 Jacob David C Cunningham
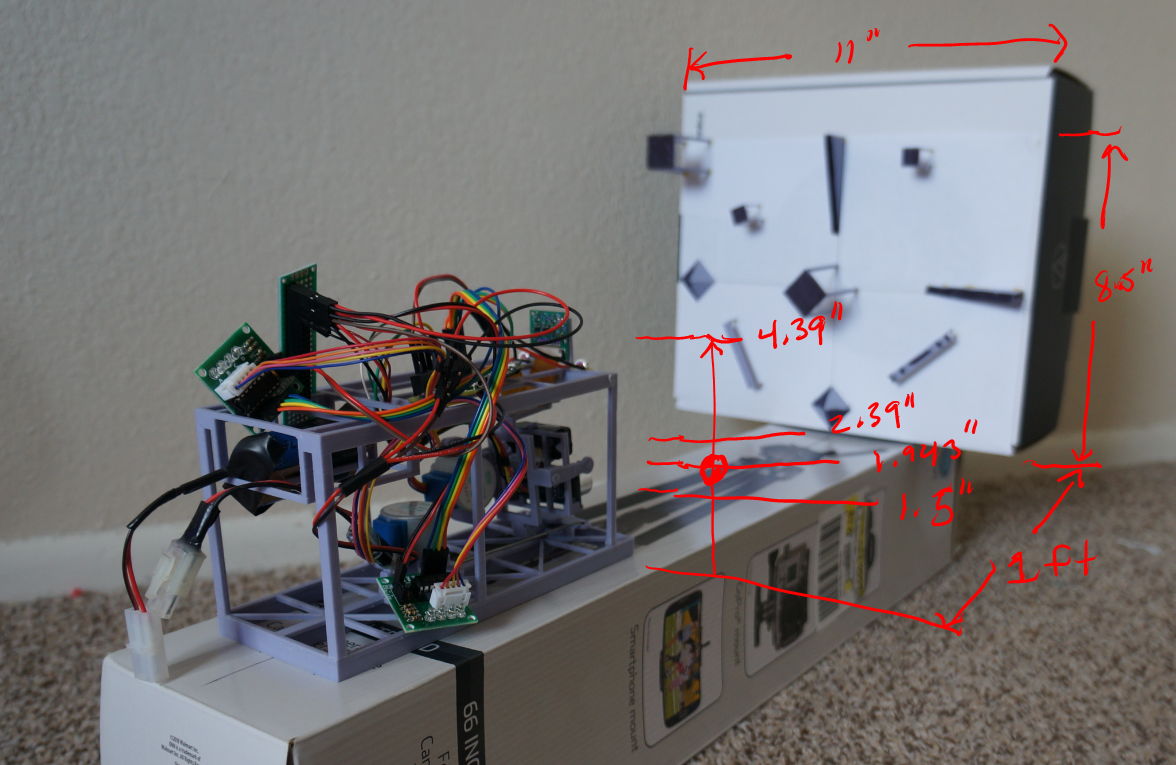
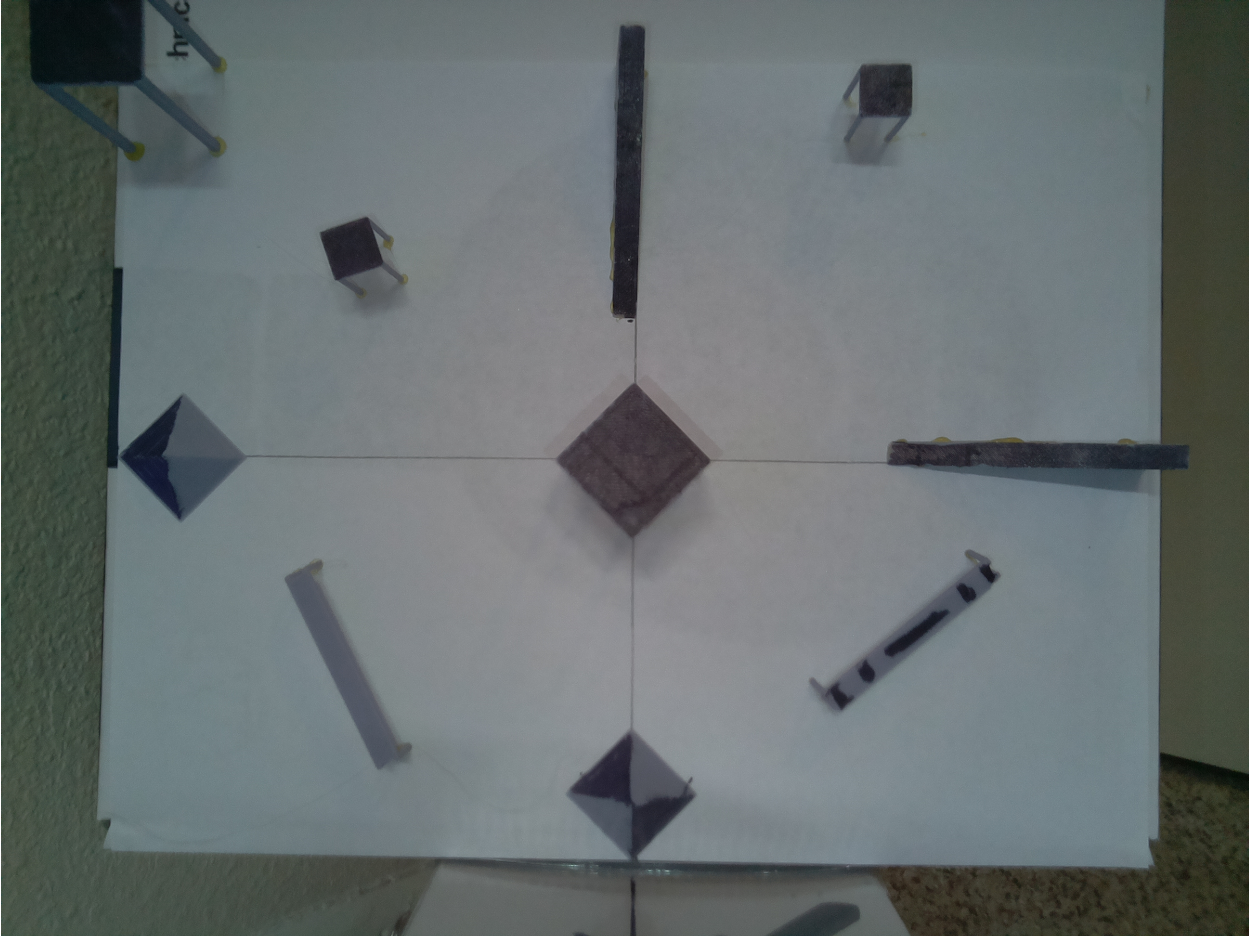
Jacob David C CunninghamSo I printed those parts out, and then I folded a standard 8.5" x 11" piece of printer pay in both x/y (or is it z) axes. Drew lines, these are obvious references. Generally I mounted stuff against these lines. I didn't really measure(I was supposed to but lazy). I have a rough idea though based on the paper dimension.

I glued them on, I know the part dimensions since I made them in Google SketchUp(CAD program). I set the "unit" back a certain distance(I put some basic markers eg. 6" away(too close), 1' away(usable) and 16" away.
I'll go over some concept ideas of what I intend to do, these steppers have a terrible slop in the gears. I'm talking 3-5" of swivel between the gear slop and linkage slop...
One main thing I don't know right now is how to guess how far away something is as a starting point. I mean when you look at something, if something is huge you would think "that's close to me" but it could be massive and be far away.... small and still be massive and far away...
But... this is generally intended to be indoors and I can do some preliminary bounding/scanning as a combination from CV and physical distance measurements(LIDAR sweep).
Gahh "golden rule" come in handy right about now regarding mixing sig figs/errors.
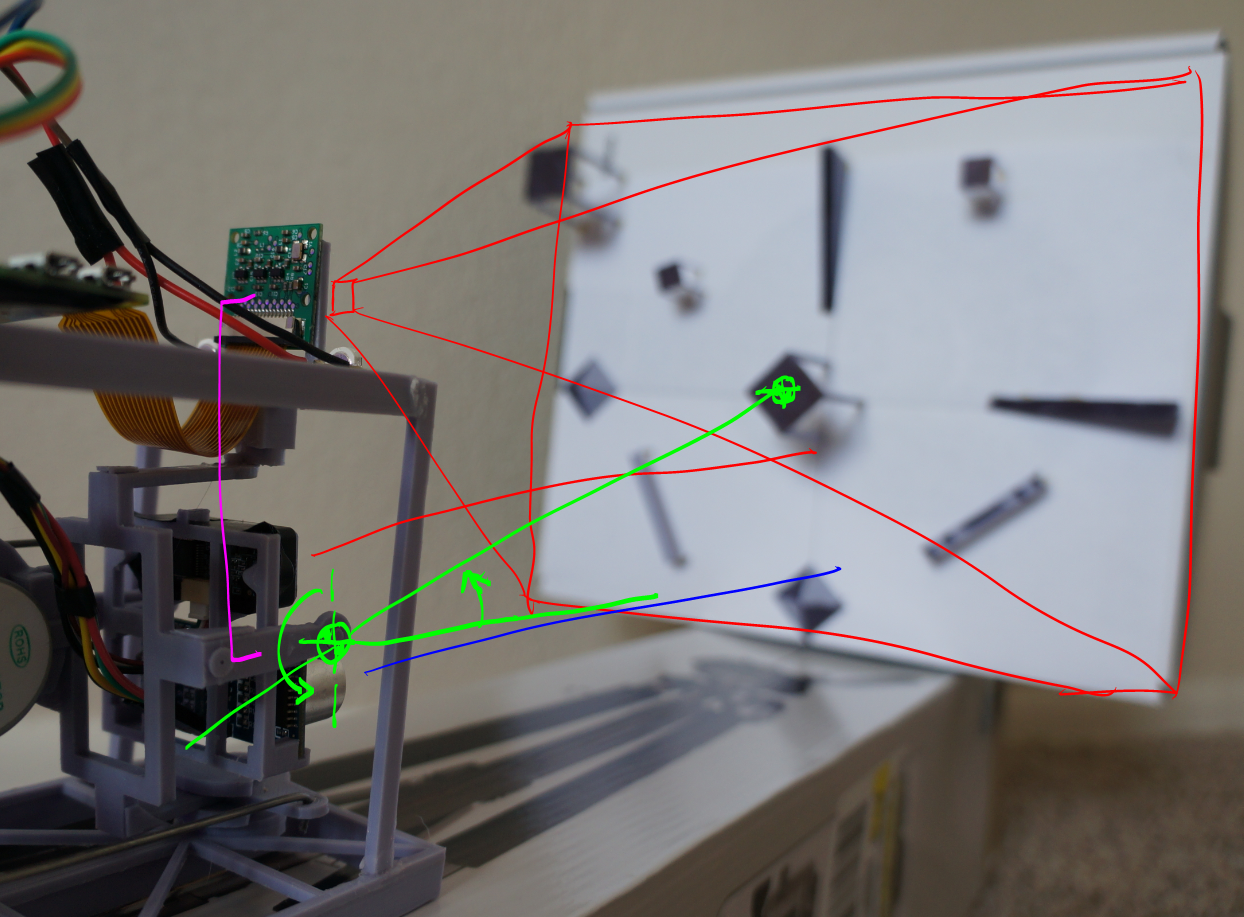
edit: this green part may not make sense, I'll probably have to elevate the base up so when the sensors are level, will be the "center" of the rhombus thing.
Some major goals are being able to do the shape finding/contour/area/blob/etc... with OpenCV then also labeling(text tagging on image by coordinate). I'd like that so easier to know what's up with an image. From that can do the sizing/pixel measurements and determine angles to move on the stepper, etc...
Also I want a GUI, desktop preferrably so will probably try and build something with a C++ graphics library(maybe wxWidget). This UI would be for the calibration/seeing an interactive program in real time vs. having to write code(after the code exists). This is pretty ambitious since I don't really use C++/that low level of stuff, browser-based sure no problem... I'm trying to avoid going that route but will see. Would like to put down some time to learn C++ in a real application.
I also have to figure out some way to mock the pan/tilt/stepper motors because it's annoying trying to code by SSH on the Pi(nano), so slow. Also slow to code by Filezilla/direct edit.
The dimensions will be related, so there will be a "center sensors" function that will look at the calibration guide above(raised platforms) and it will center against the middle rhombus thing. It's all rough dimensions... then will have max arc-sweep and track position... will be loss/drift/etc...
Cat tax heh

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.