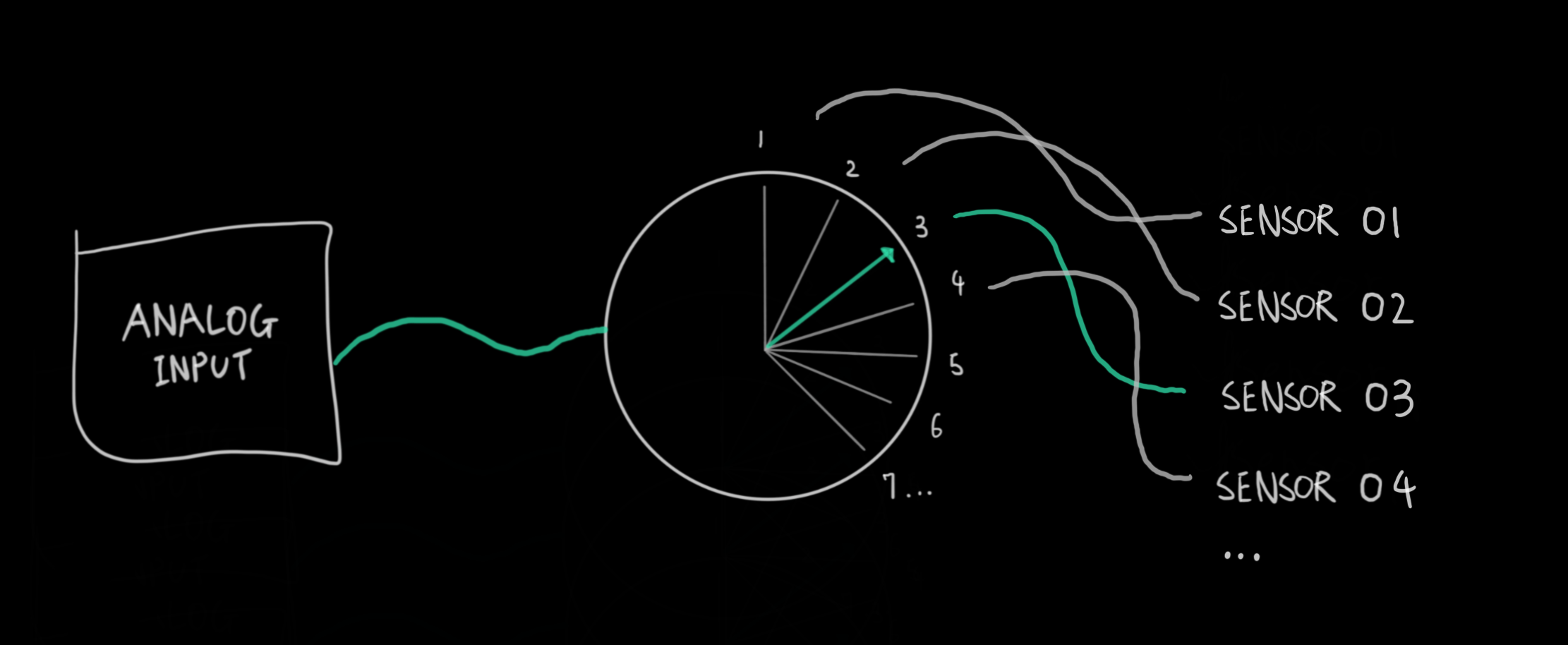
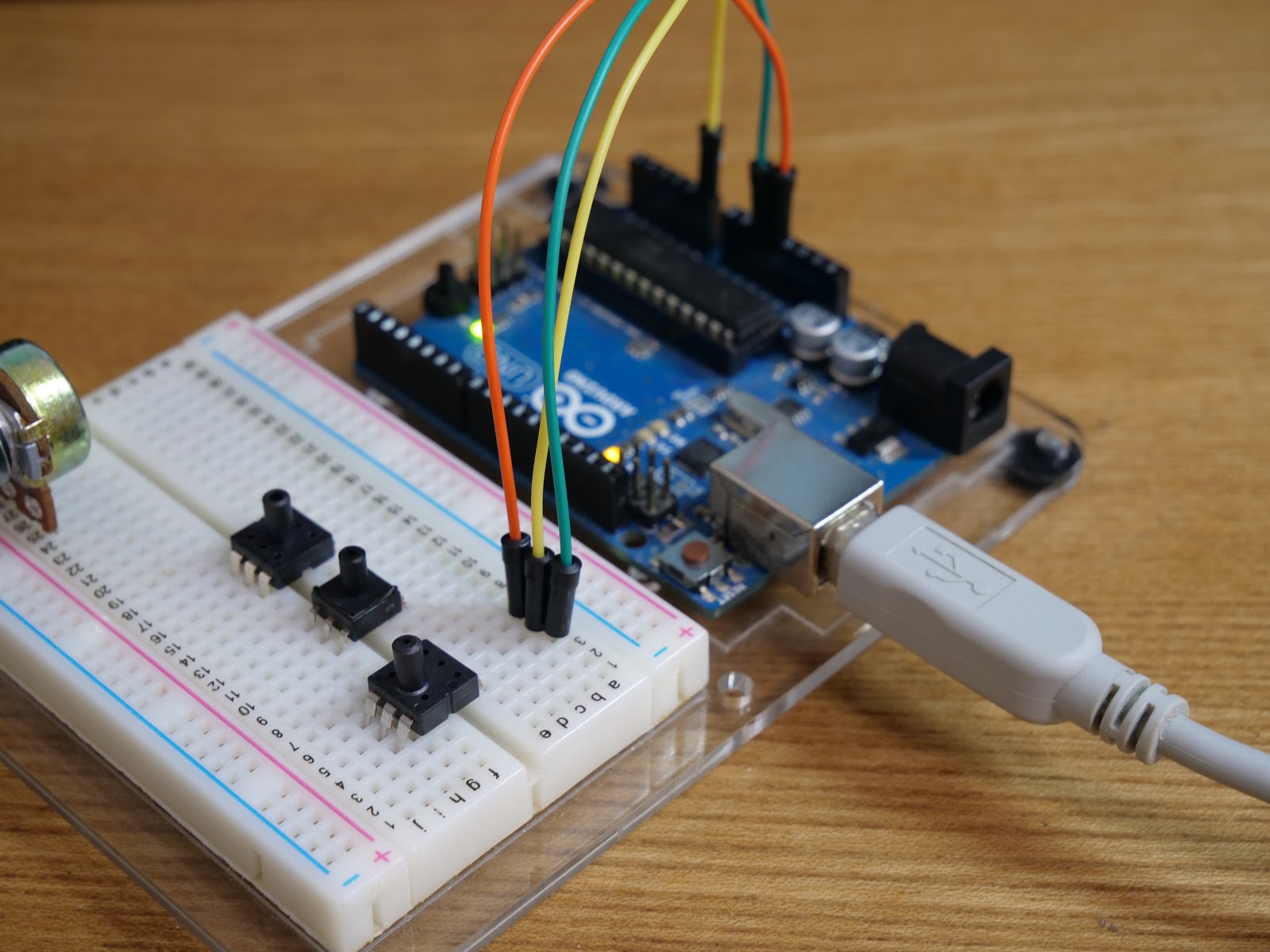
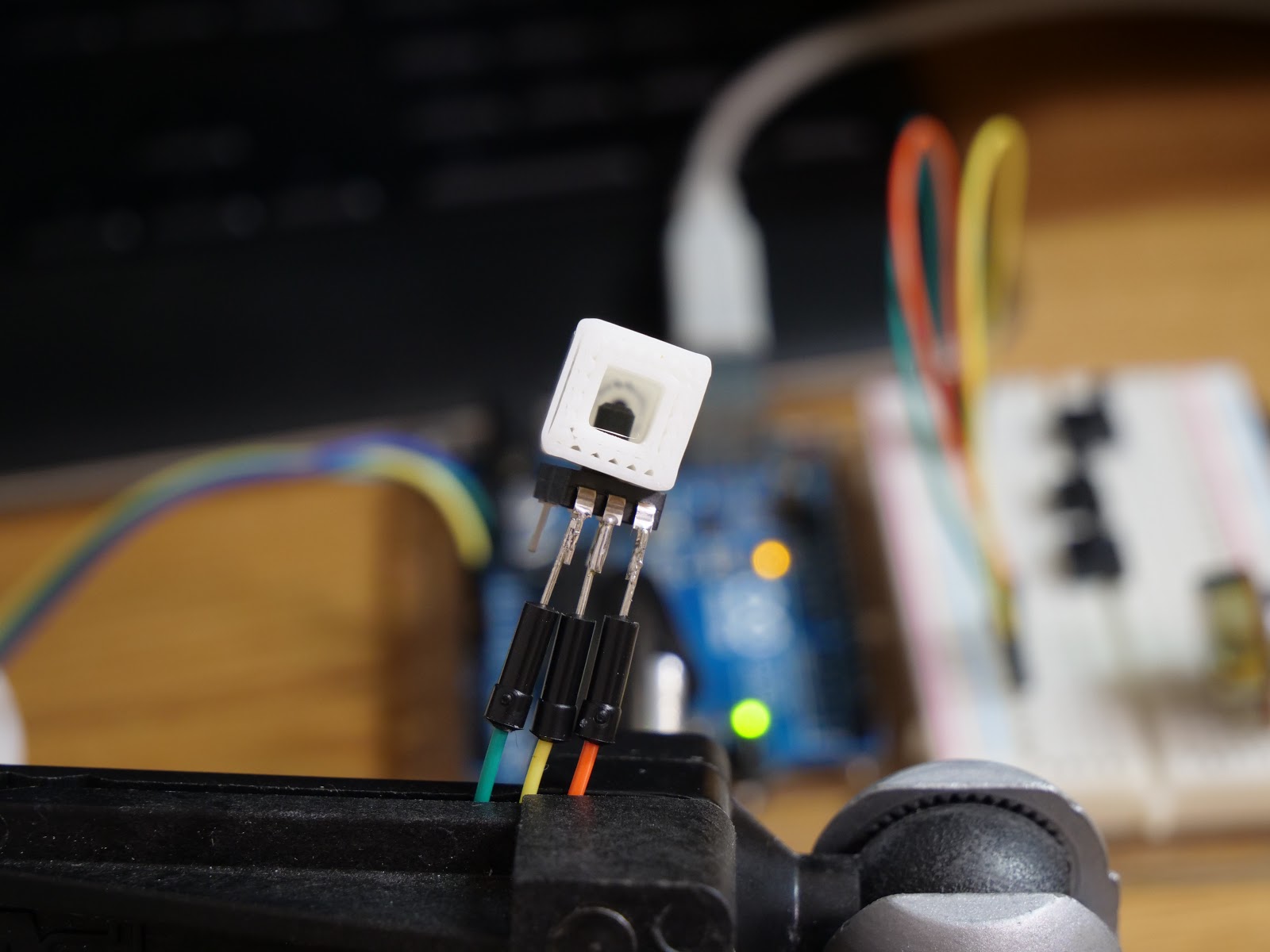
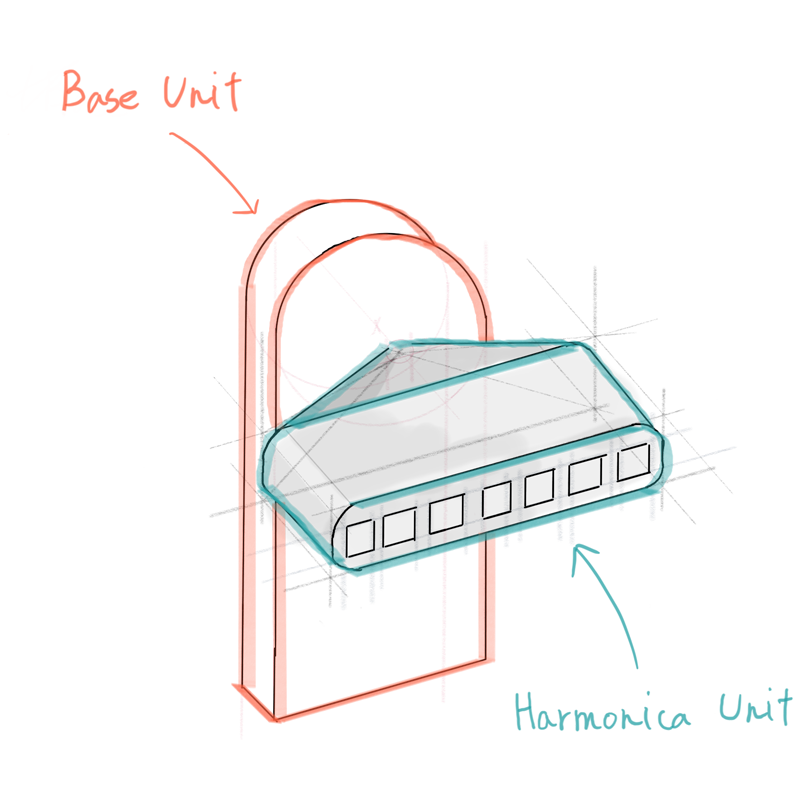
Users interact with the tool by blowing or drawing their breath into the device’s air holes. Each of the air holes can be customized to execute the desired actions depending on the selected functionality.
- MIDI Mode: The Magpie MIDI imitates the functionality of a regular harmonica. At the moment, our device is able to play single notes from C3 to A4. However, by using all the pressure sensors available, upto 26 notes can be played at the same time. We’ve also added a MIDI potentiometer so that it can be used to control sound design parameters such as volume, gain, kill, pan and reverb.
- Mouse Mode: To use the mouse, the user can simply move their head to move the cursor similar to using a joystick. Blowing into the device will left-click and drawing from the device will right-click.
- Keyboard Mode: With the 13 air holes on the harmonica, the user can type out the full 26 alphabet letters without the need for additional buttons or controllers. For example, blowing into the first air hole for example will type out the letter ‘a’, and drawing from the first air hole will type out the letter ‘b’.
- Gamepad Mode: This feature is still in progress, but we are working to make the device able to do everything that a typical console gaming controller is able to do.
Additional Details
- Switching Between Modes: Users will be able to switch between different modes by what we will be calling ‘gestures’. Our idea currently is to make it so that when the user blows air from left to right of the harmonica unit, Magpie MIDI will switch its function. We plan on adding more ‘gestures’ for other miscellaneous tasks as well such as for typing special characters.
- Software: We plan on creating a dedicated software for customizing what each of the airways in the device does. Many softwares require shortcuts such as pressing CTRL and W at the same time. Using the software, the users will be able to program this without writing a single line of code.
- Haptic Feedback: We will be adding haptic feedback to our device. With haptic feedback driven by vibration motors similar to ones found inside phones, the users will find it easier to interact with our device.
- Multiple Magpie MIDI: We want to support multiple Magpie MIDI to be used simultaneously. For example, many MIDI musicians like to have a MIDI keyboard and MIDI drum pad or MIDI knob placed next to each other.
Future Plans and Improvements
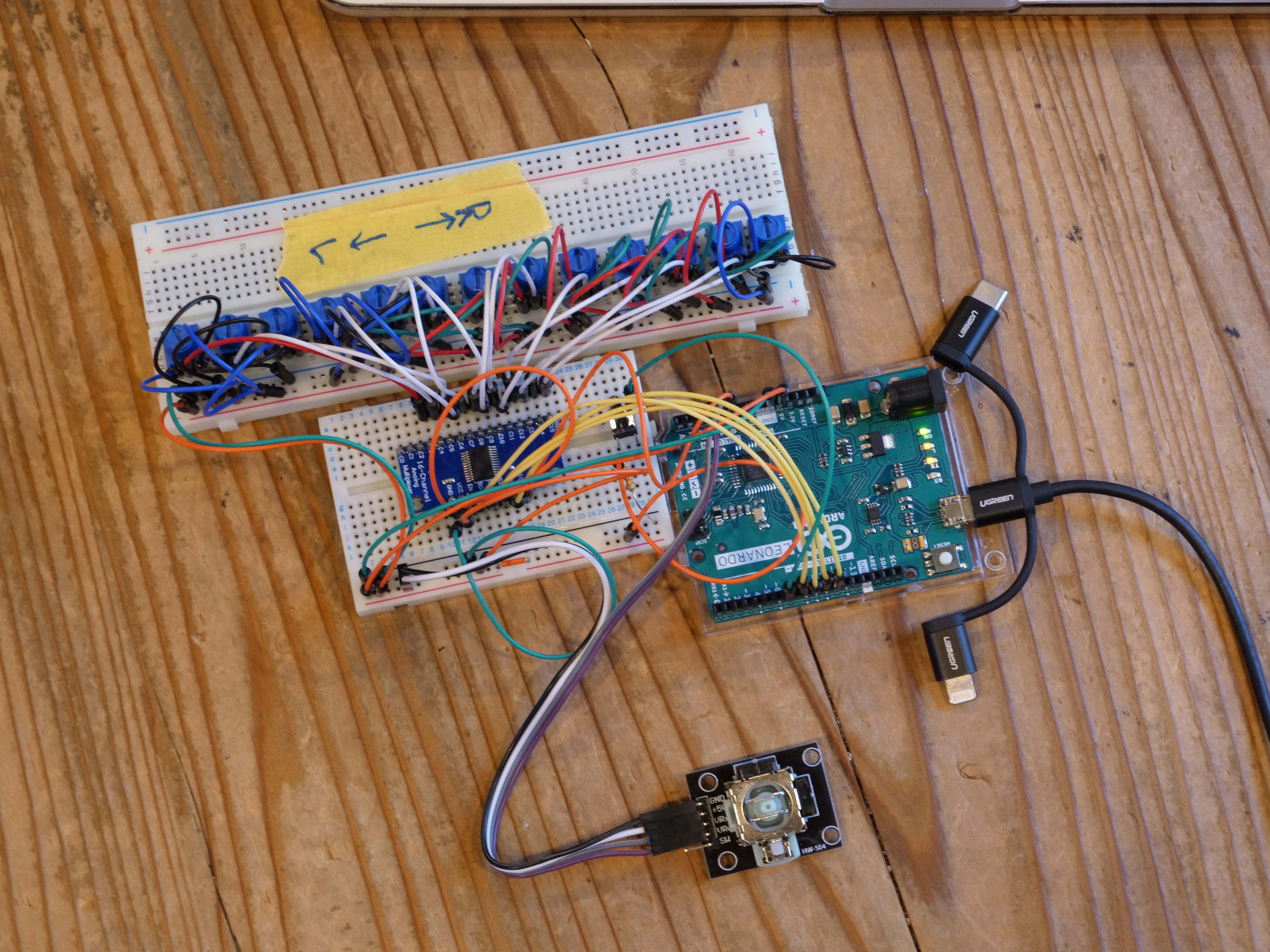
Currently, our device is still in the prototyping stage and is made from 3D printed components and CNC milled circuit boards. We are planning to add the additional features mentioned above and improve the programs for the...
Read more »






 Shu designed a simple air hole to measure different interactions with the sensors. As you can see in the picture below, we chose a square air hole to replicate that of an original harmonica and added a pressure relief exhaust orifice at the back of the air hole. The dimensions of these simulations were also evaluated using fluid dynamics principles (Bernoulli’s Principle).
Shu designed a simple air hole to measure different interactions with the sensors. As you can see in the picture below, we chose a square air hole to replicate that of an original harmonica and added a pressure relief exhaust orifice at the back of the air hole. The dimensions of these simulations were also evaluated using fluid dynamics principles (Bernoulli’s Principle).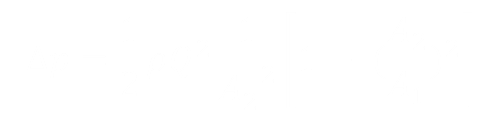
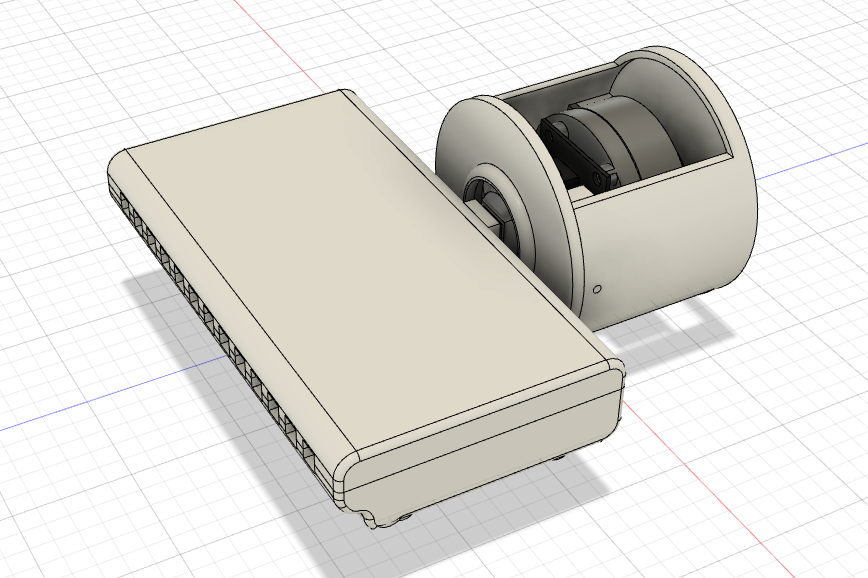
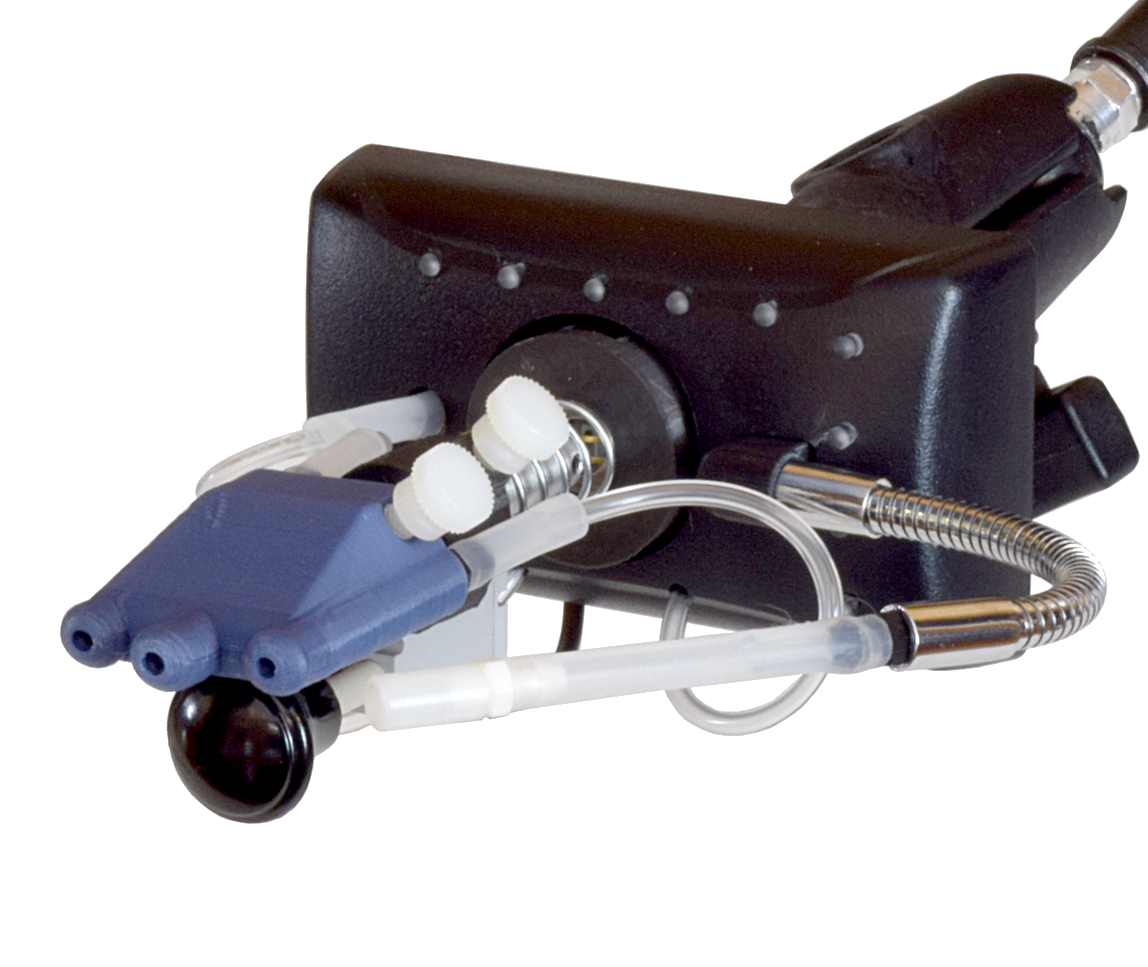
 Now that I had tested some of the detailed parts I was concerned with, I was confident that I could design the entire base unit. The first draft of the design took about two hours. For now, I decided to use small wood screws to hold the components together. I plan on considering using other methods for the assembly process later.
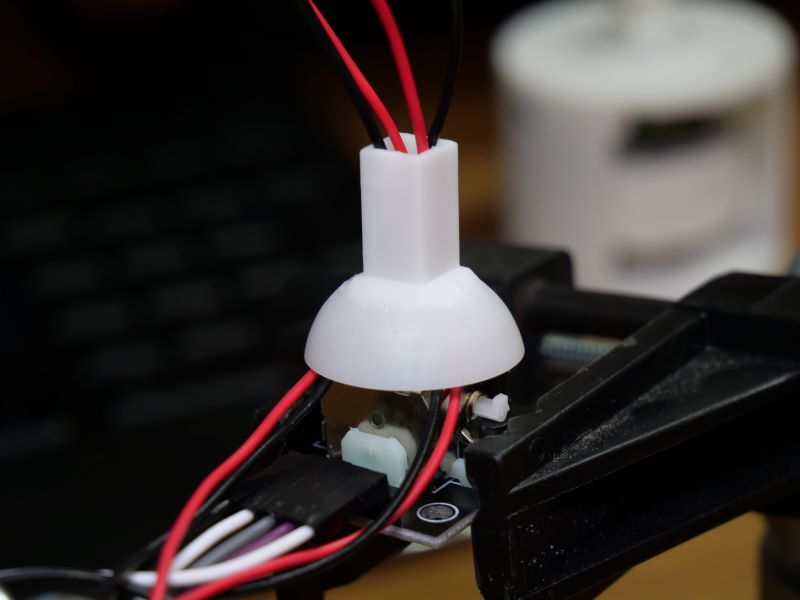
Now that I had tested some of the detailed parts I was concerned with, I was confident that I could design the entire base unit. The first draft of the design took about two hours. For now, I decided to use small wood screws to hold the components together. I plan on considering using other methods for the assembly process later. All of the components printed without any major issues, except one. The component I had trouble with was the joystick handle. This component was both difficult to design and fabricate. This component had to be designed so that wires from the circuit board inside the harmonica unit could pass through the component while providing the snug fit to the joystick module. In terms of fabrication, I first tried 3D printing the component with an FDM printer, but as you can see in the photo, the outer part was too thin. So, I tried printing this component with an SLA printer. It worked but I had to re-print three times and make additional adjustments. As you can also see, in the final version, wires could pass through without affecting the snug fit to the joystick module.
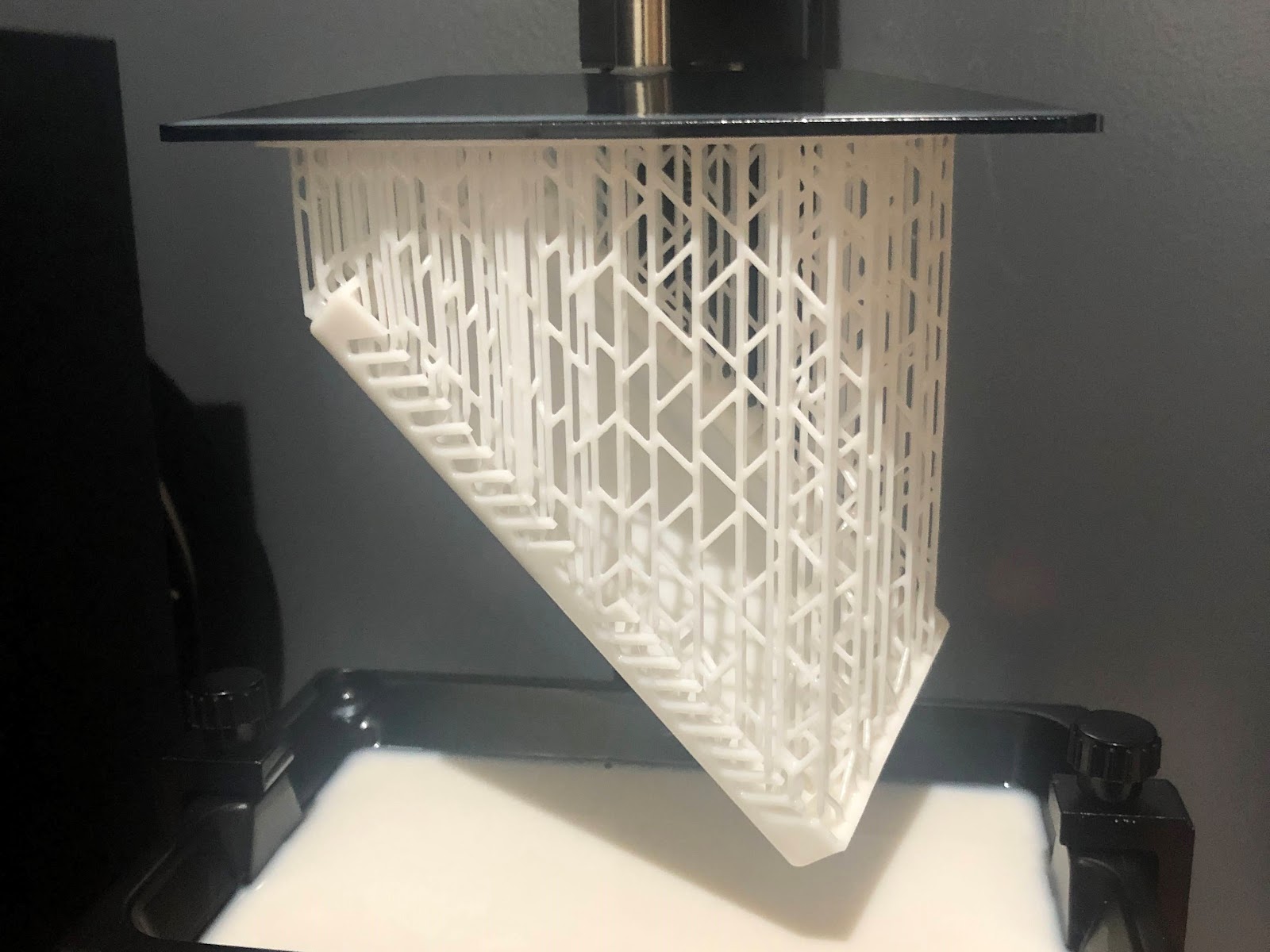
All of the components printed without any major issues, except one. The component I had trouble with was the joystick handle. This component was both difficult to design and fabricate. This component had to be designed so that wires from the circuit board inside the harmonica unit could pass through the component while providing the snug fit to the joystick module. In terms of fabrication, I first tried 3D printing the component with an FDM printer, but as you can see in the photo, the outer part was too thin. So, I tried printing this component with an SLA printer. It worked but I had to re-print three times and make additional adjustments. As you can also see, in the final version, wires could pass through without affecting the snug fit to the joystick module.
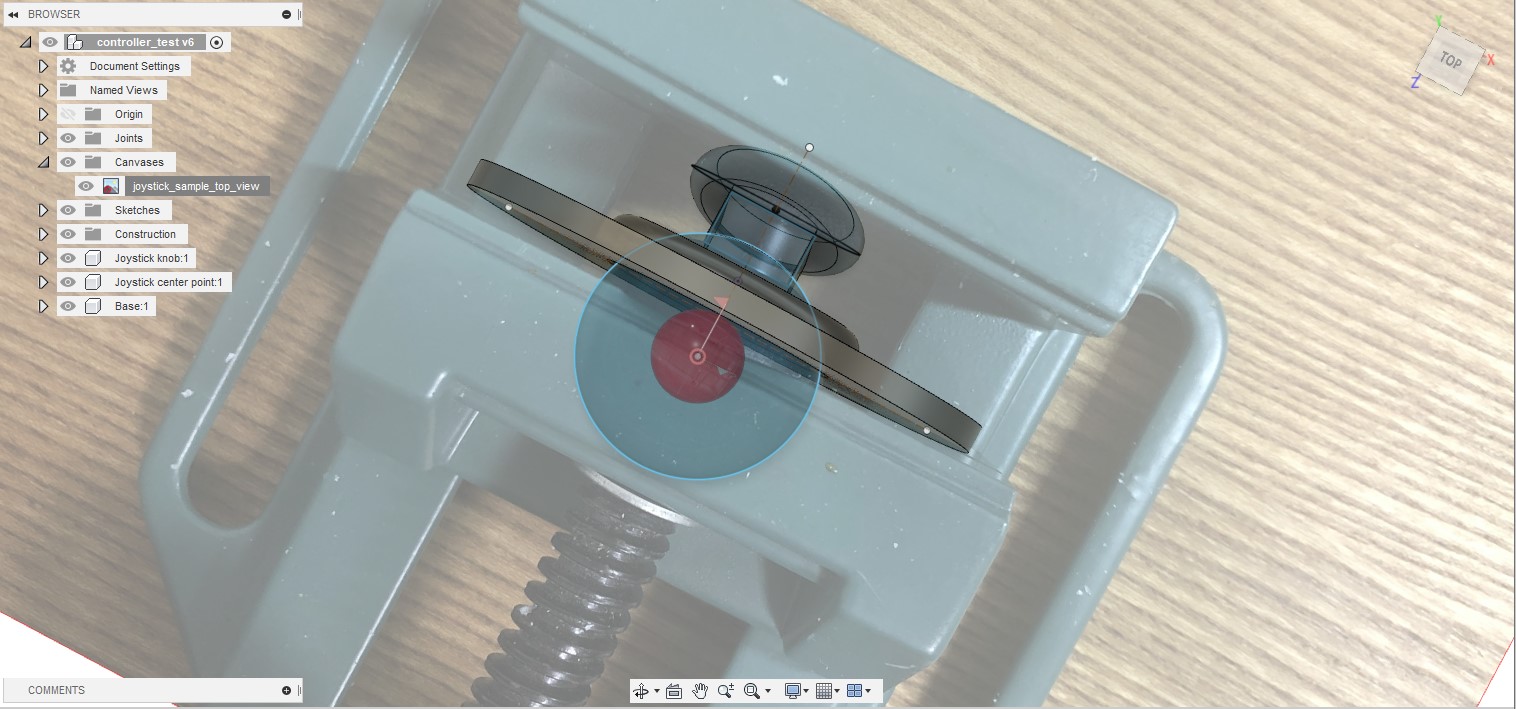
 I also came across another issue. The rotary joint between the joystick module and the potentiometer wiggled significantly when the joystick was moved. I should have noticed this in CAD, but it’s always a challenge to think about how things are going to work in the real world versus what it looks like in CAD.
I also came across another issue. The rotary joint between the joystick module and the potentiometer wiggled significantly when the joystick was moved. I should have noticed this in CAD, but it’s always a challenge to think about how things are going to work in the real world versus what it looks like in CAD. To make the platform, which the potentiometer module sits on more stable, I added a circular guide around the potentiometer to provide additional support.
To make the platform, which the potentiometer module sits on more stable, I added a circular guide around the potentiometer to provide additional support.
 It took a while to make adjustments, wait for the 3D printers, and to test fit the components; however, all this patience paid off at the end and I was satisfied with the result. The video below is a short demo of the base unit.
It took a while to make adjustments, wait for the 3D printers, and to test fit the components; however, all this patience paid off at the end and I was satisfied with the result. The video below is a short demo of the base unit.



 Antoine Pintout
Antoine Pintout
 Malte
Malte
 Ultimate Robotics
Ultimate Robotics
 Arik
Arik
Greetings from France,
I'm a musician/ drummer and I've CP : https://www.youtube.com/watch?v=2mSi5kd2OR4 - I'm already using the "Jamboxx Instrument" : "Jamboxx is the world's leading hands-free, breath-powered accessible musical instrument. It is perfect for musicians with disabilities".
I'm very interested by your project, is there a way for me to test your product someday ?
Keep up the good work.
Thank you. :-)
PLH