 Nick Rehm
Nick RehmdRehmFlight has been used as a teaching tool for aircraft stabilization and flight control principles in universities and tech companies around the world. It is not meant to out-perform other flight controller packages on the market, or be used in a commercial sense. It is best suited for rapid prototyping or allowing a radio control hobbyist to get their feet wet in flight control code for their VTOL drone project. Much more information is included in the dRehmFlight VTOL Documentation .pdf.
- Code modifications and compiling done within the Arduino IDE with Teensyduino add-on.
- Default code supports 6 ESC outputs using OneShot125 Protocol, and 7 conventional PWM outputs for ESCs or servos, with the ability to modify the code for extra outputs for custom setups.
- Support for conventional PWM, PPM, or SBUS receivers.
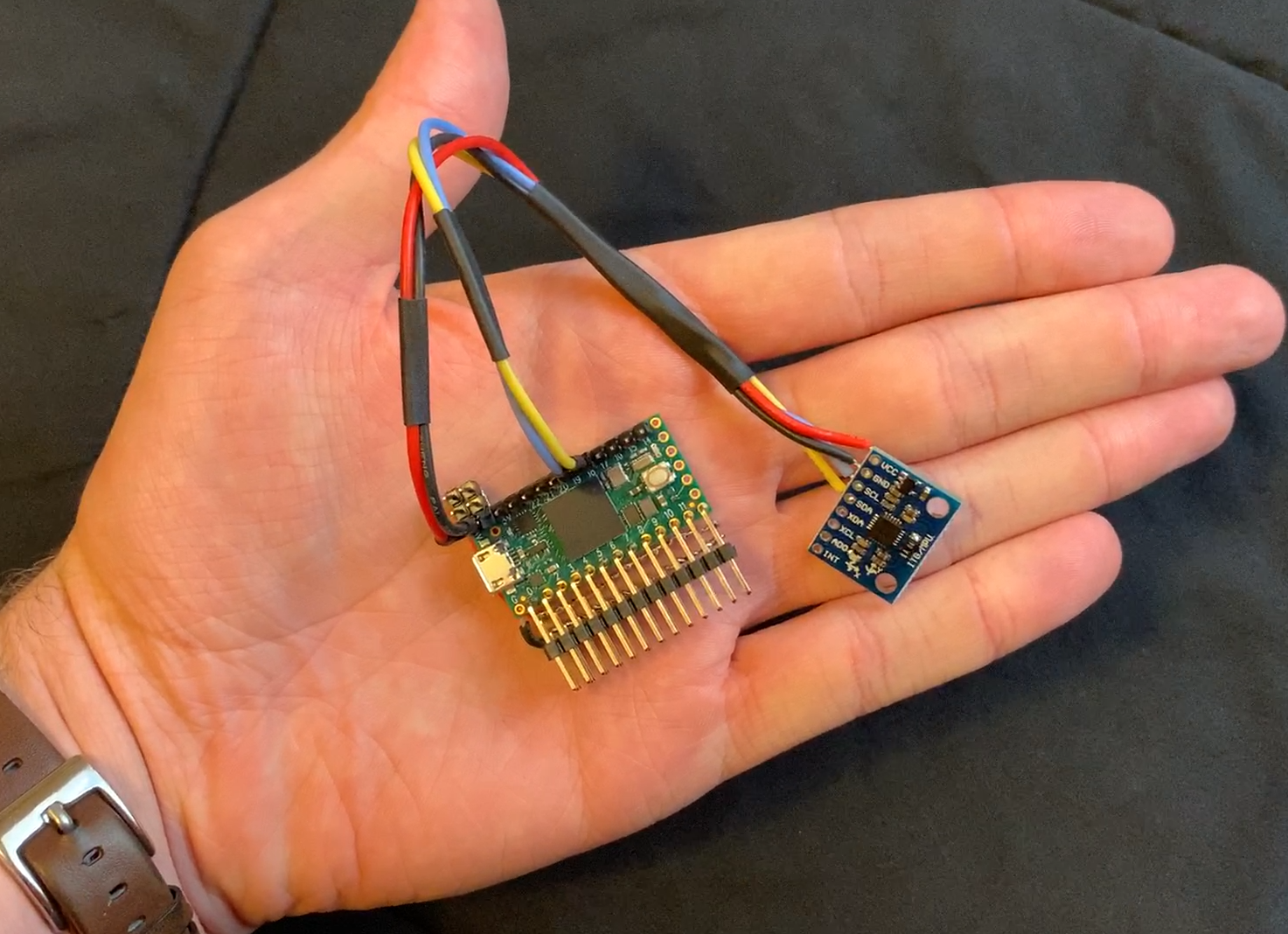
- MPU6050 and MPY9250 IMUs supported.
- Easy to use control mixer with stabilized axis variables and ability to pass direct, unstabilized commands to the motors or servos direct from the transmitter.
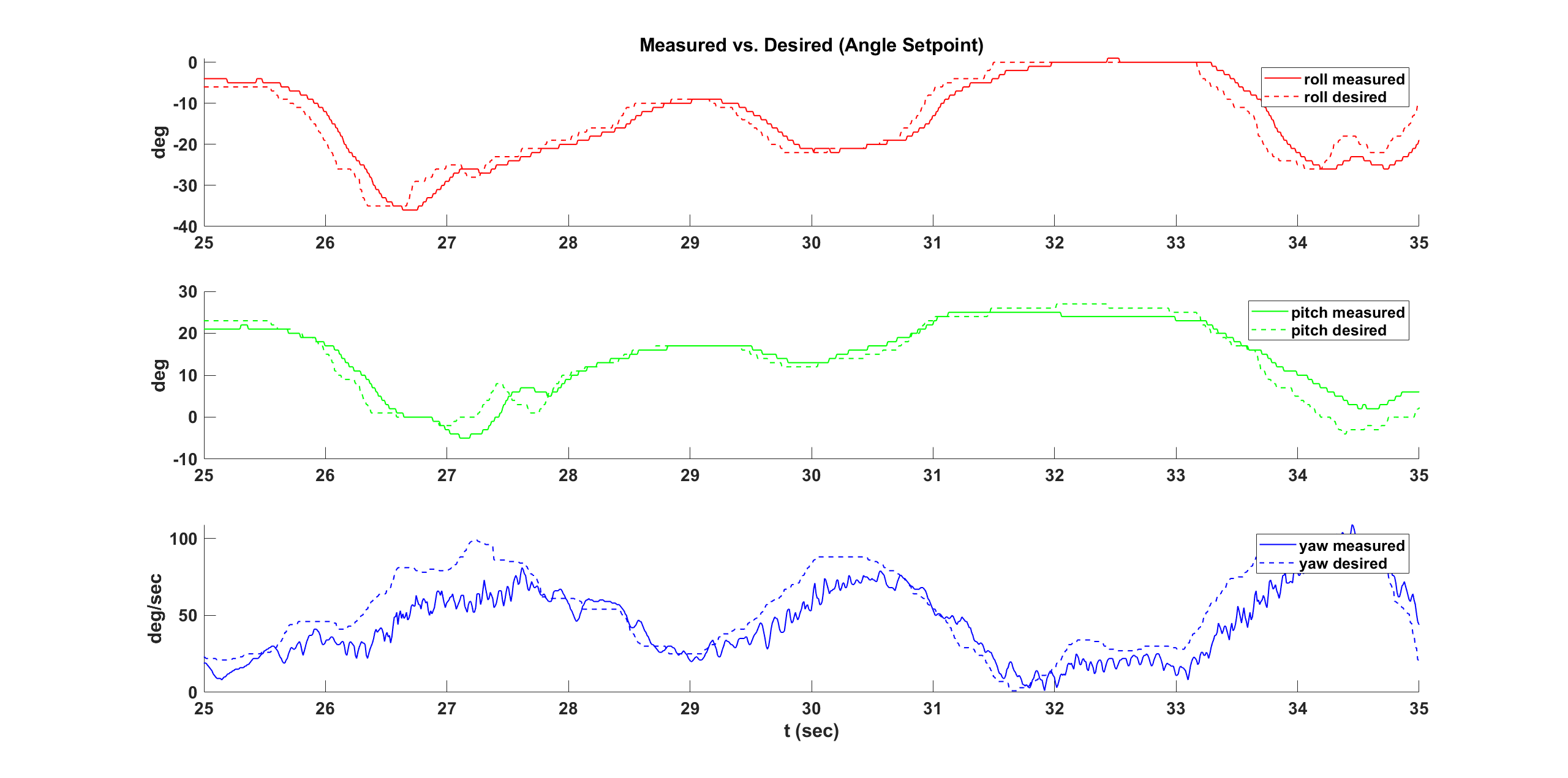
- Three PID controller types including rate and angle-based setpoint.
- Simple variable fading, with support for more advanced options planned in the future.
- Default hardware setup (Teensy 4.0 and MPU6050 IMU) costs less than $30 and weighs less than 15 grams.
- Comprehensive documentation with explanation of every function and variable, as well as tutorials for setting up the hardware and modifying the code for your application.
Feature Requests and/or Planned Updates:
- More fading options
- Many more!








 wagner
wagner
 Norbert Zare
Norbert Zare
 atltvhead
atltvhead
 Sukasa
Sukasa
Is there a need to have two different IMU offsets or calibrations for VTOL vs cruise mode when working on a transitioning VTOL like the biplane? I have modified the code for different motor mixes where roll and yaw swap but I don't know if anything else needs to be changed. Yet to upload and try the code.