 Pascal Buerger
Pascal BuergerVisy system image
Visy comes with a Raspberry Pi 3 system image including:
- Ubuntu 16.04 LXDE desktop
- ROS kinetic
- ROS workspace including all visy packages
- Autostart services for visy packages
- 3.5" touchscreen driver
Download the image using the link below and follow the instructions at visy wiki page.
>>>visy system image<<<
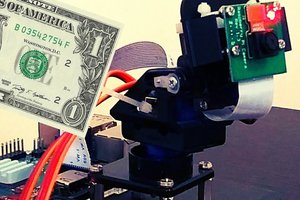
Electronics
.PNG)
>>>Partlist<<<
>>>Files<<<
How to get the board? No problem...
...we uploaded our board to the aisler.com page. So you only have to follow this link and create an account to order the board for a good price.
Shop link: >>>Visy IO Board<<<
How to get the parts? All of this are standard parts...
- You can check your own maker stock first ;)
- Use the partlist on the link above and check the recommended shops
- A lot of shops and maybe your school or university have this parts availible
Case
The case for visy is splitted in three parts. A base part for the most of all electronic parts like lightring, statusbar, camera and Raspberry Pi. At this time the case is designed for the Pi 3. The part in the middle is a combination of air channels for the cooling system of the Pi and a case for the touchscreen. The case is completed by the top part.
.PNG)
.PNG)
>>>Files<<<
How to get the parts? No problem...
...we tested i.materialise.com and created some shop items so you can easily order the required parts using this links:
>>>Visy Case Base<<<
>>>Visy Case Middle<<<
>>>Visy Case Top<<<
You can try your own 3D-Printer but we did not test any FDM printer yet.
Holder
As an additional part for conveyor system we provide a holder for visy.
>>>Partlist<<<
>>>Files<<<
How to get the parts? There are many ways...
- You can use a lasercutter in a Techshop/Makerspace or your School/University
- We ordered from cutcraft a few times so we can recommend this service
- We don't try it but with a 3D-Printer it has to be possible to create the layers too
.PNG)
.PNG)
.PNG)
User-Interface
We created a simple user interface for the touch display on the backside of visy system. The user interface starts automatically after every reboot. It is possible to close the interface using the "X" button and use the ubuntu desktop for your own stuff. By default it is possible to start and stop the sorting application.
.PNG)
With the arrows you can change the displayed image processing state. At this time we included the detected image with coloured lines around conveyor/metalchips. This is the last step at image processing using find contours algorithm and hu moments algorithm for the center point of the metalchip.
.PNG)
After that first image the raw image and some image processing states like hsi, chroma and threshold for binarization are following. So it is possible to have a look behind the scenes of image processing.
.PNG)
Note: The system detects the conveyor system realy slow because it uses the complete image. After that only the cropped conveyor system is used to detect the metalchips.
The last button in row activates the update script. It is neccessary to connect the system to the internet using wifi or cable. Note: The systems gets the latest commits from master branches on github and delete all data at the packages on the system (hard reset).
.PNG)
The full system
In the first way visy is designed to extend the Deta-Robot One project to push it to the next level. In combination with Delta-Robot One and the conveyor system visy can do it's predifined jobs:
- Detect conveyor system
- Control conveyor system
- Detect metalchips (velocity, colour, etc.)
- Control Delta-Robot One (grasp planner, pick and place)
- Sort metalchips by colour
You can have a look a the other projects using the links below.
.PNG)
.PNG)
ROS workspace
All visy software parts are developed using ROS. We provide software modules called packages in ROS so you could use some of them at your own application. For details have a look at the packages readme files using the links below. On the...
Read more ».PNG)
.PNG)
.PNG)
 Norbert Zare
Norbert Zare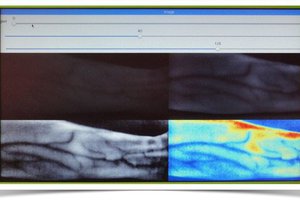
 Myrijam
Myrijam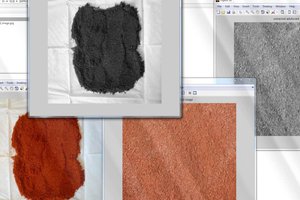
 G.Vignesh
G.Vignesh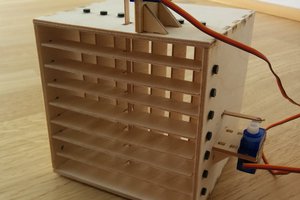
 hanno
hanno