 Anthrobotics
AnthroboticsWe made some changes to rebalance the existing lower body, and prep it for it's first walking test.
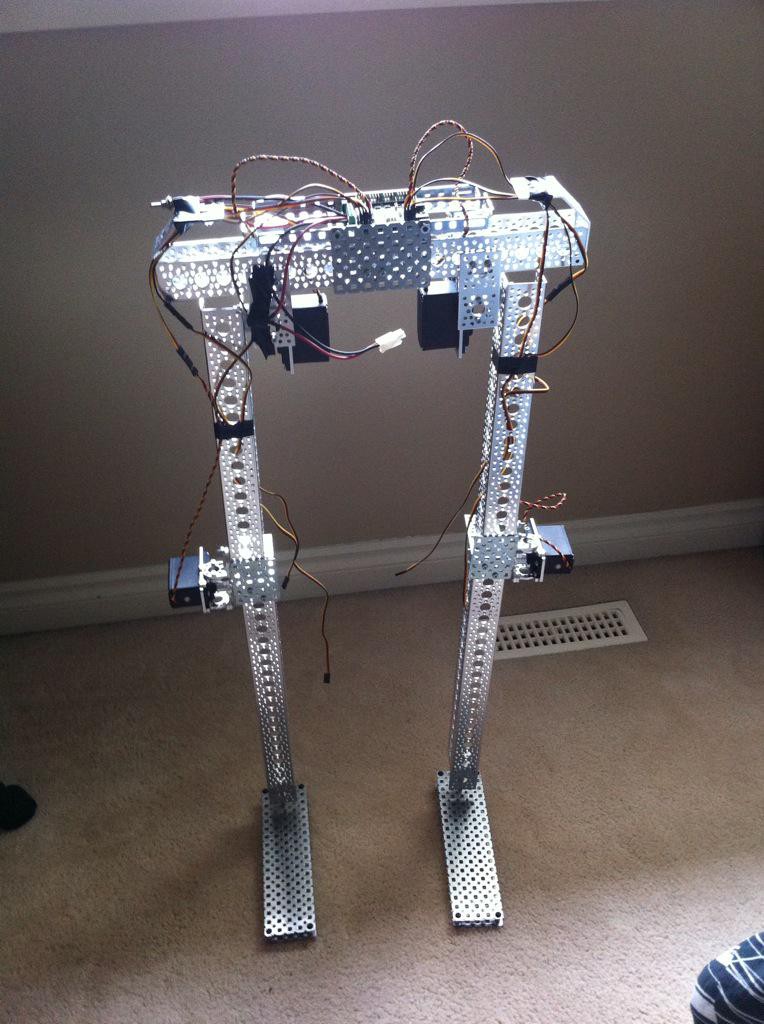
The pelvic region was slightly altered to not require a tape measure for balance anymore (haha). It was now capable of free-standing even without batteries mounted.
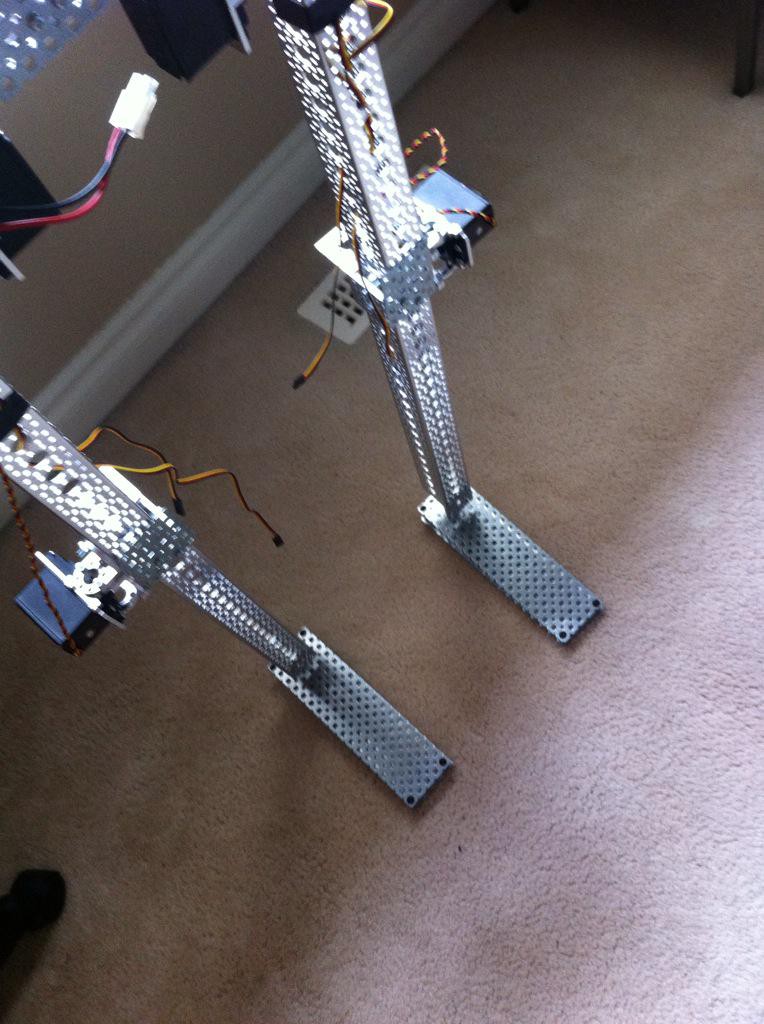
Additionally, the knees and ankles were re-done to reinforce them, as well as provide the ankles with active control we deemed necessary for walking to be possible.

Soon enough, we would be ready to make Freddy walk for the first time!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.