 Jacob David C Cunningham
Jacob David C CunninghamI have lost interest in this thing... the desire is still there for 3D mapping but I am still very much an OpenCV noob. This method is probably dumb/bad. Still I like the idea of "real dimensions" vs. estimated/assumed from say stereoscopy. Granted I am not expert in any of these fields... just bs.
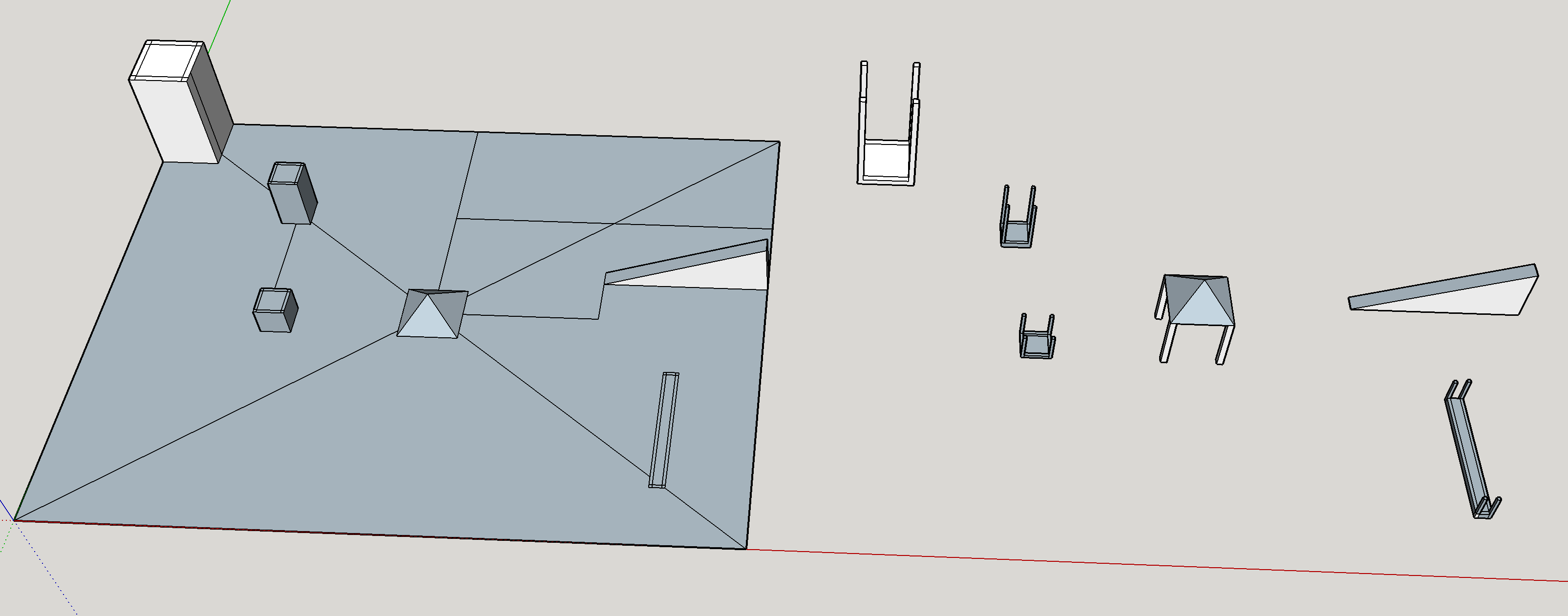
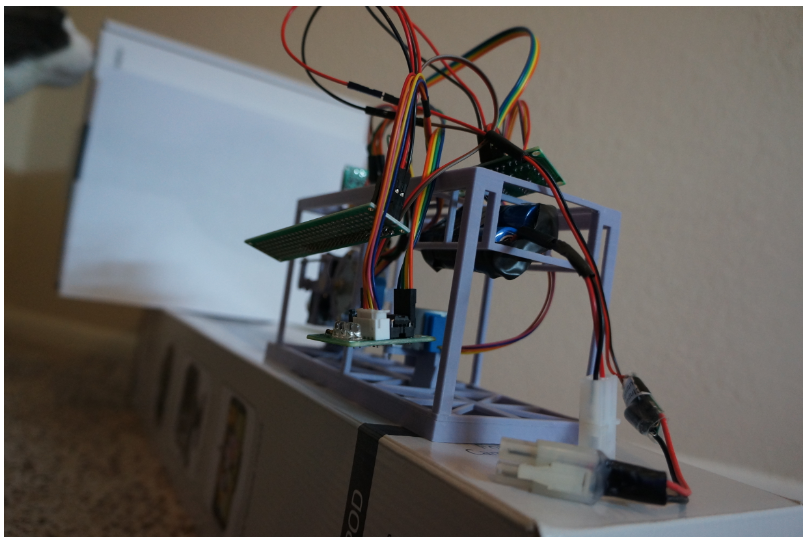
Right now I'm printing some shapes with known heights. I made this basic L-shaped thing so I had a base/platform to mount those raised shapes/angles on. Then the distance sensors will calibrate against it. I'll give myself a handout by making the shapes have a black surface(Sharpie) so it sticks out against the white paper background.
I'm super beat today so I can't really think anymore, just wanted to post something. I'm actually trying to push this project aside, while making some notable progress(like the calibration GUI written in something that's not web-based or a web-wrapper). That's a learning thing, give myself false sense of value on the market.
The other project is a true 4-legged robot with 12 servos. I saw some videos on YouTube showing it's possible to get decent movement with the cheap 9g servos and 4 legs... this time I'm using one of those 18650 cells on purpose with a boost converter. Plan is to use a sweeping ultrasonic sensor for navigation. I also got a little BLE module I've never used one before it looks pretty cool/simple of a device(4 pins).
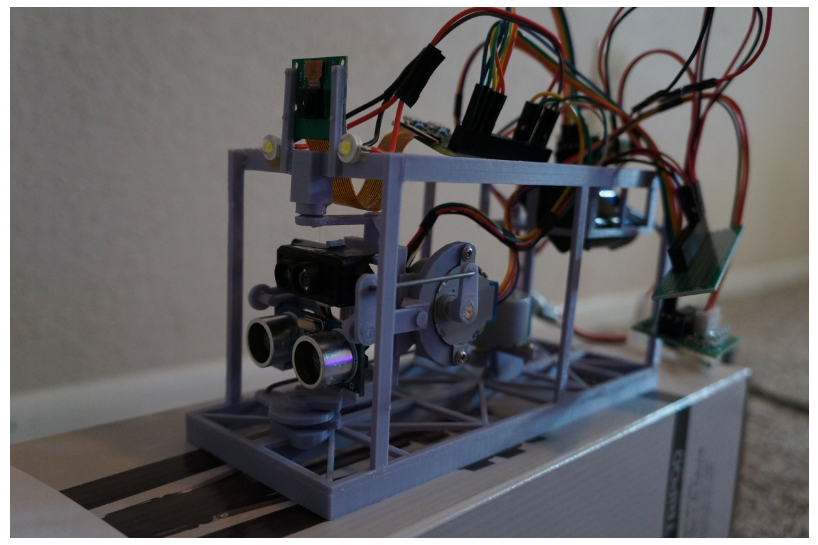
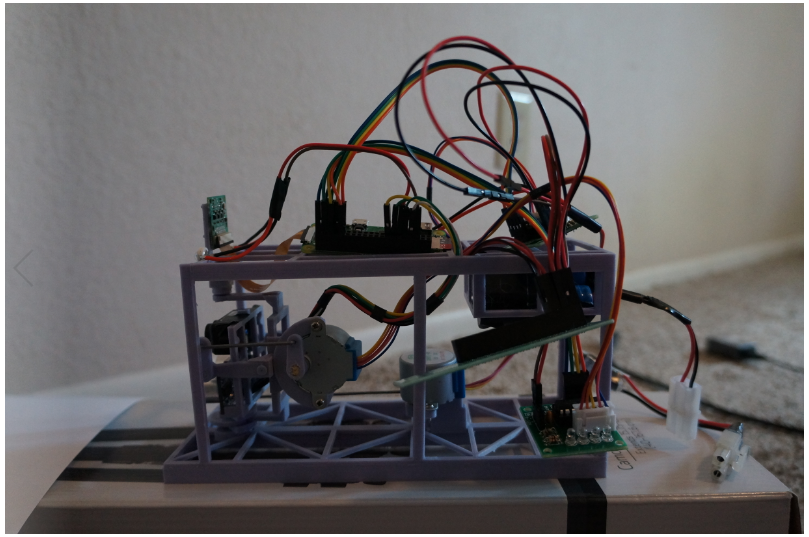
I could have switched these to servos but honestly done with it. Will spend more time on the code than the build... the top piece since the thing is solid(battery area is not glued) it took 7 hours to print that... the front-most vertical supports are extra... also the camera mount is backwards and not tall enough(ribbon cable).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.