 Frederic L
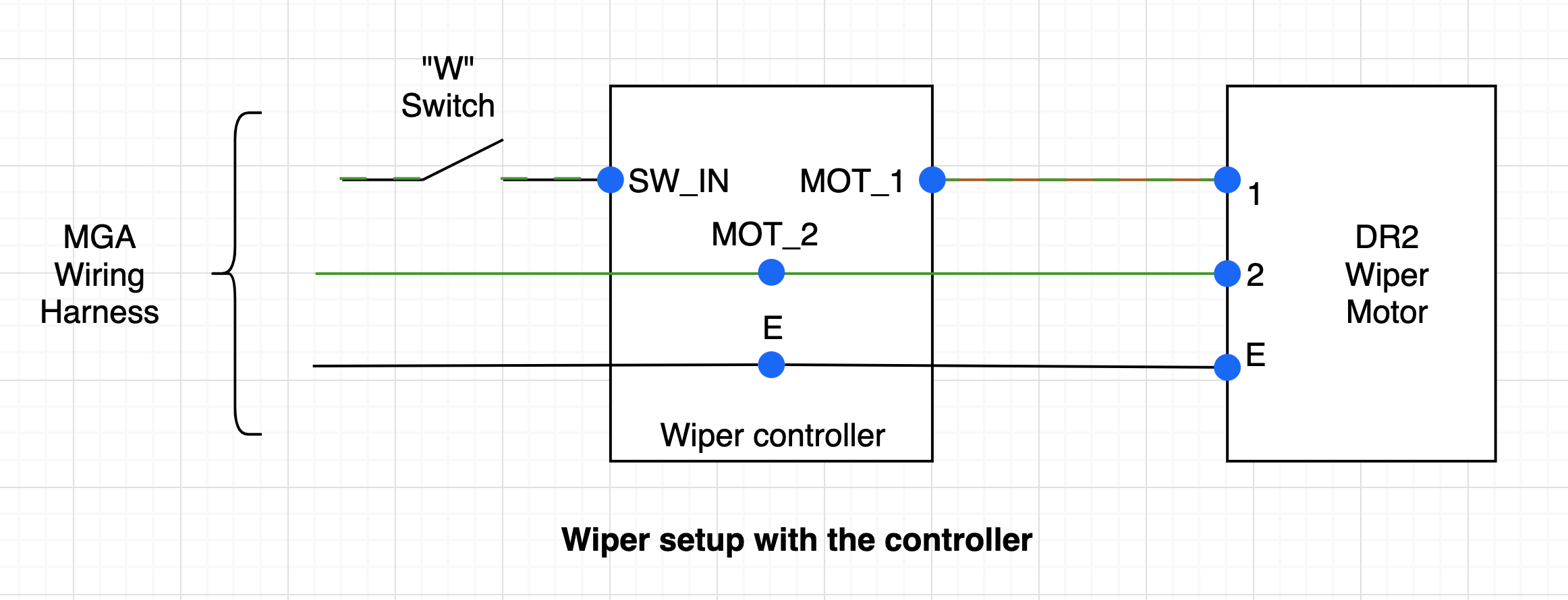
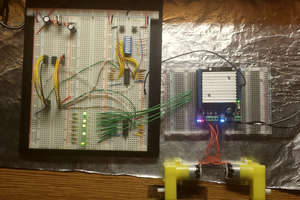
Frederic LSome classic British cars such as the MG MGA or Triumph TR2 came with a single speed DR2 wiper motor. When encountering rain of various intensity, the single speed is just not appropriate 90% of the time. Here is a fully customisable, Arduino based, multi frequency controller that is non-destructive and fully reversible for your car. Just wire it between the original switch and the motor and you're ready to go.
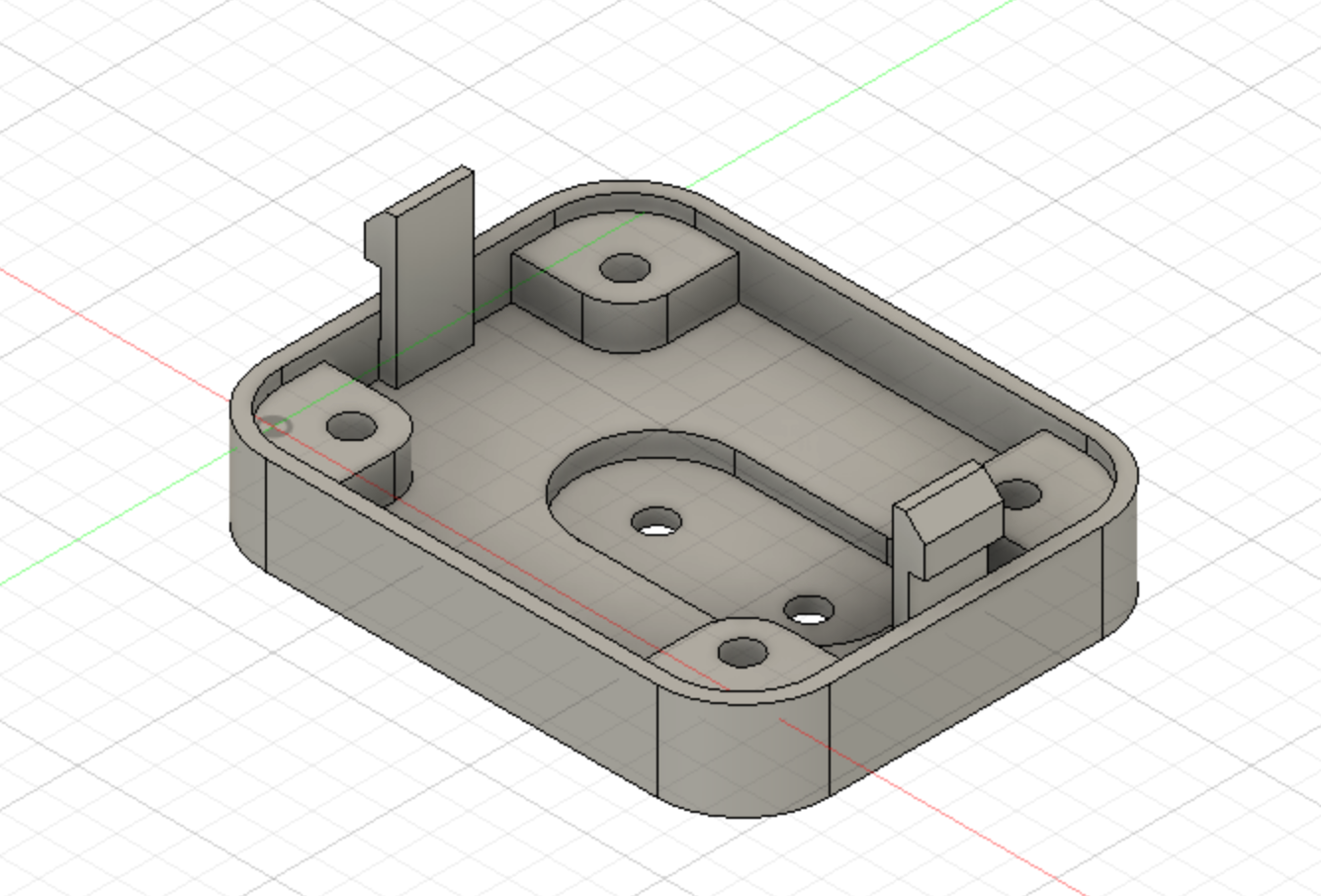
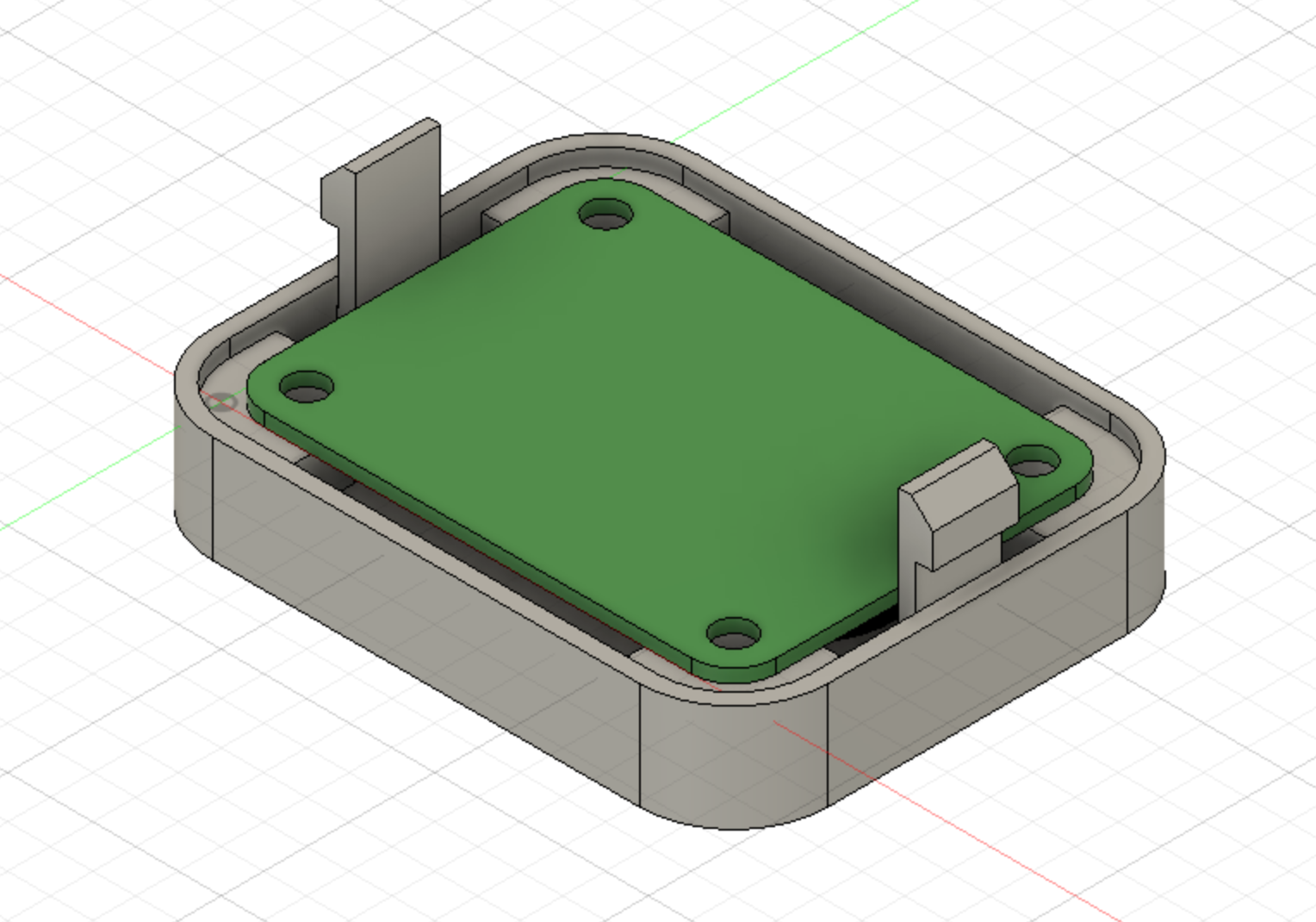
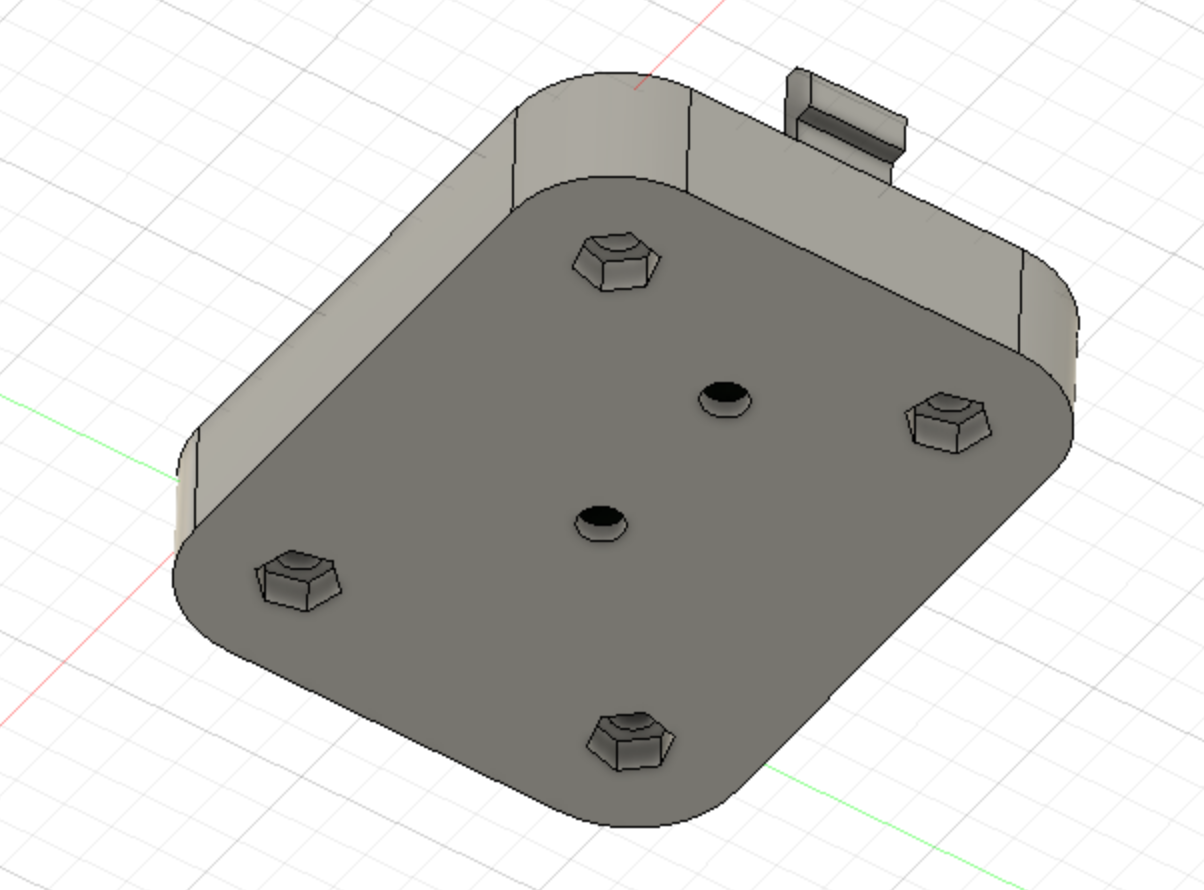
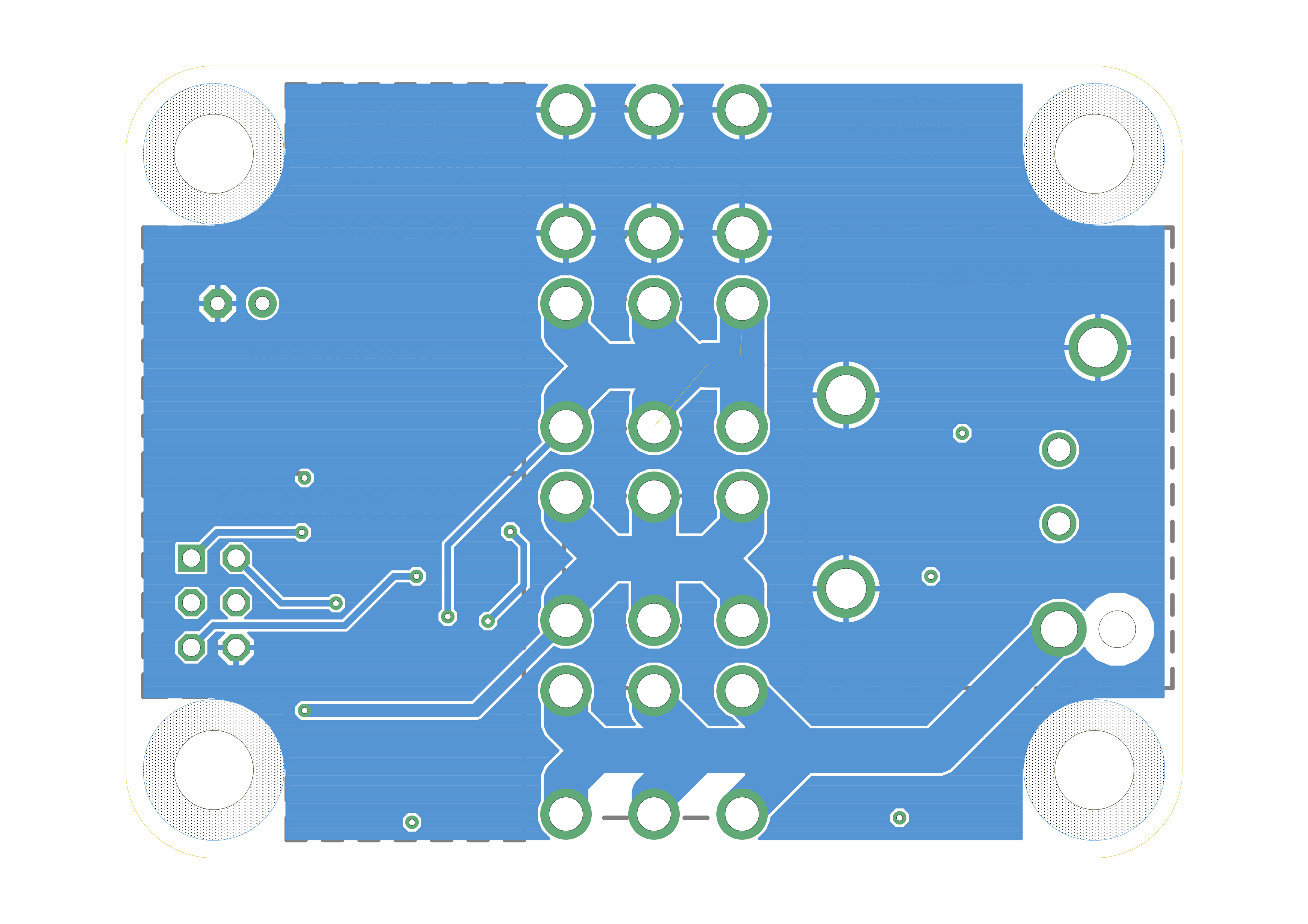
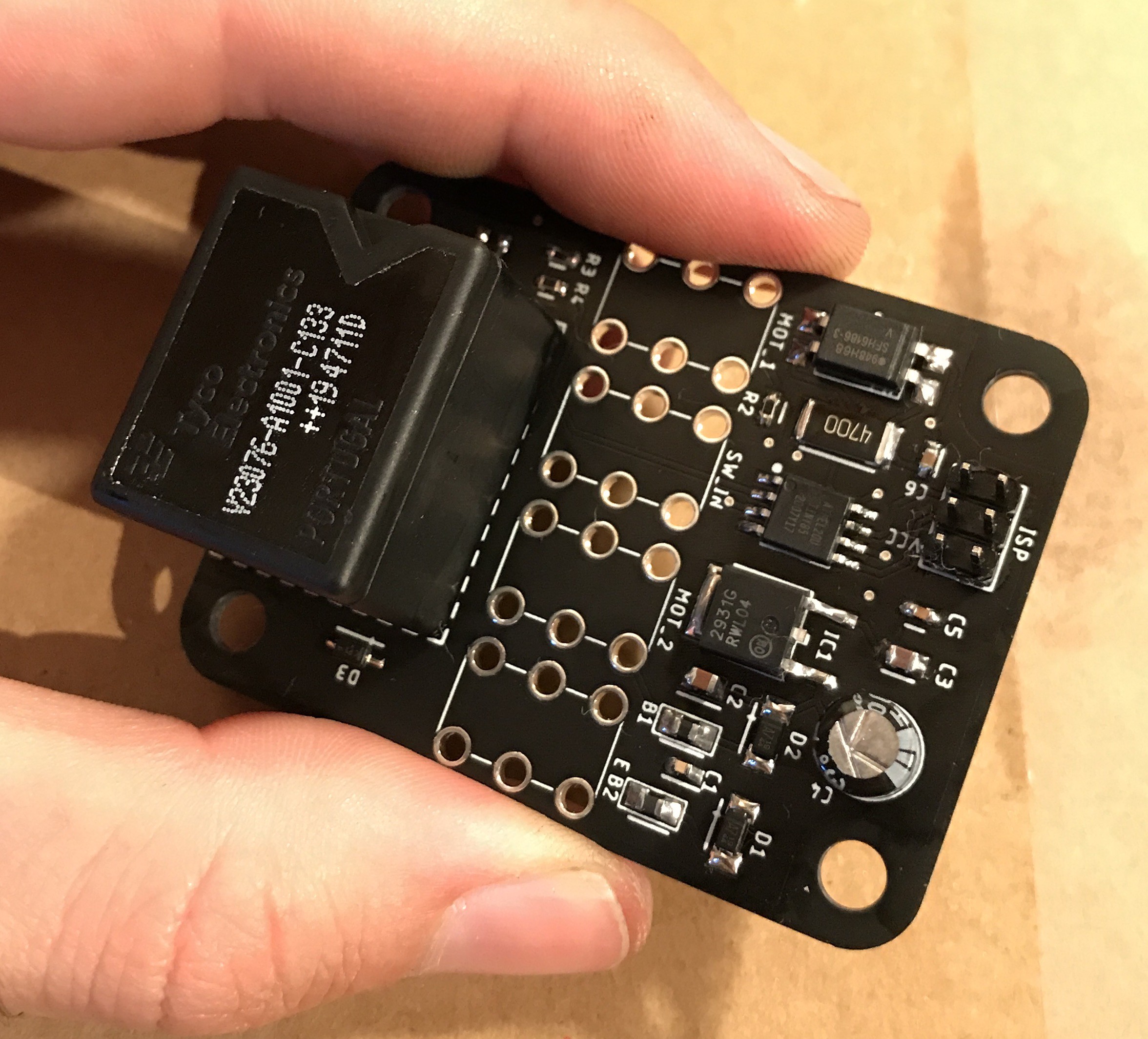
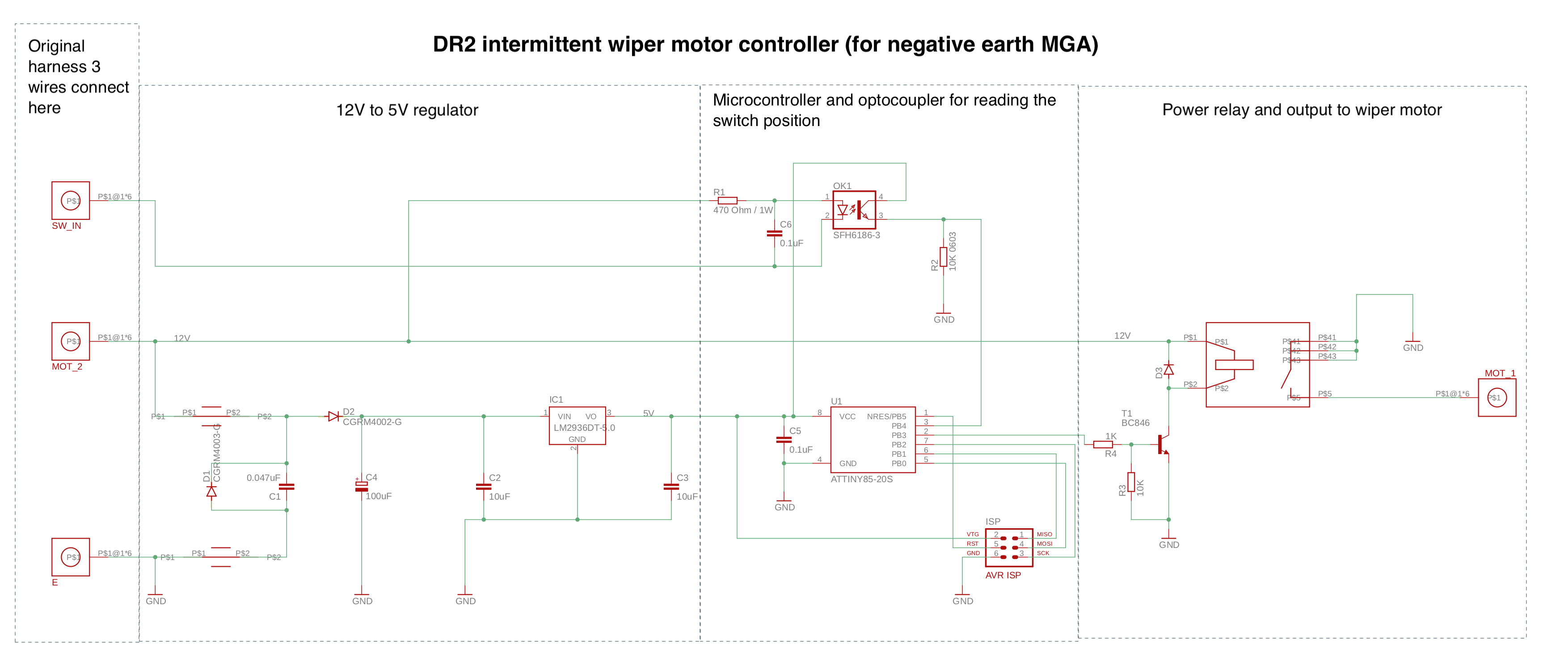
Follow the project logs (starting here) for a complete description of the controller, schematics, PCB layout, and final result (video above).
Feel free to ask any question, I'll do my best to answer.









 leumasyerrp
leumasyerrp
 Hulk
Hulk
 Tron9000
Tron9000
That's really neat, I had been often contemplating something like this for my old VW's