 Anton Khrustalev
Anton KhrustalevDESIGN OF THE STRUCTURE
Statement of the problem
You need to find a compromise between a number of characteristics to design a prosthesis and need to prioritise between them to do this.
As described above the direct purpose of the project is developing an affordable bionic prosthesis. The cost of the prosthesis is determined by several factors.
First of all, the cost of components specifically the cost of purchased device elements and the cost of manufacturing and processing elements unavailable or advisable to purchase. The cost of manufacturing includes the cost of materials the operating time of the processing device and the processing tools.
There are three most common technologies for manufacturing products: milling casting and 3D printing. Milling has a huge value due to the high cost of processing equipment and tools and therefore the high cost of depreciation of equipment. Casting is a fairly cost-effective method of manufacturing but it is unnecessarily expensive to produce unique copies. And finally, 3D printing, which is the most popular method of manufacturing small-scale products. It has a fairly elementary level for entering the technical process, as well as high availability for the user and relatively low cost of manufacturing small-sized products with complex shapes.
So the most economically optimal technology is 3D printing. Further development of the design must be carried out in accordance with the basics of modelling rules for 3D printing, namely:
- Consider the anisotropy of the ultimate product.
- Initially determine the position of the model the on the 3D printer build plate.
- Minimise the number of external components.
- Select a certain flat surface from which to start printing the part.
- Avoid sharp corners to reduce the impact of print head inertia on model quality.
- Consider specific changes in model size due to shrinkage and a relatively low print resolution of FDM printers.
- Minimise postprocessing as much as possible.
Choice of design
The designs of existing prostheses can be divided into several types:
On the device of the drive mechanism
- Cable drive. It is very simple and therefore often used in designs made with 3D printing (for example Brunel Hand 2.0 and InMoov). But the low resource and complexity of configuration is its a drawback
- Worm gear. It is reliable if it is made of a metal pair, such as steel/brass or a metal/polymer combination, such as steel/nylon. However, it is not suitable for manufacturing on a 3D printer, and it is unlikely to find a suitable pair of master/slave gears on sale. It does not require energy to fix the position.
- Linear actuator. With strict compliance with the coincidence of the driving force vectors and the actual movement of the actuator rod, it is a relatively simple and powerful finger drive mechanism. It does not require energy to fix the position.
The location of the engines
- In the fingers. The most compact option, although there are problems with constantly bending wires and complexity of Assembly.
- In the palm. This option is the most common among bionic prostheses, as it combines compactness and the ability to accommodate more powerful engines.
- In the forearm. This option is not optimal from the point of view of space allocation. It is most often used in robotics to create anthropomorphic robots.
The following considerations are taken into account when choosing a design type from the above options. From the point of view of the maximum resource, the location of the drives in the fingers is irrational due to the strong complexity of the design and the presence of wires that are constantly in motion. The location of the drives in the forearm is also not optimal due to the long length of the cables (which leads to the increased backlash, or to the need for greater cable tension, which, in turn, significantly reduces the resource) and the large size of the device. This option is optimal for robotics, but not for bionics, since in many...
Read more »
 Sohum Desai MD
Sohum Desai MD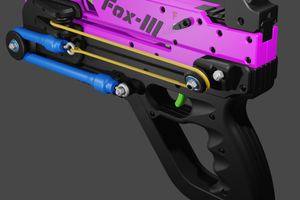

 Jason Bender
Jason Bender
 Supercell
Supercell