 AdaCore
AdaCore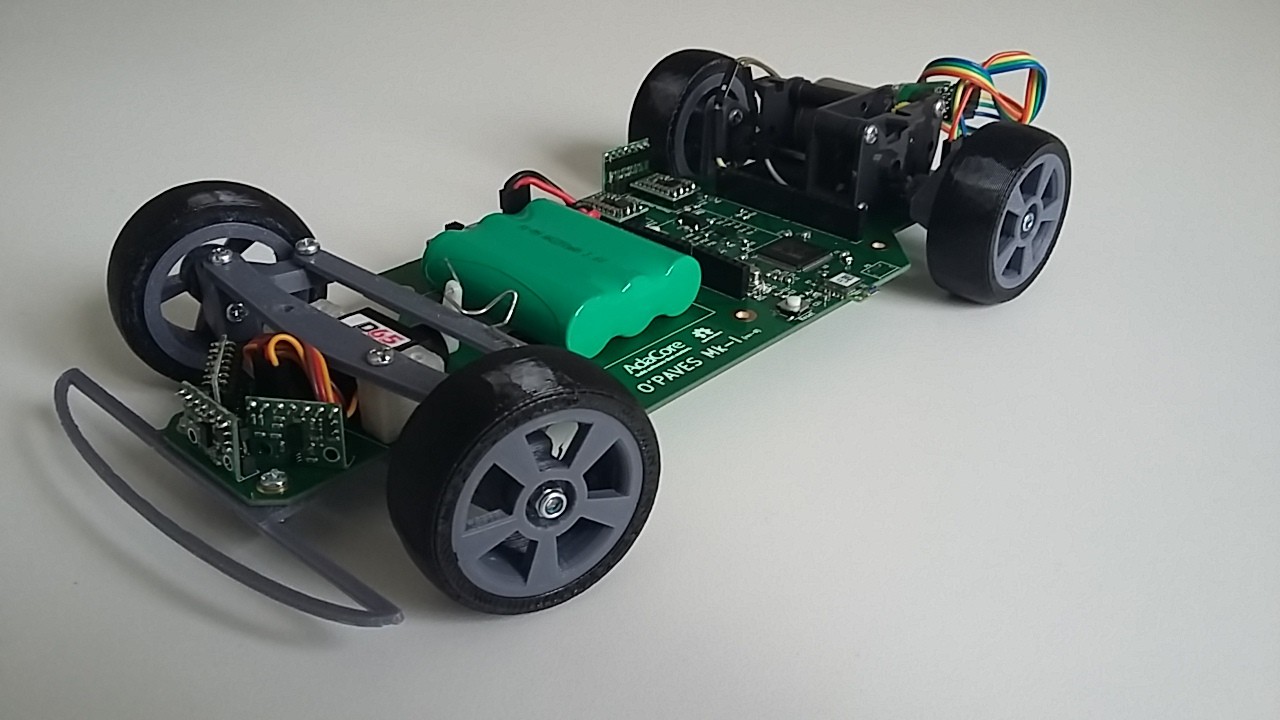
We just finished the assembly of the first hardware prototype and we would like to take this opportunity to walk you through the design.
The main and most remarkable element is the PCB. Inspired by the Crazyflie flying PCB or the FR4 CNC mill, we are using the circuit board as mechanical and structural element of the design. Not only it holds the electronic circuits, it’s also the frame of the car where the mechanical parts (steering, motor, bumper) are attached.
Some of the advantages of using the PCB as a frame are:
Clean design: We can cleanly route electronic signals to every part of the vehicle without having a mess of wires.
Simple and cheap to manufacture: Nowadays, PCB manufacturing is available to everyone for a relatively cheap price.
The remaining mechanical components are either off the shelf parts (RC servo, DC motor and gearbox) or 3D printed parts in PLA (steering assembly, rims) and NinjaFlex (tires).
For the electronic we have an ARM Cortex-M4F (STM32F405) as the main processing unit, five VL53L0x distance sensor to detect obstacles around the car, an inertial measurement unit (BNO055), a Bluetooth Low Energy module for remote control (RN4871), a DC motor driver (TB6612FNG) and two step-up/step-down converter from Pololu (5V and 3.3V).
Even if the assembly requires some solid soldering skills for the LQFN package of the microcontroller, we think that this design meets the goal of providing a platform that is affordable and easy to reproduce. The total cost of all the components is below 200 euros.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.