 Anthrobotics
AnthroboticsOur first ventures into robotics started with servos!
In May 2015, we started off with some very simple motion experiments, getting hobby servos to work with a number of different software tools. Using embedded servo controllers (the LynxmotionSSC-32U and BotBoarduino), we familiarized ourselves with the basic operation of PWM motors and what little controls we could integrate into our designs.
At the time we were not fully aware of the drawbacks associated with direct driving a humanoid robot using hobby servos (especially for the scale we were aiming for). Nonetheless it got us headed down the right path!
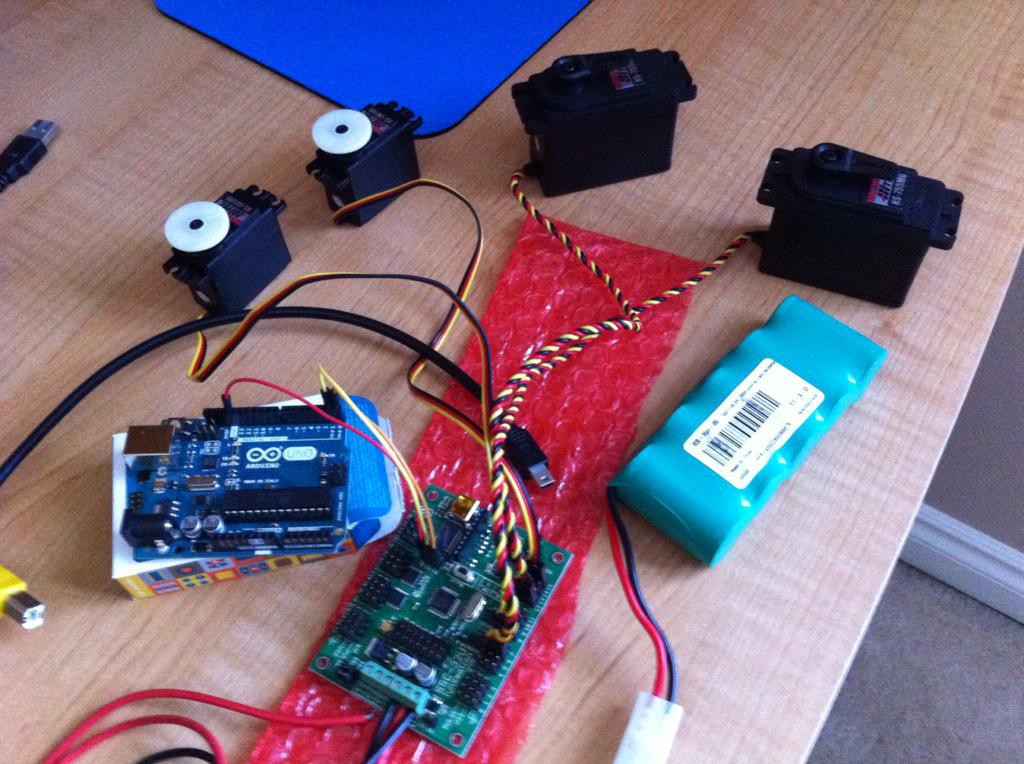

And of course, our first working test of multiple servos working together:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.