 Bud Bennett
Bud BennettThe PCBs arrived a couple days ago. I had a lot of trouble getting the accelerometer soldered properly. The technique that worked on the accelerometer was to create small solder bumps both on the PCB and the LIS3DH, use a good amount of flux paste, and solder it to the PCB before other components were mounted. This allowed me to test the connections using a diode checking function on the DVM to make sure that all the traces going to the PIC were properly soldered. Without this check there was a high probability that at least one connection (usually the INT1 pin) was open.
I did not populate the 1N4148 diode. The LIS3DH operates just fine with a 4.2V supply. I should have implemented an option for a shorting resistor across the diode, but just put a short solid wire across it instead.
With a working PCB, I measured the following:
Supply Current at idle = 12.2µA
Charging current = 75mA (including the LED current)
This idle current is pretty close to that expected for the system using the following conditions:
- The PIC idle current is around 0.7µA during sleep with the watchdog timer running.
- The LIS3DH is running at 25Hz and expected to consume 6uA @ VDD = 3.3V. But the current nearly doubles when VDD is increased to 4.2V.
- The battery charger IC contributes less than a few hundred nA of leakage current drain on the battery.
I was expecting to have the LIS3DH run at 10Hz and draw only 4µA, but increased the ODR to 25Hz and the duration of the interrupt event to 400ms to lessen the chance of a false free fall detection. Even so, with 12µA idle current I expect the 120mAh battery to last about 1 year between recharges, depending upon how often it is tossed.
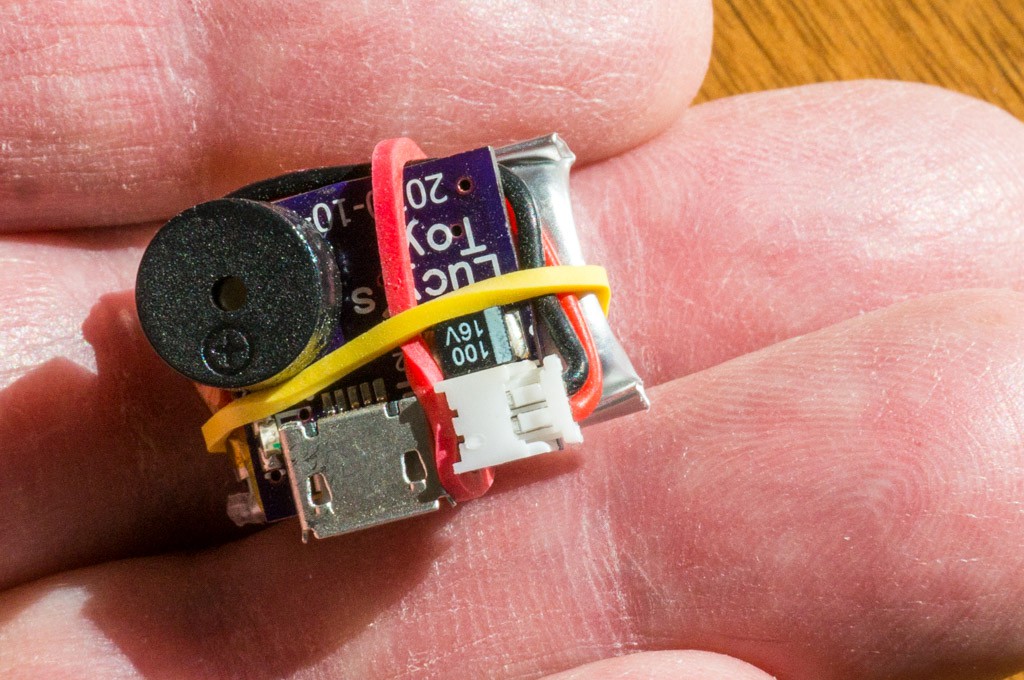
It's a pretty small package -- even with the battery attached. The battery is contained temporarily with a couple of small rubber bands. Hot glue will probably be the permanent attachment method. I've tossed it a few times. It doesn't always trigger the beeper. The package is so small by itself that the unit tends to revolve in flight and might not drop below the free fall threshold. There have been quite a few false triggers as well. I'm hesitant about removing the PIC and reprogramming it with different parameters for the accelerometer. Every time I have desoldered the PIC I have been unable to reprogram it -- no idea why at this point. Perhaps the better approach would have been to use a DIP with a socket for experimentation and then switch to an SOIC after getting the parameters right.
The first testing of the unit in one of Lucy's existing plush toys did not go well. Lucy regarded the beeper as a violation of one of her favorite toys and wanted nothing to do with it. I ordered a different plush toy, with a velcro pouch to hold the beeper. Hopefully, Lucy will respond better to a new toy with the beeper installed. I'll add a new log with those results when the new toy arrives.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.