Jacob David C Cunningham
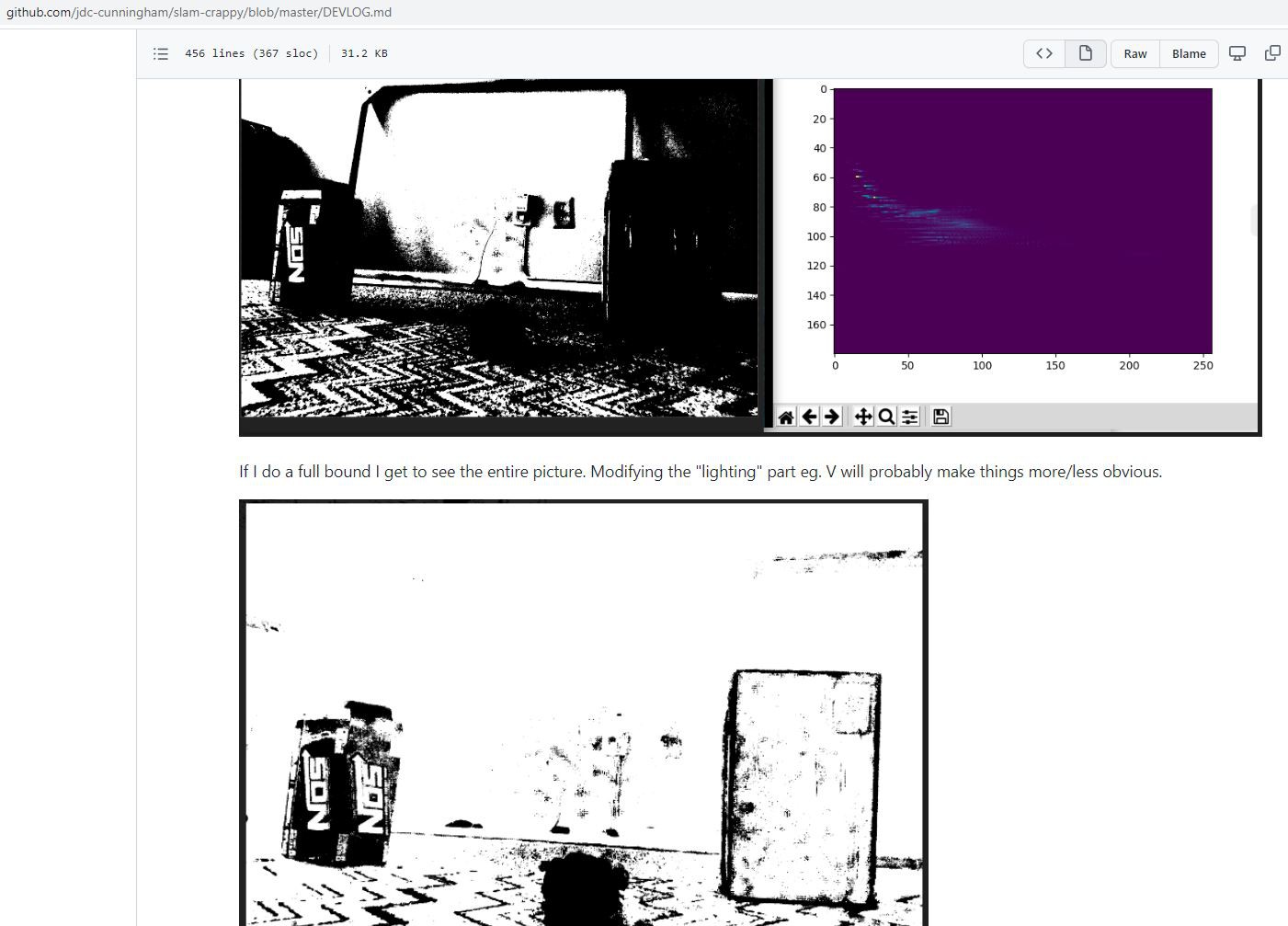
Jacob David C CunninghamThis projected stalled, OpenCV is hard who knew.
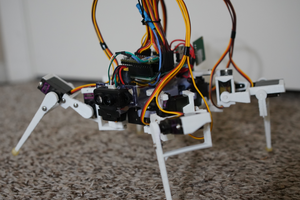
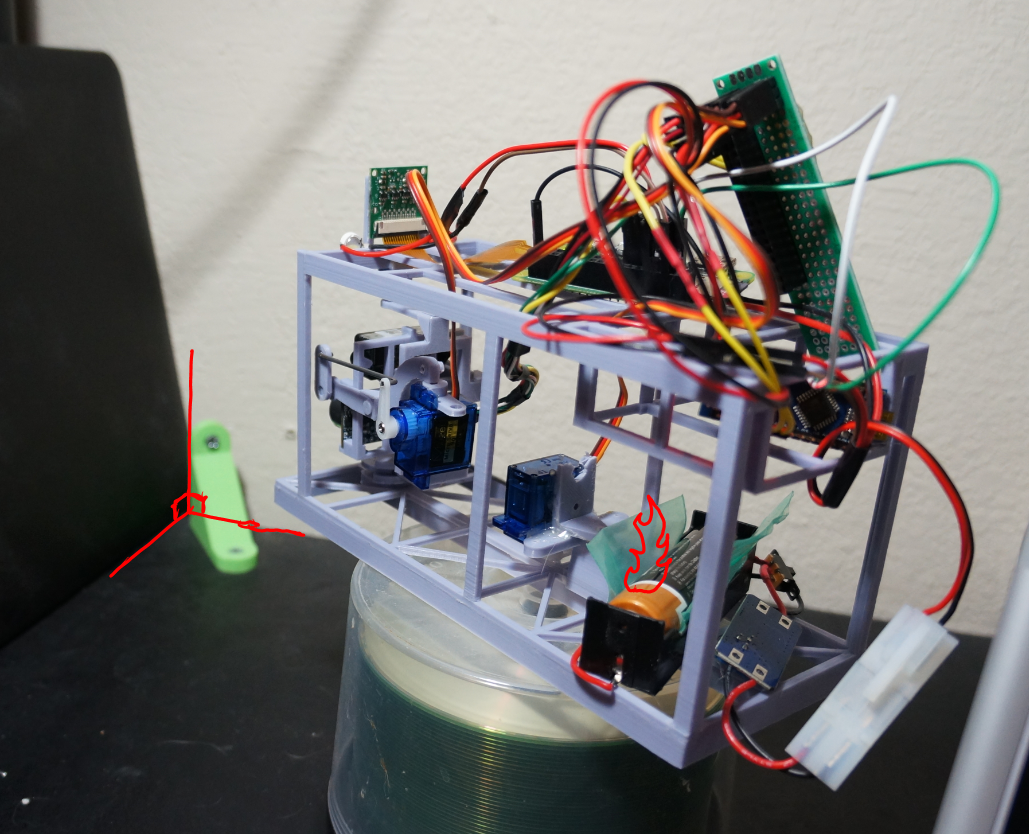
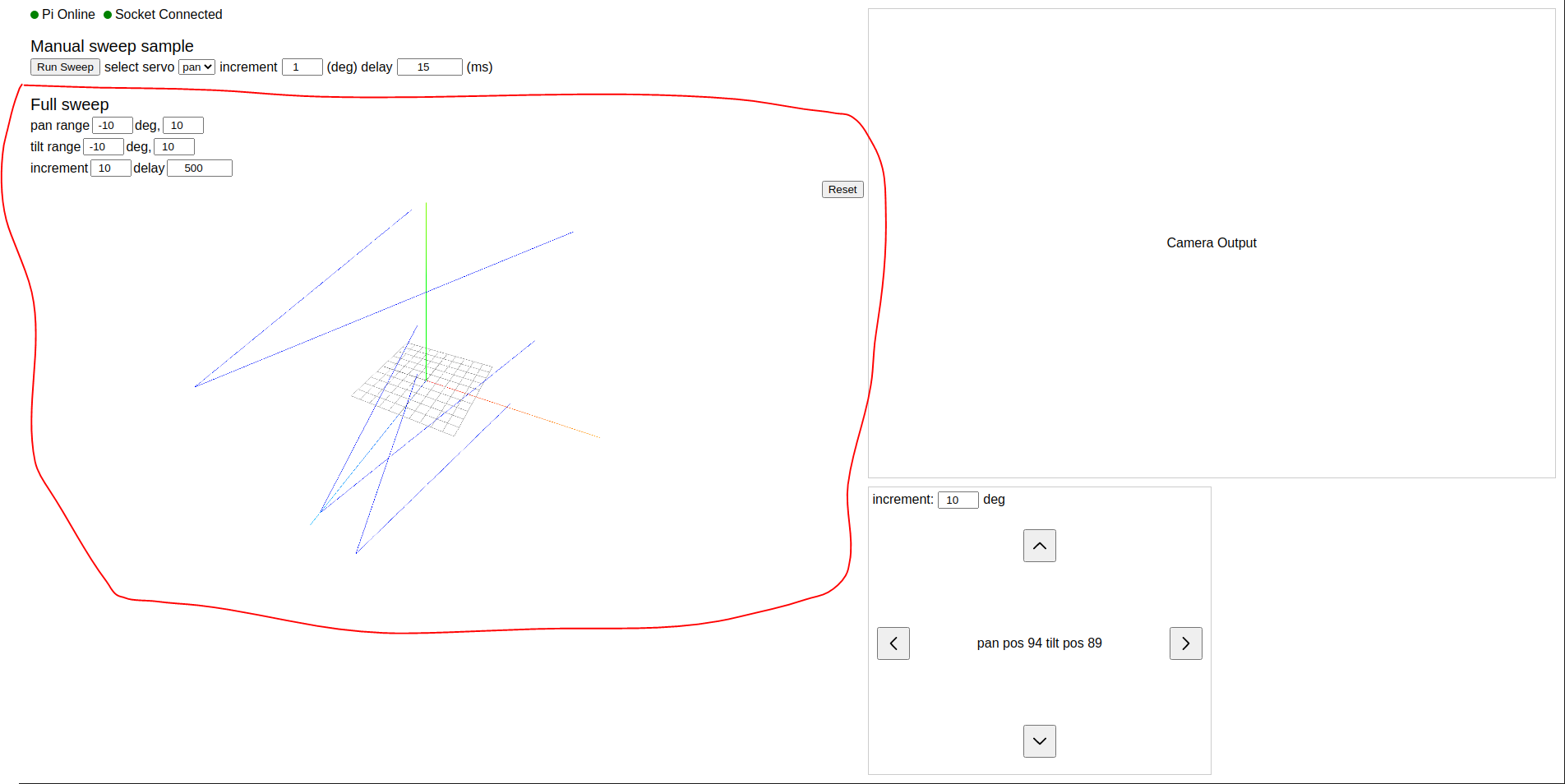
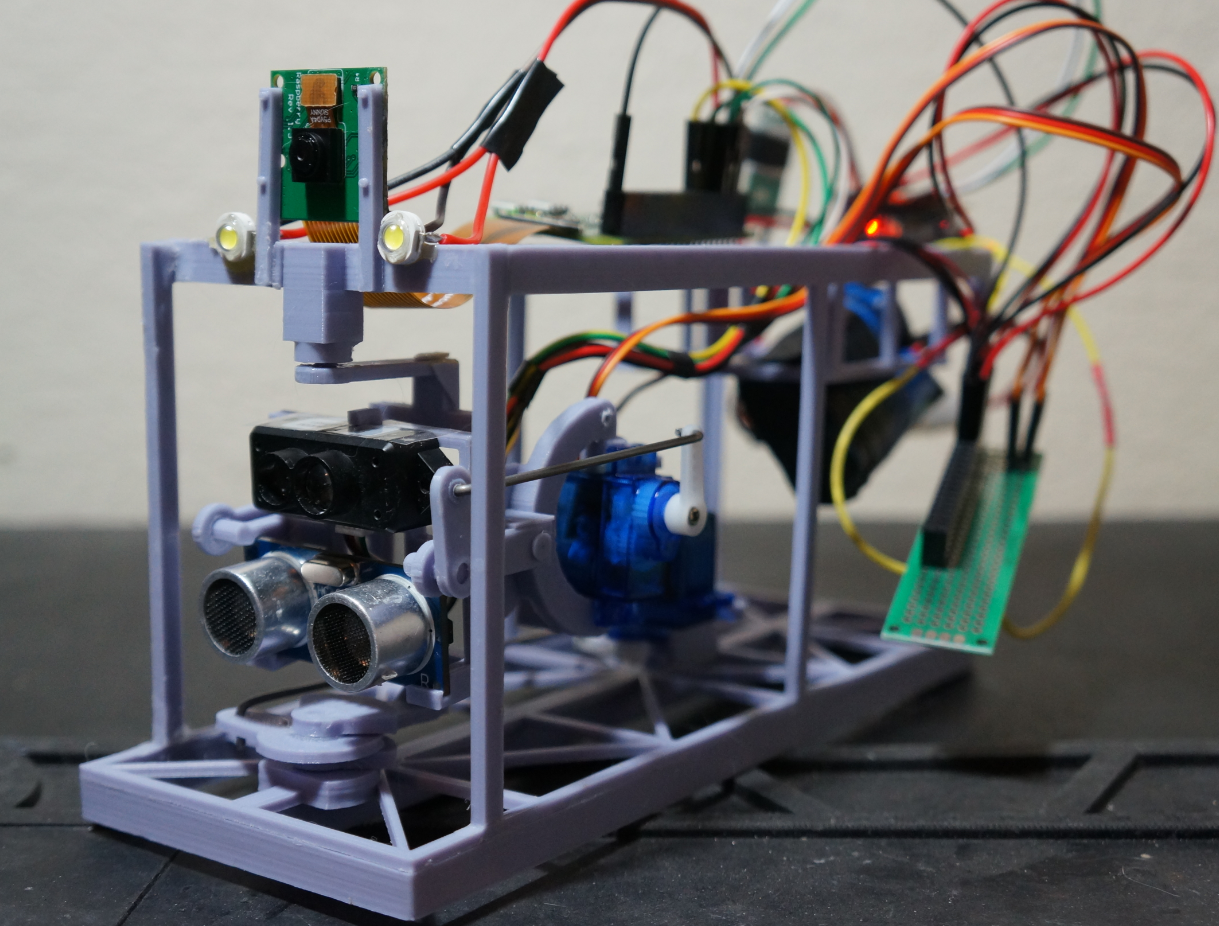
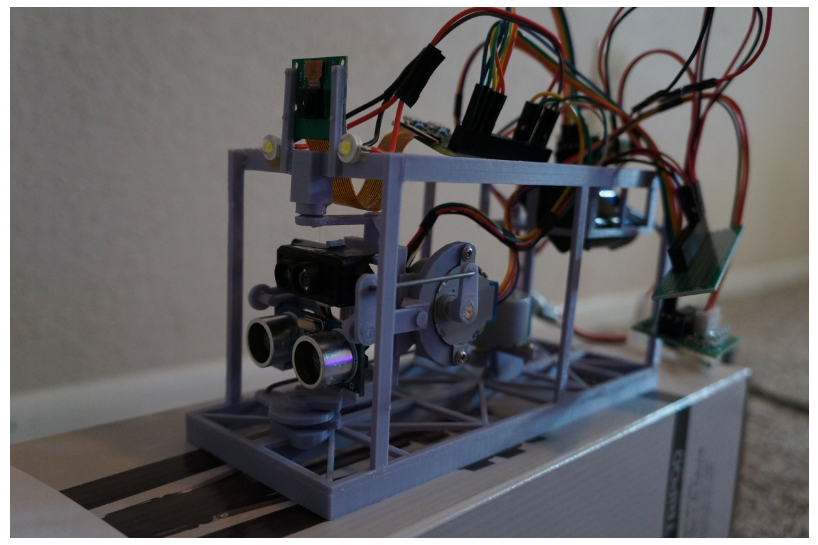
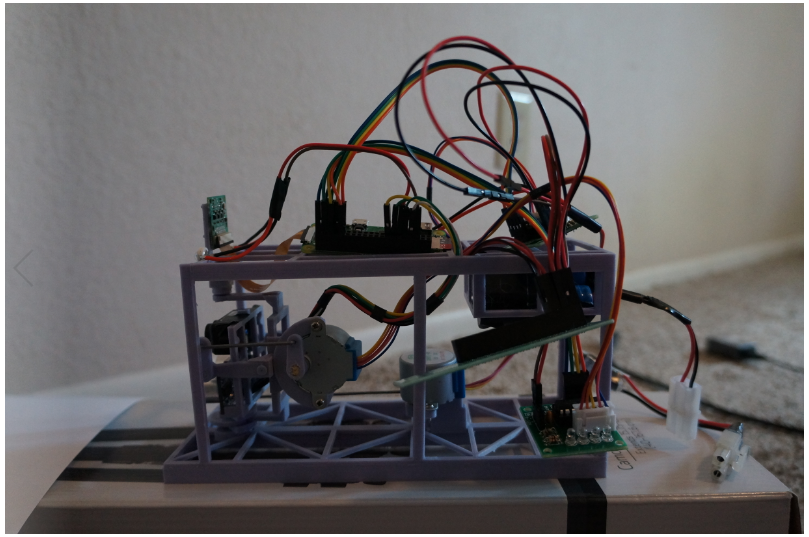
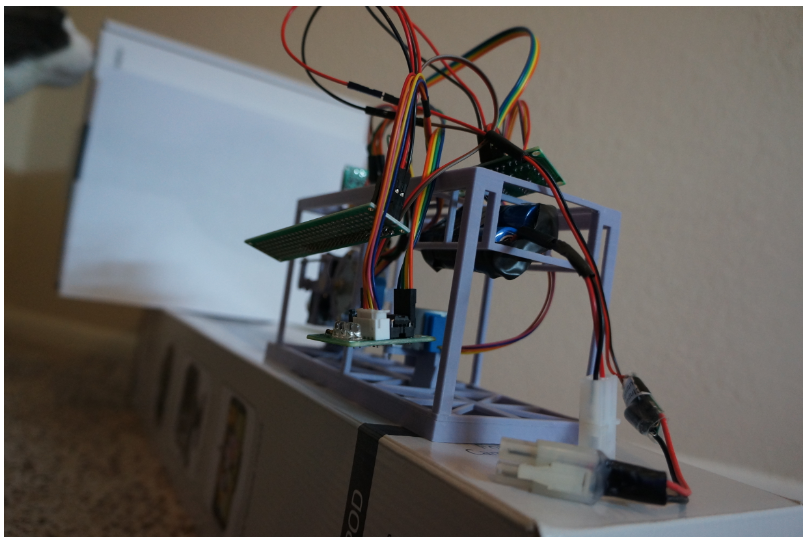
Also the pan/tilt mechanism was kind of a fail due to the stiffness of the wires fighting the servos/preventing them from returning/going to the right position. Also no positional feedback.
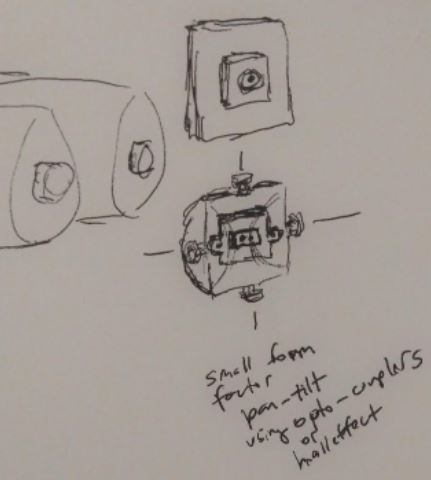
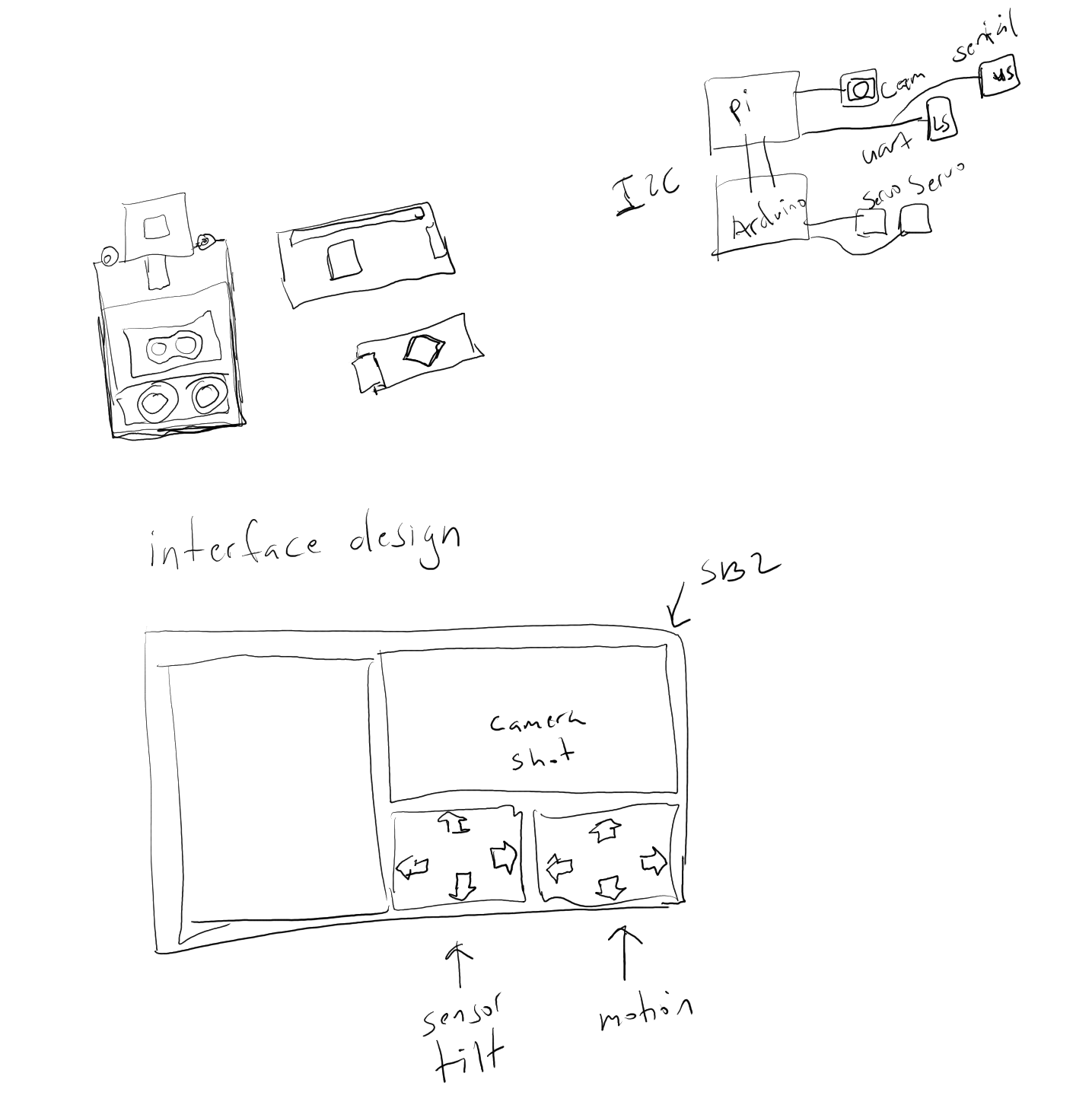
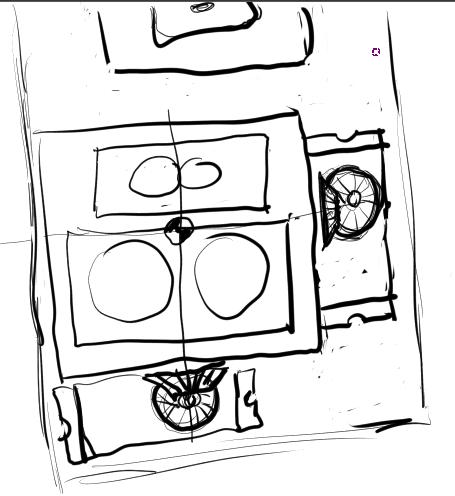
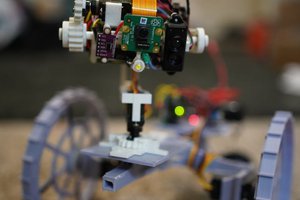
I have another version in mind, smaller like this:
Anyway time will tell, my life might get rough for a bit (transitioning to a new job in the near future).



 Crypto [Neo]
Crypto [Neo]
 Mister Malware
Mister Malware