 Nick Rehm
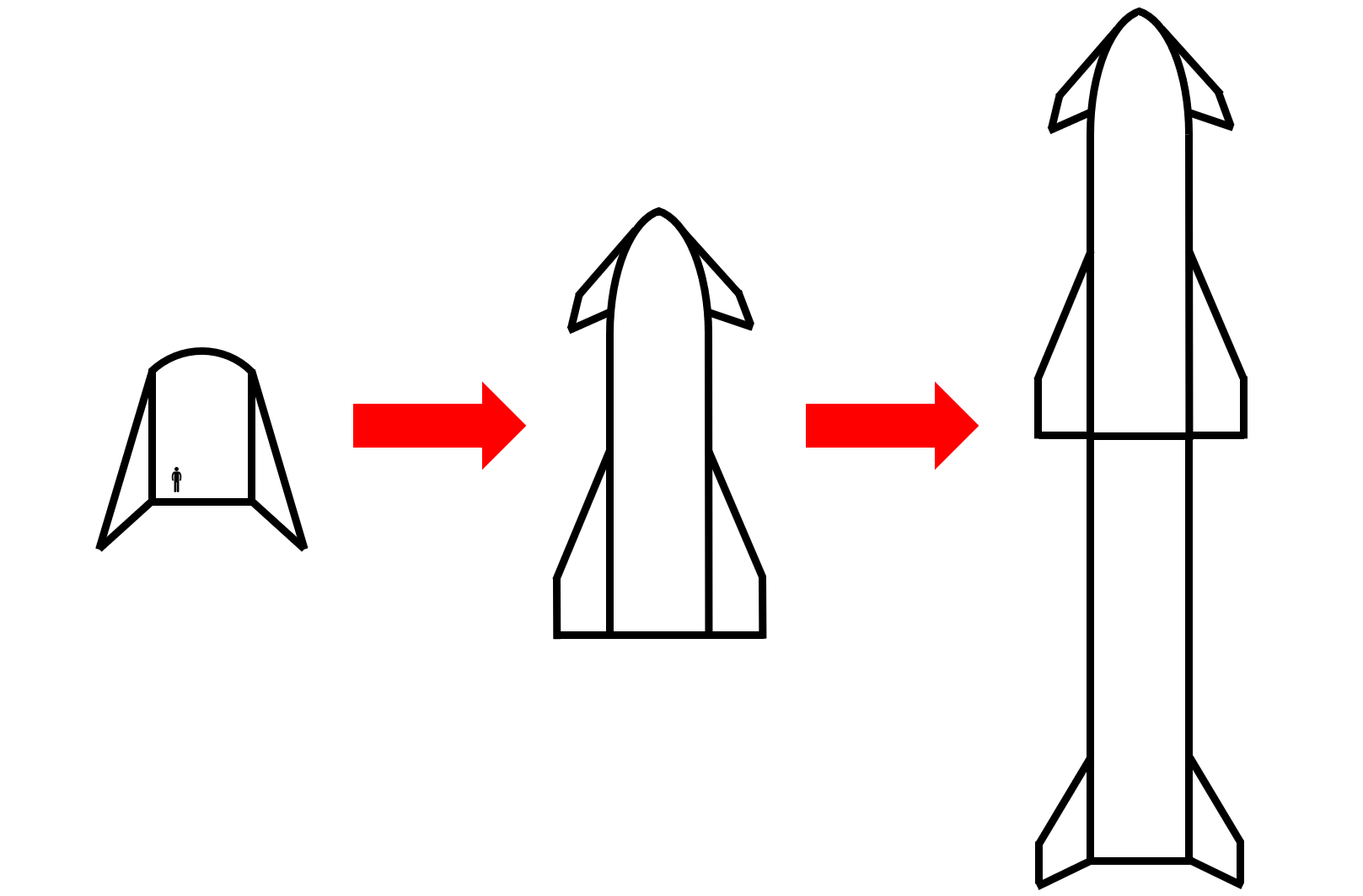
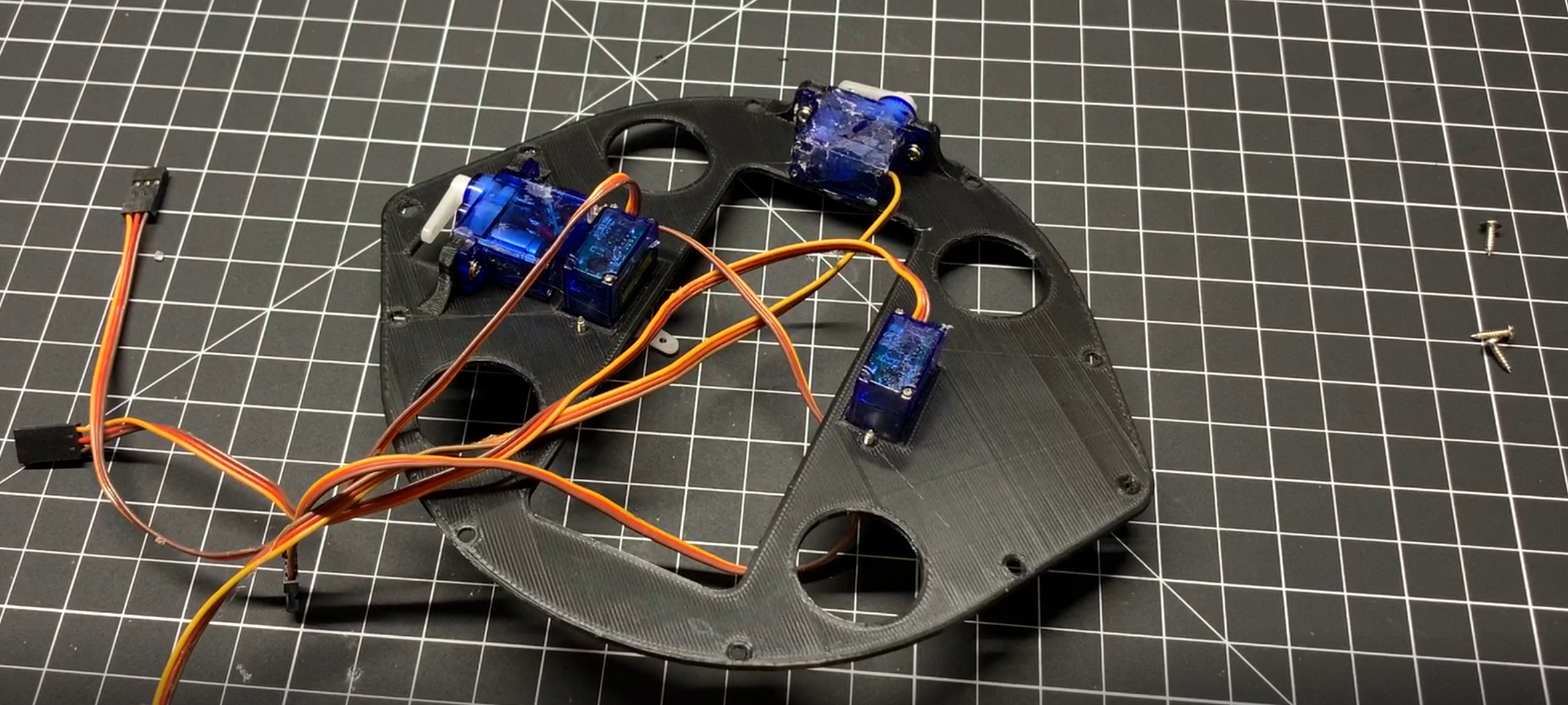
Nick RehmI started my Starship program the same way SpaceX did--with a Starhopper test platform. I learned many useful things from this exercise before I invested in real hardware for the Starship build:
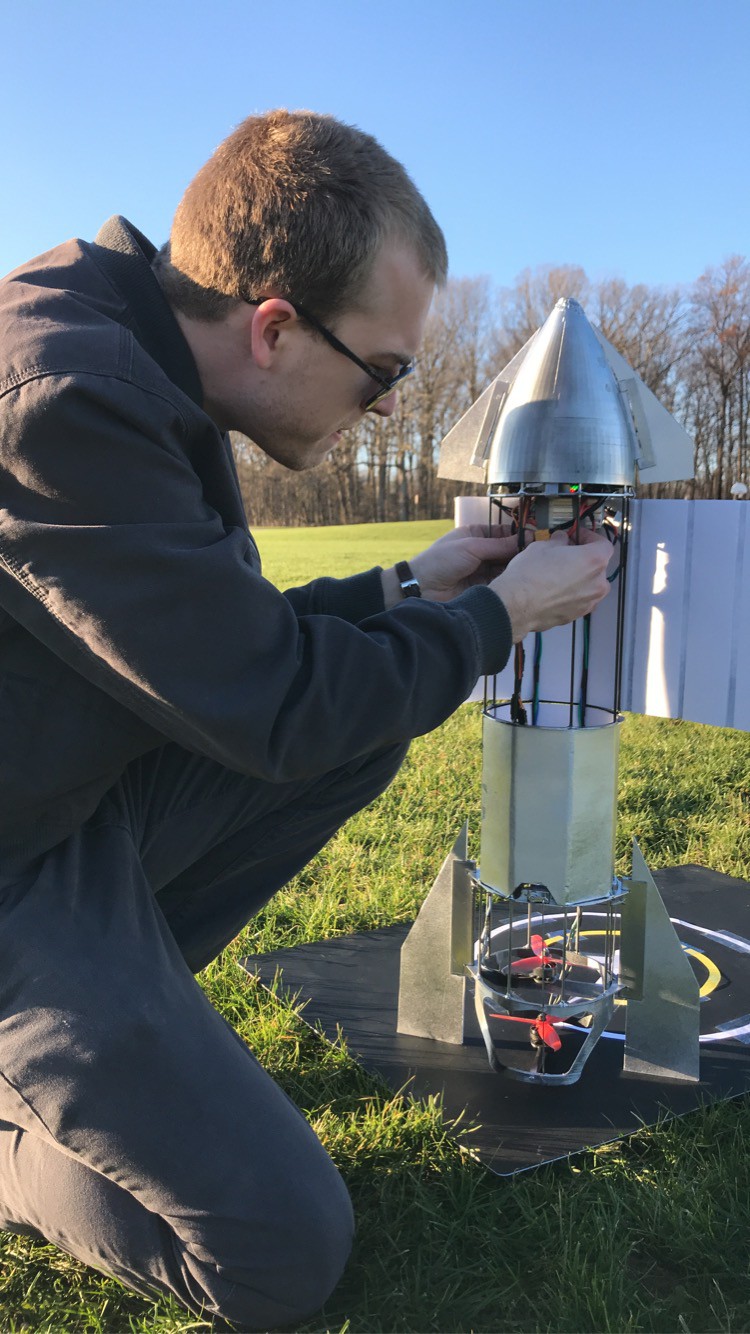
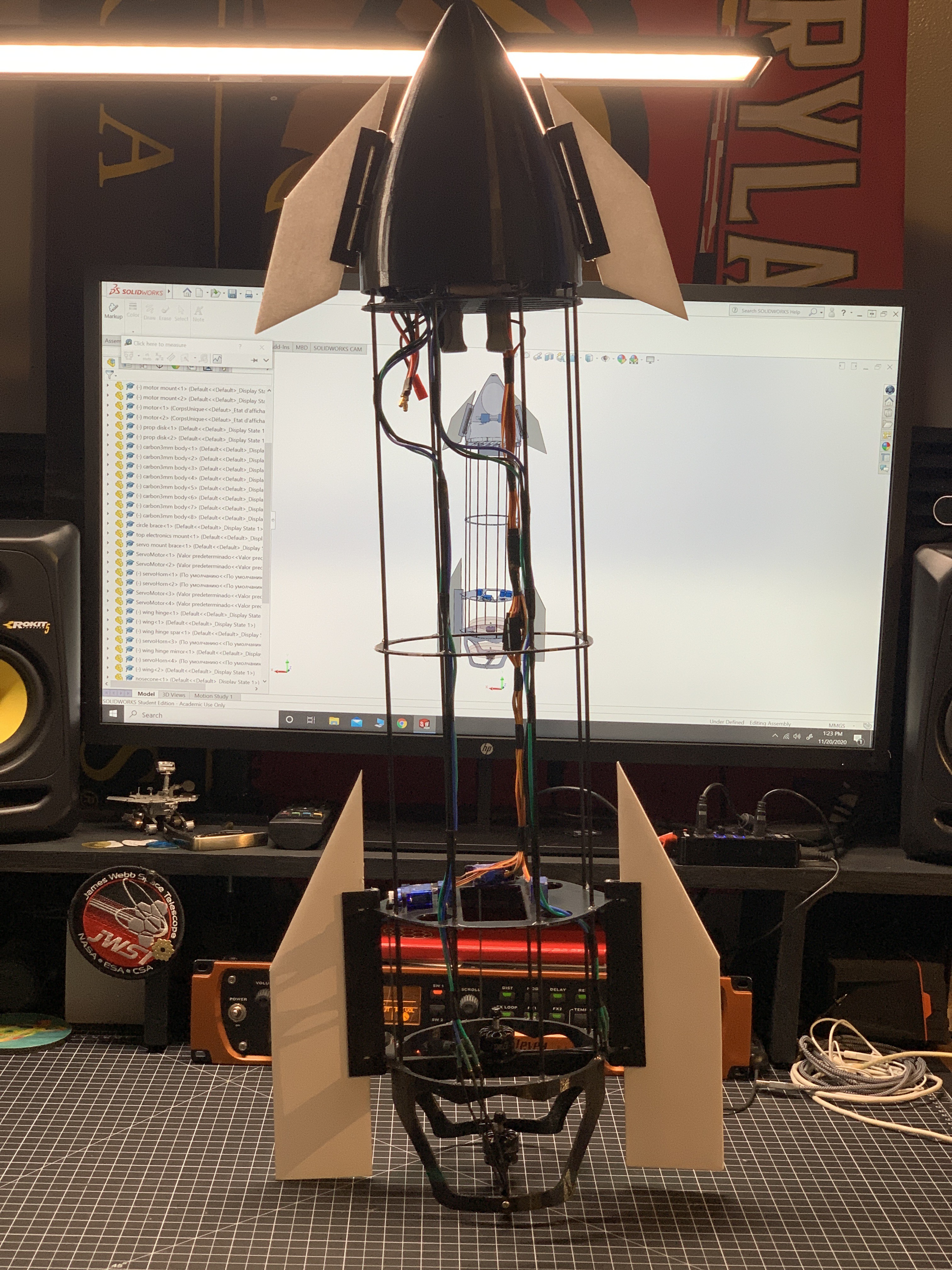
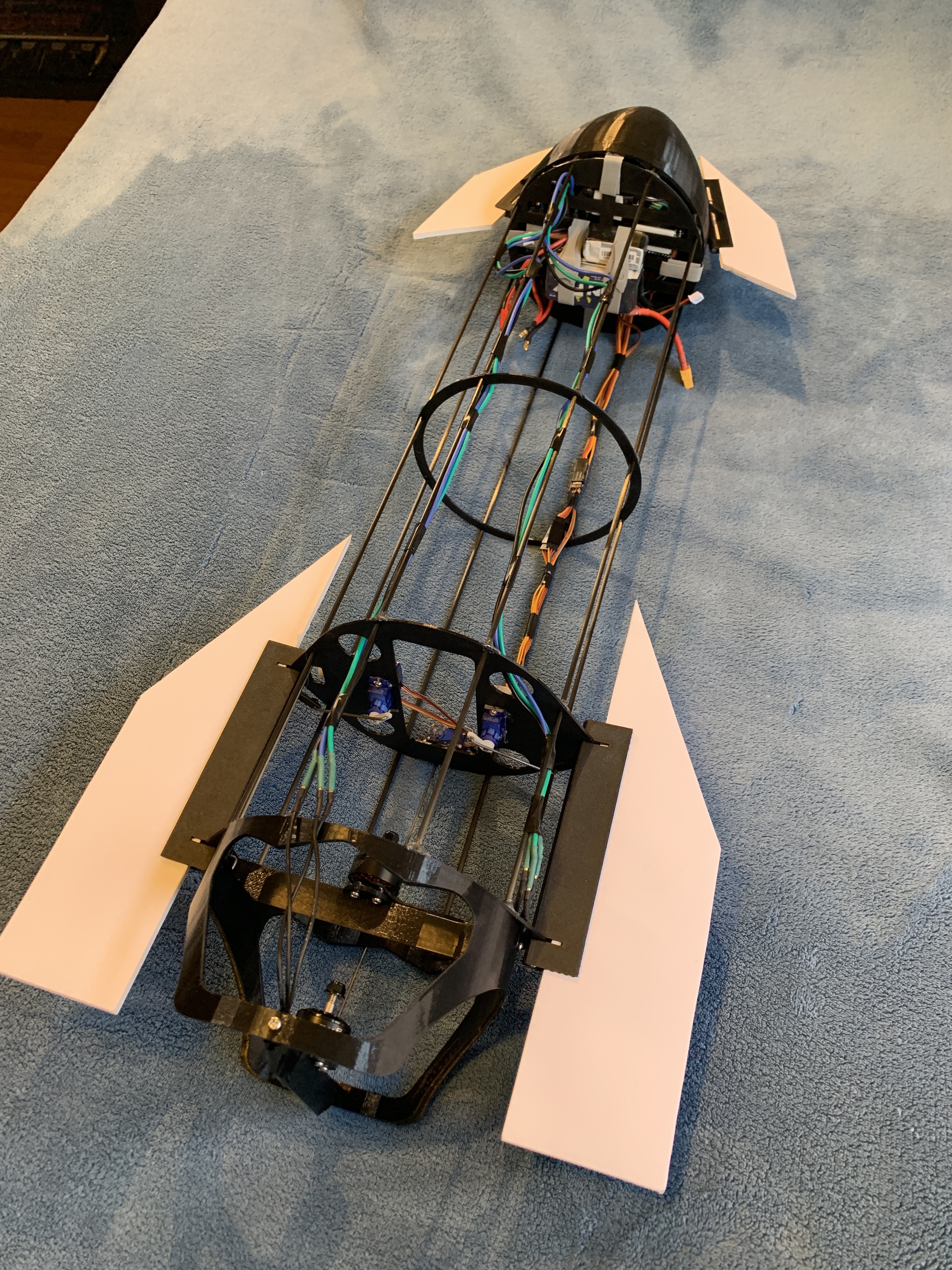
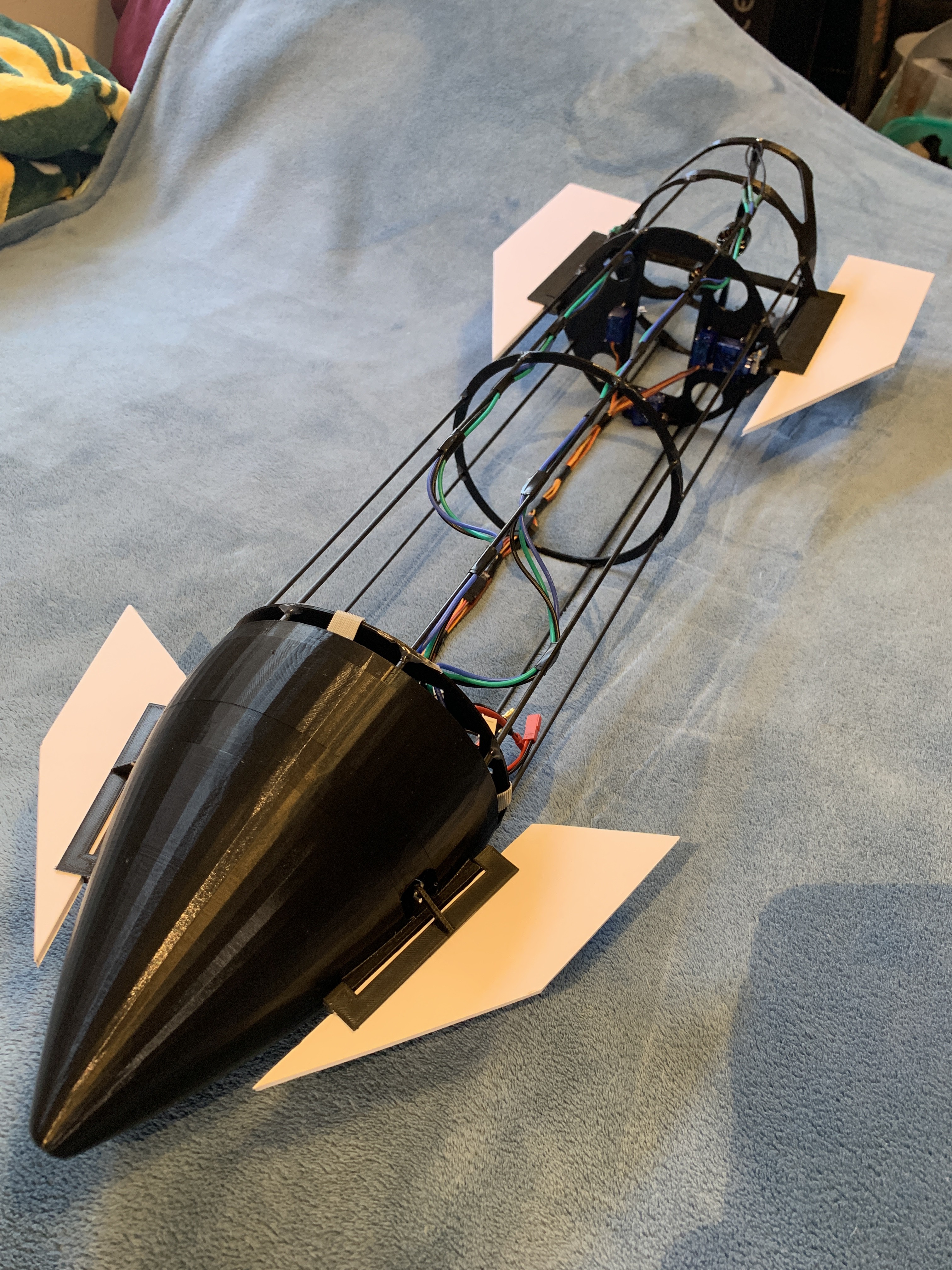
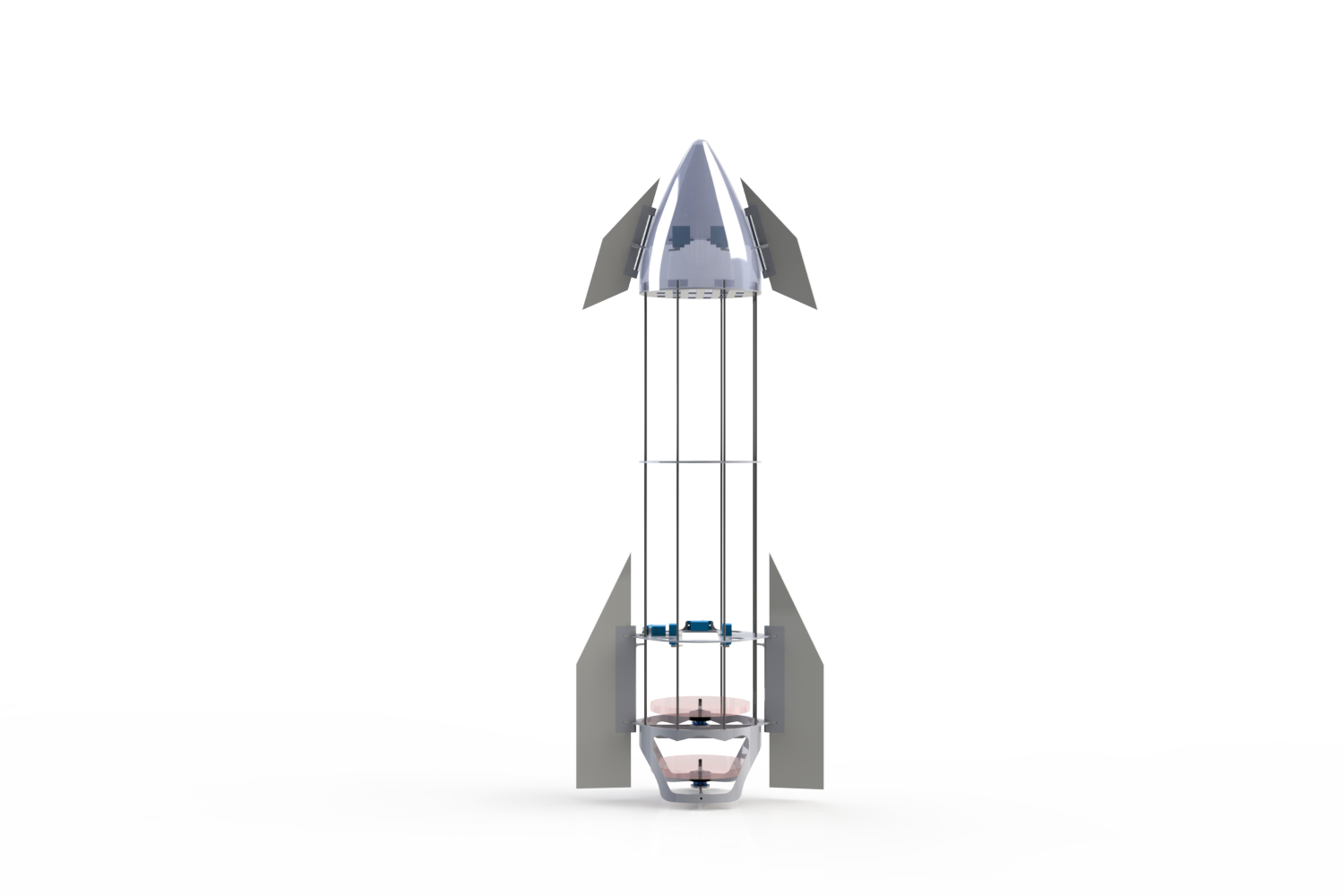
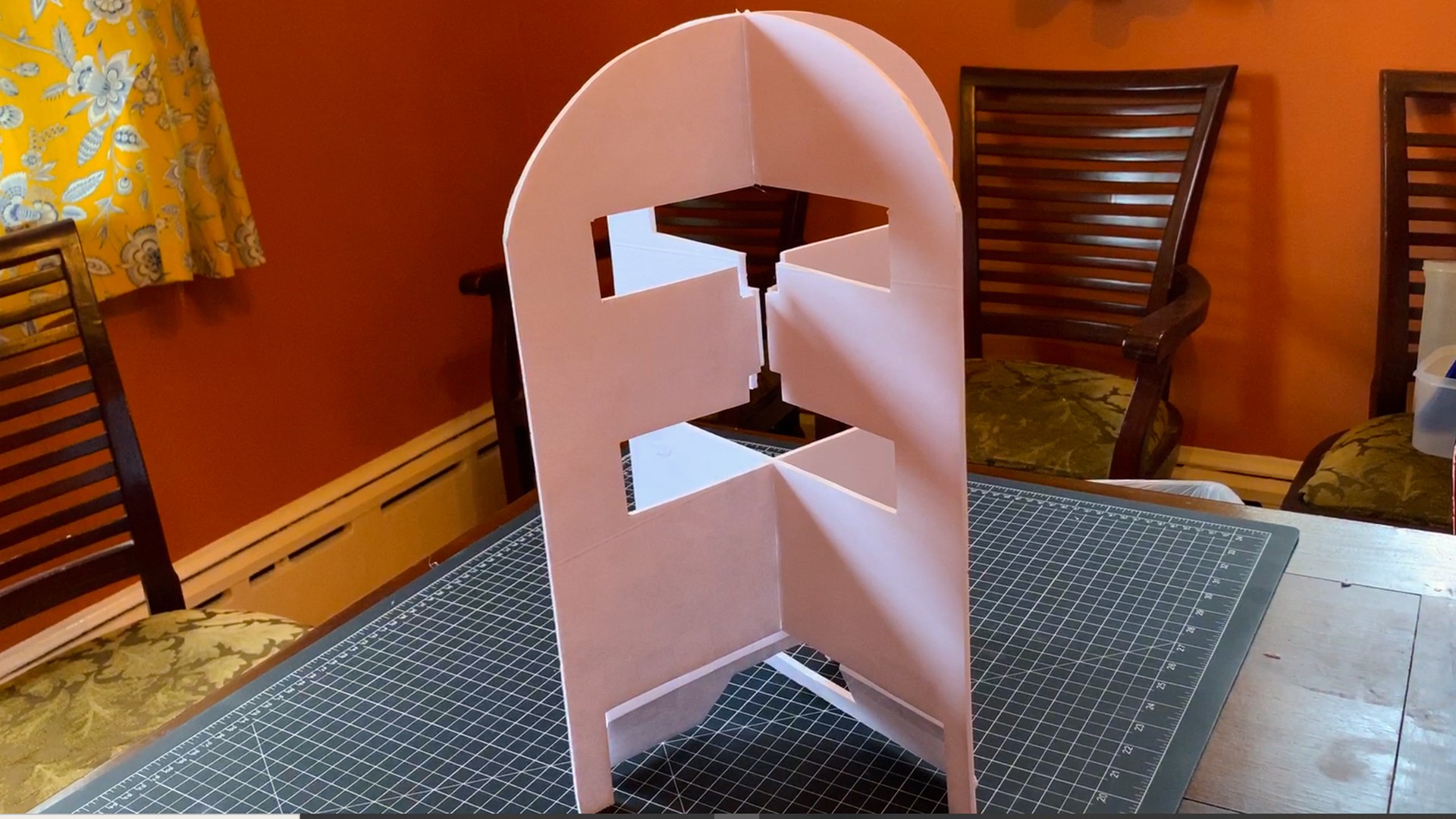
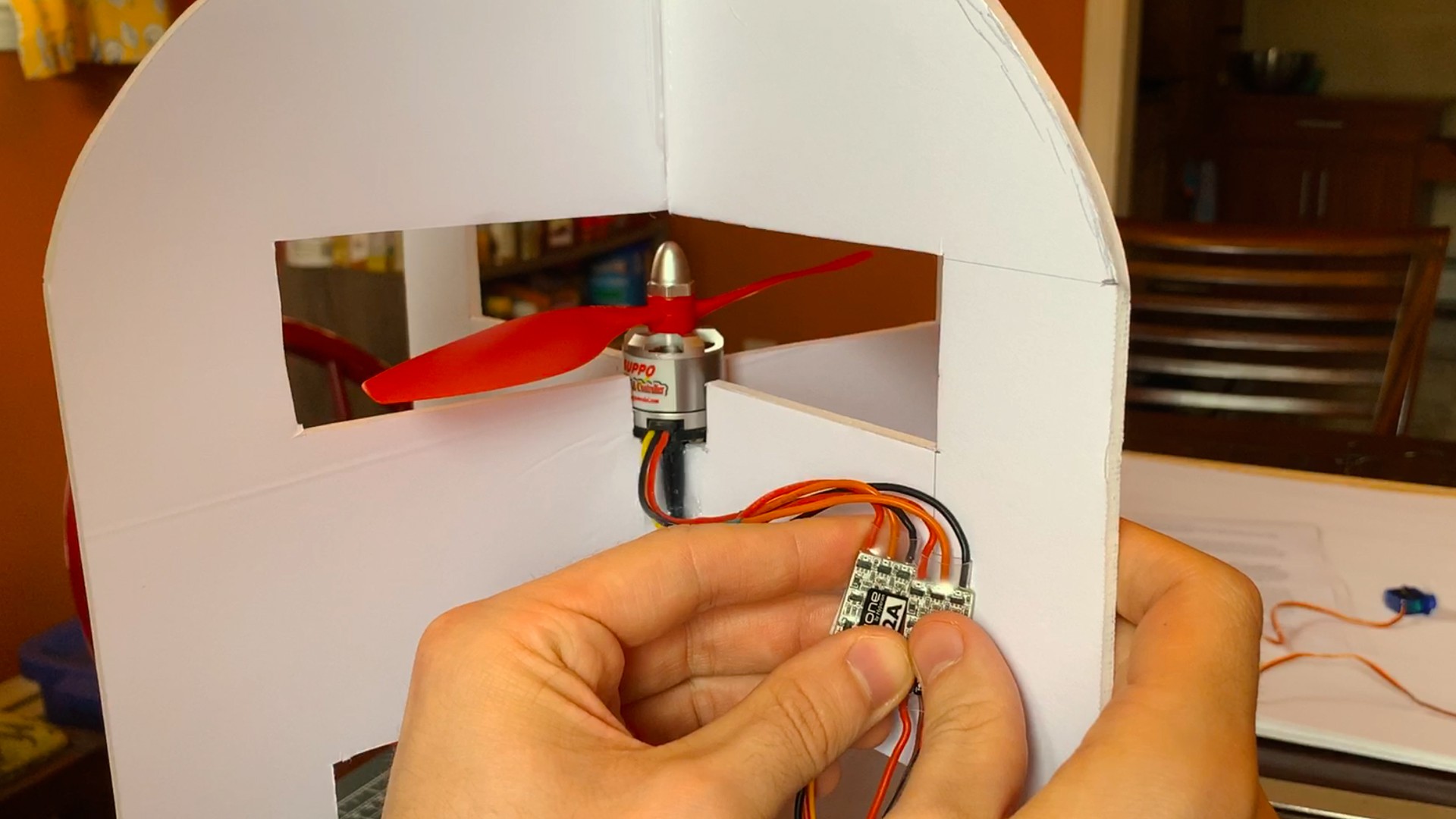
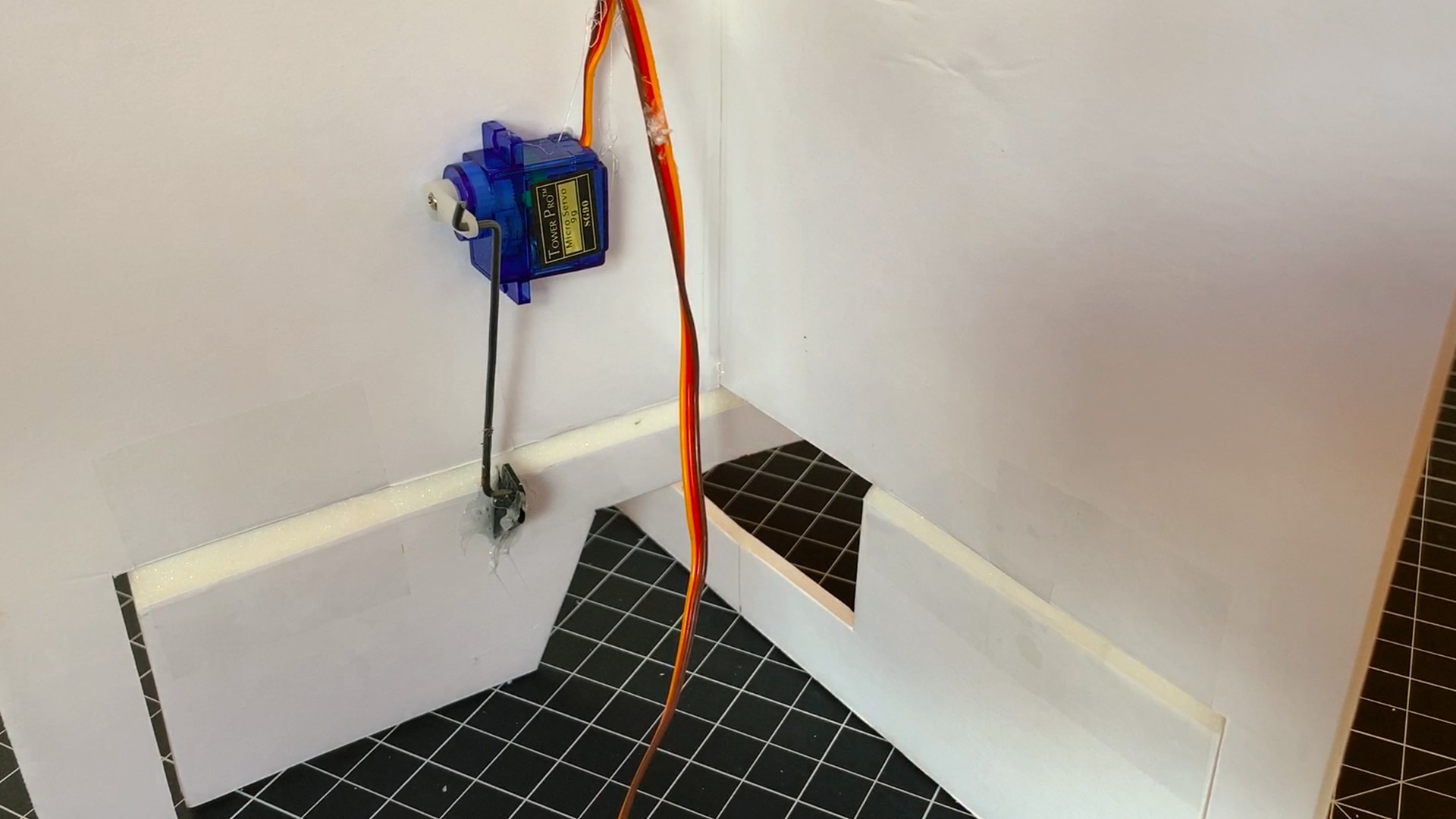
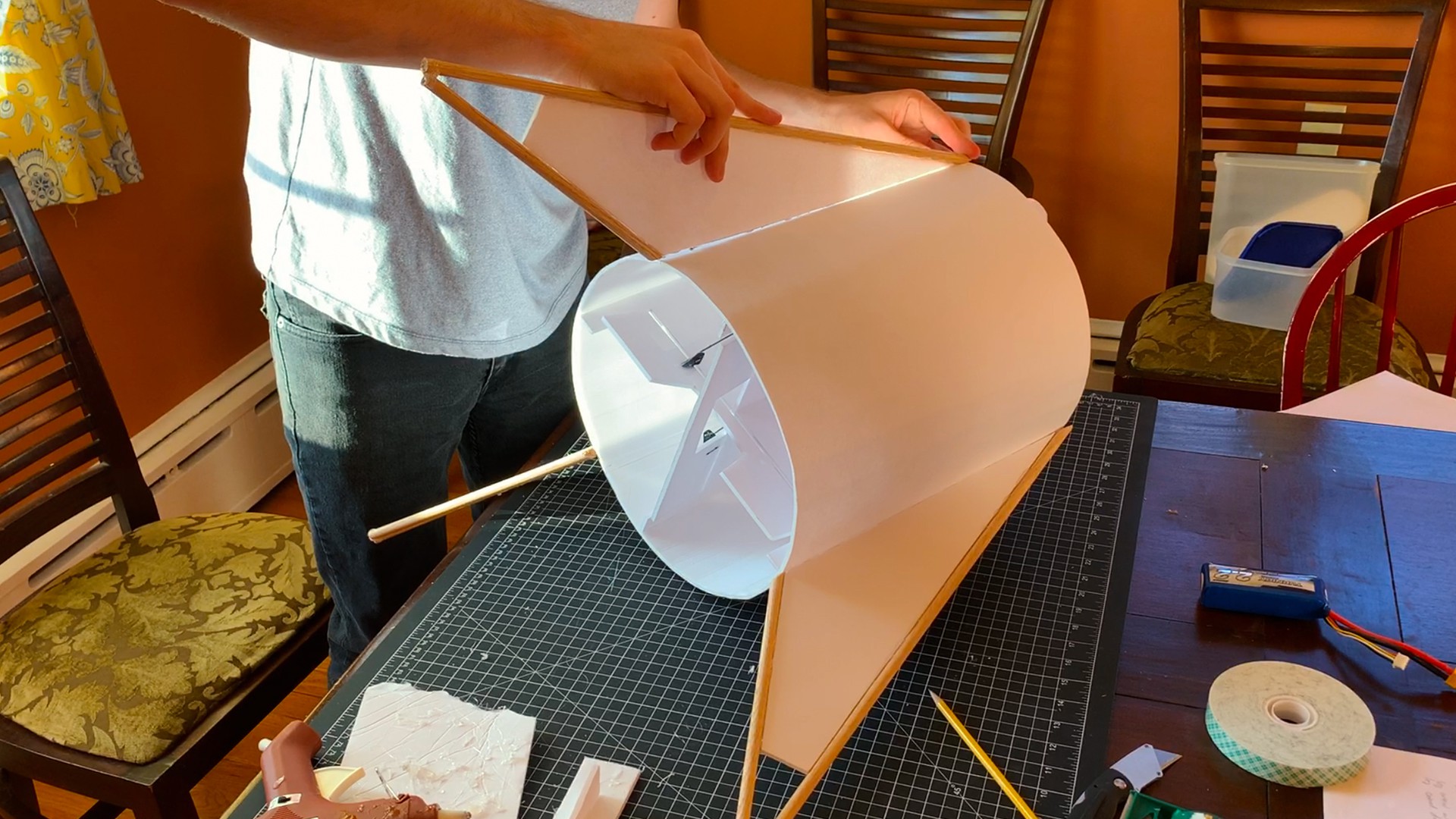
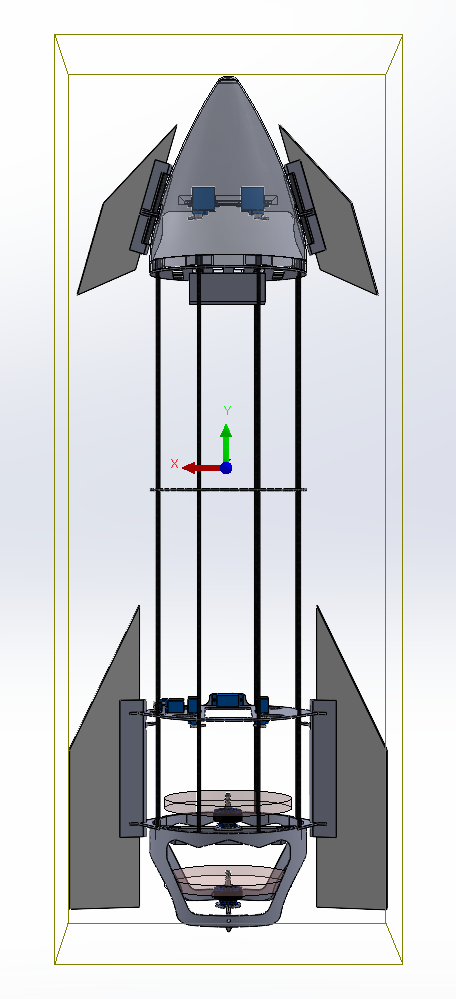
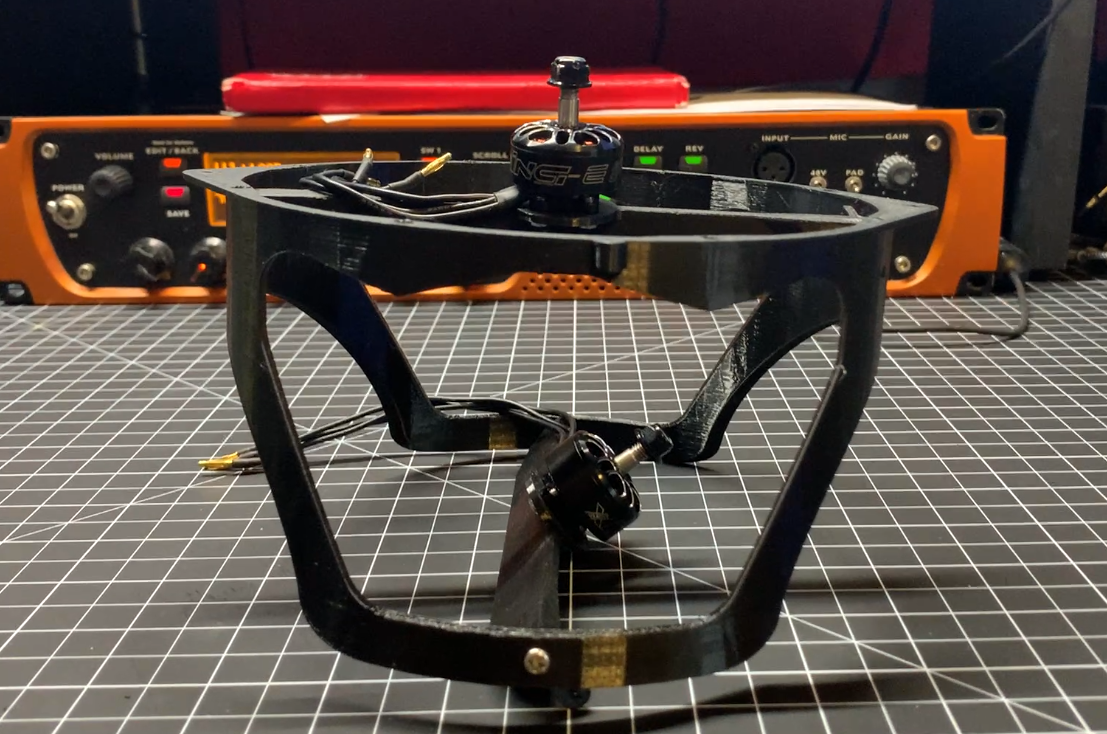
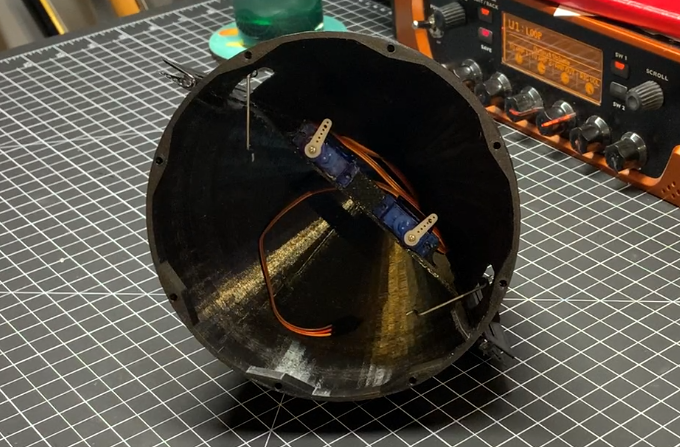
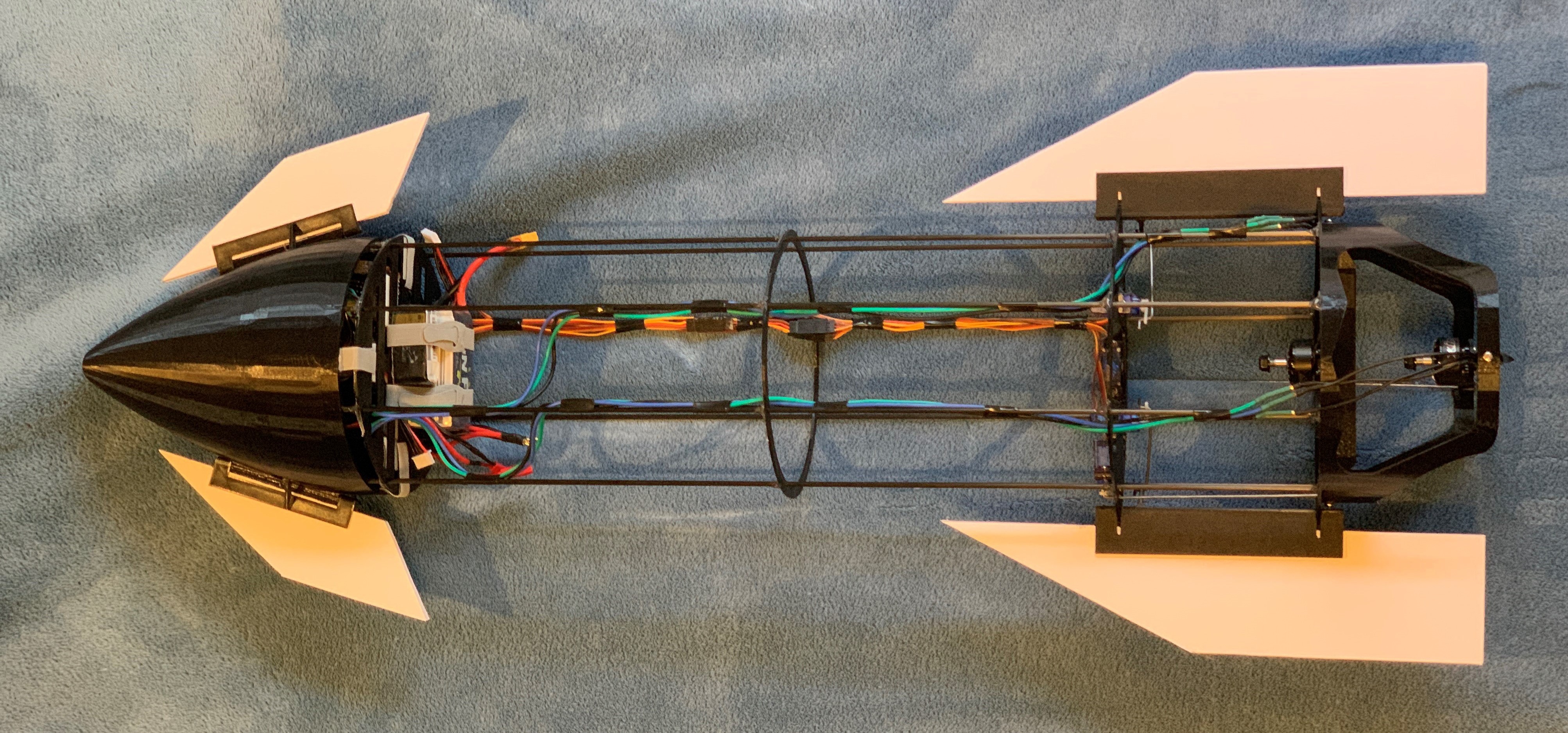
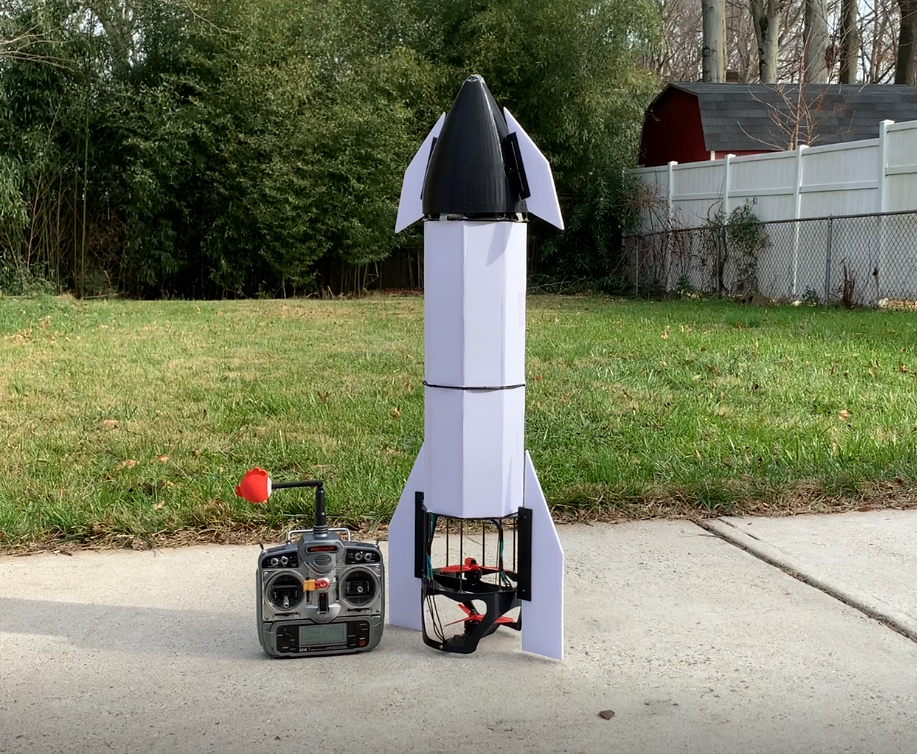
With control via thrust vectoring (roughly) figured out, the next step was to translate what was learned on the Starshopper to a Starship. The Starship hovers with two slightly more powerful brushless motors, with the addition of fore and aft lifting surfaces that enable control in the descending skydive or belly flop mode:
A little more tuning on the starship is needed before we consider building a superheavy booster to launch it with...
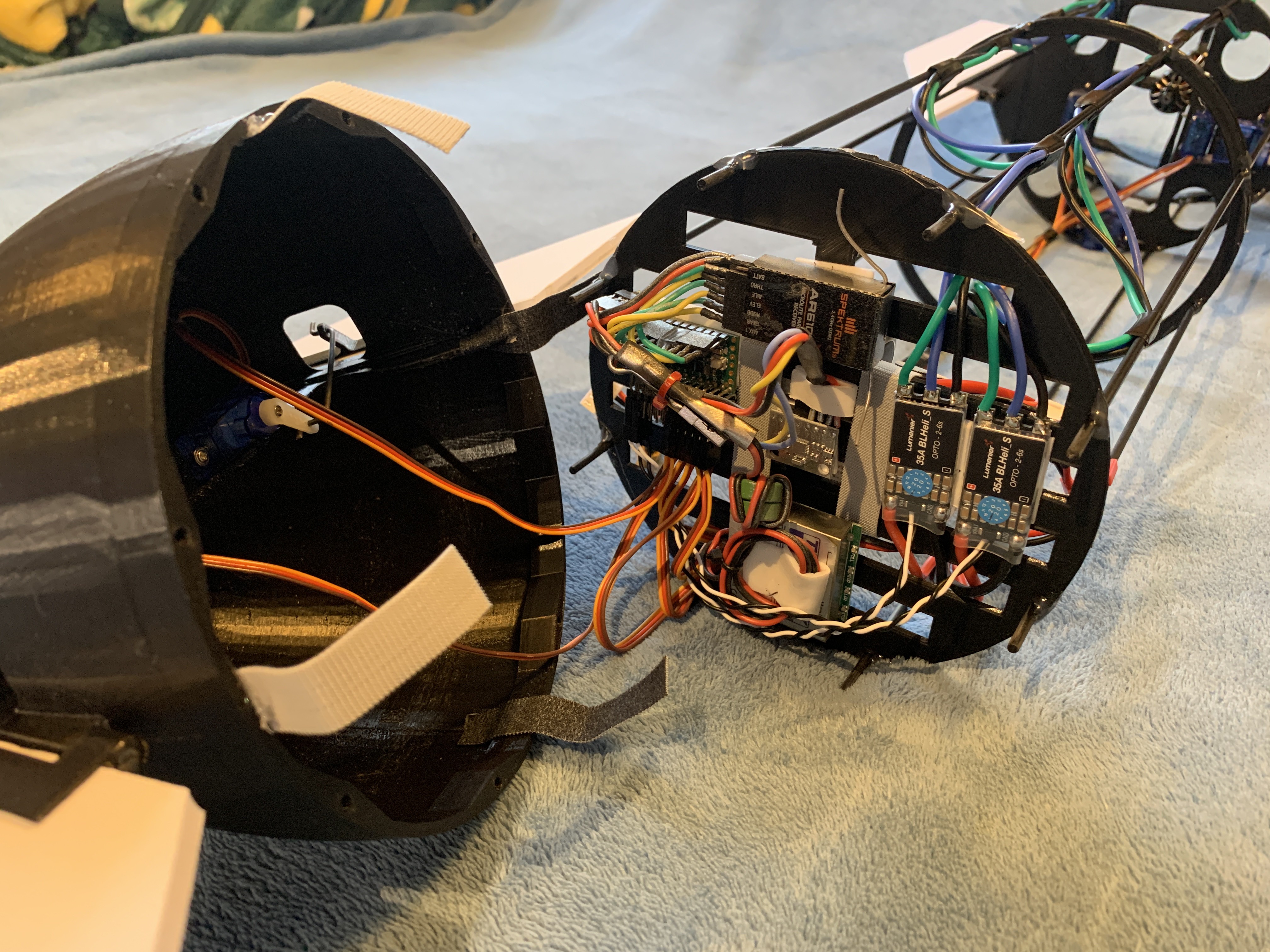
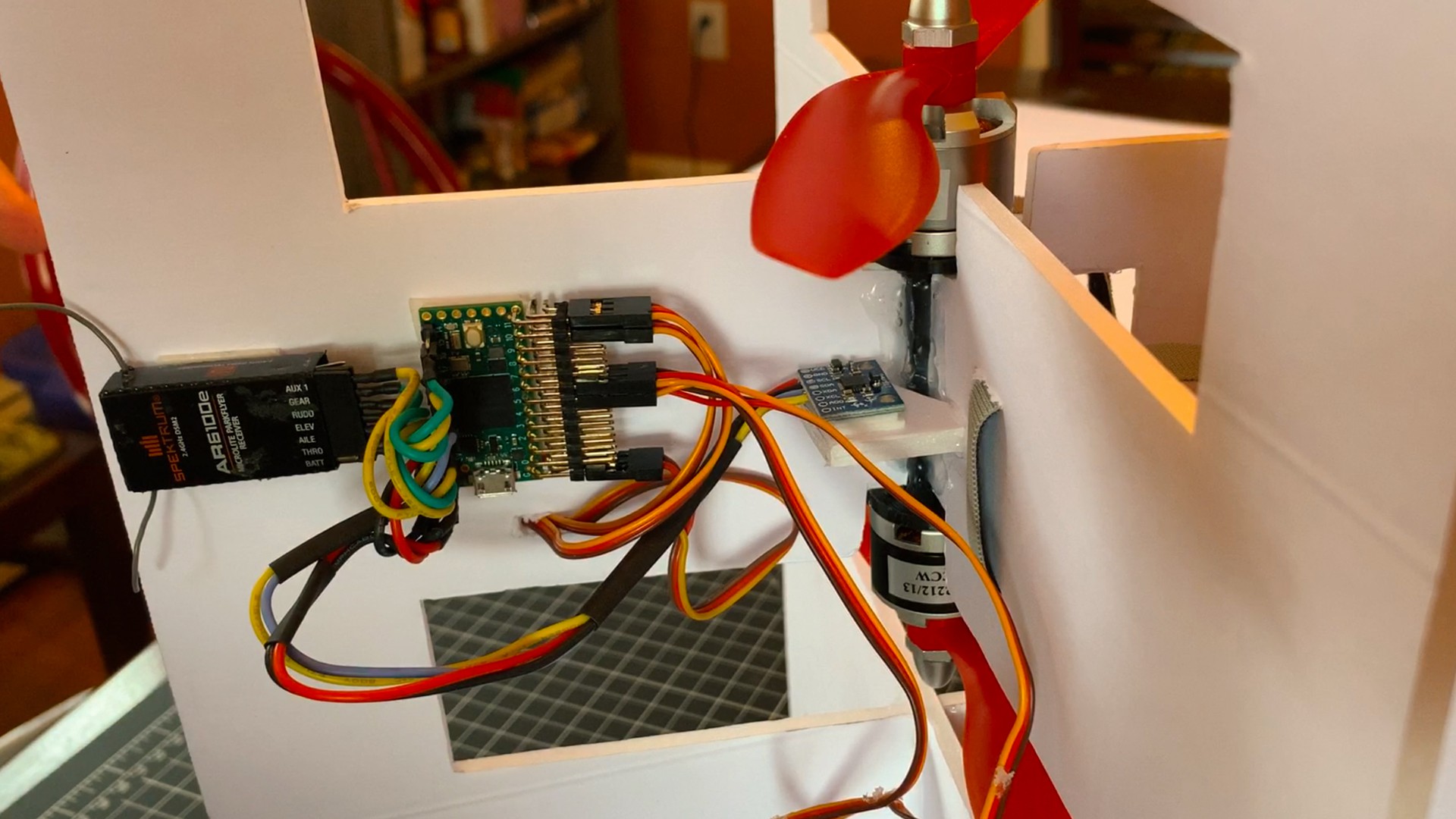
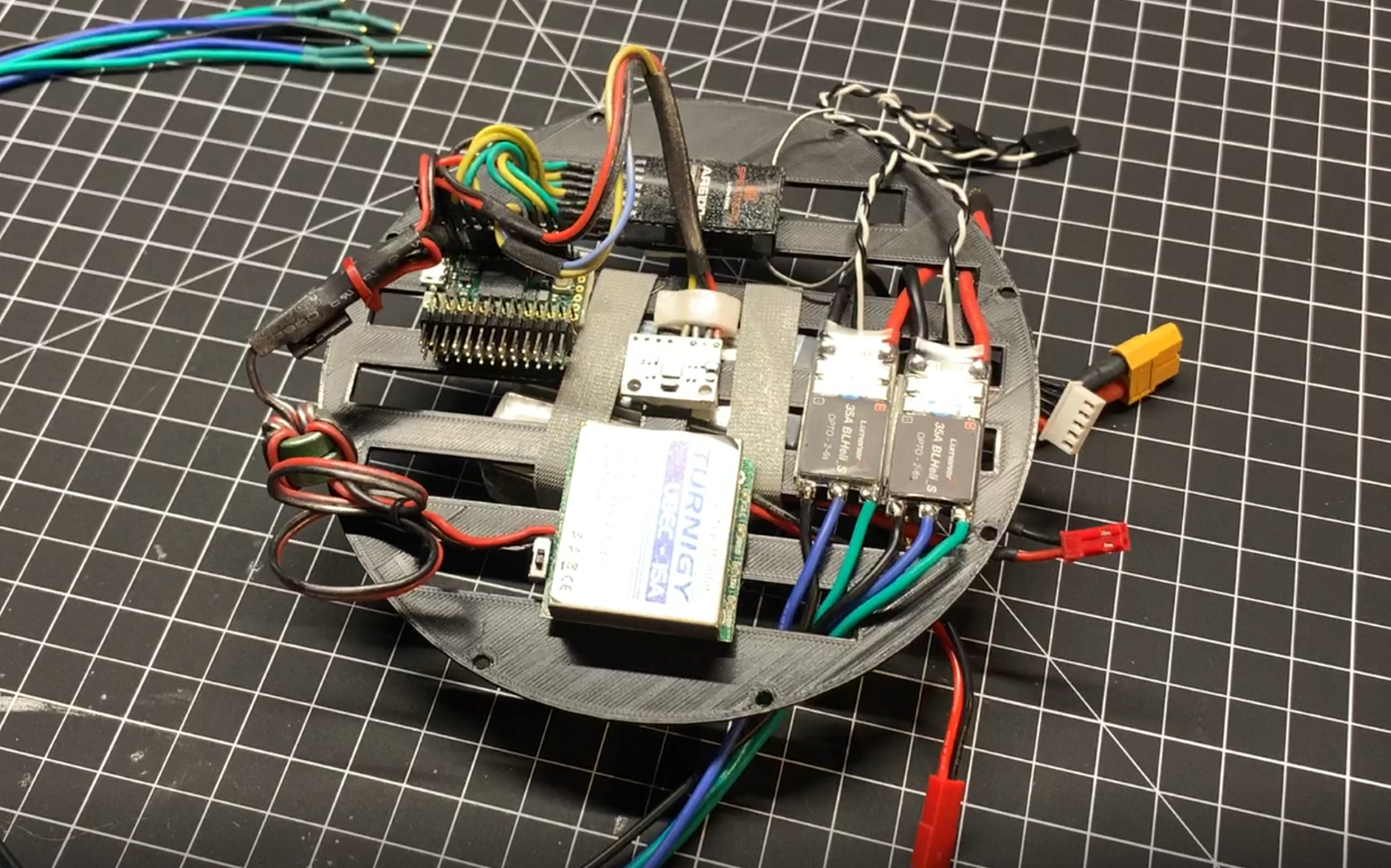
For flight control and stabilization on this project, I'm using my open-source flight controller that is Arduino-based and runs on the Teensy 4.0 with MPU6050 IMU: Project Page











 Hacker House
Hacker House
 ProtoVoltaics
ProtoVoltaics
 Ronald Jaramillo
Ronald Jaramillo
 lmckeega
lmckeega
Is there any alternative microcontroller for teensy 4.0?