 Peter Wasilewski
Peter WasilewskiHey!
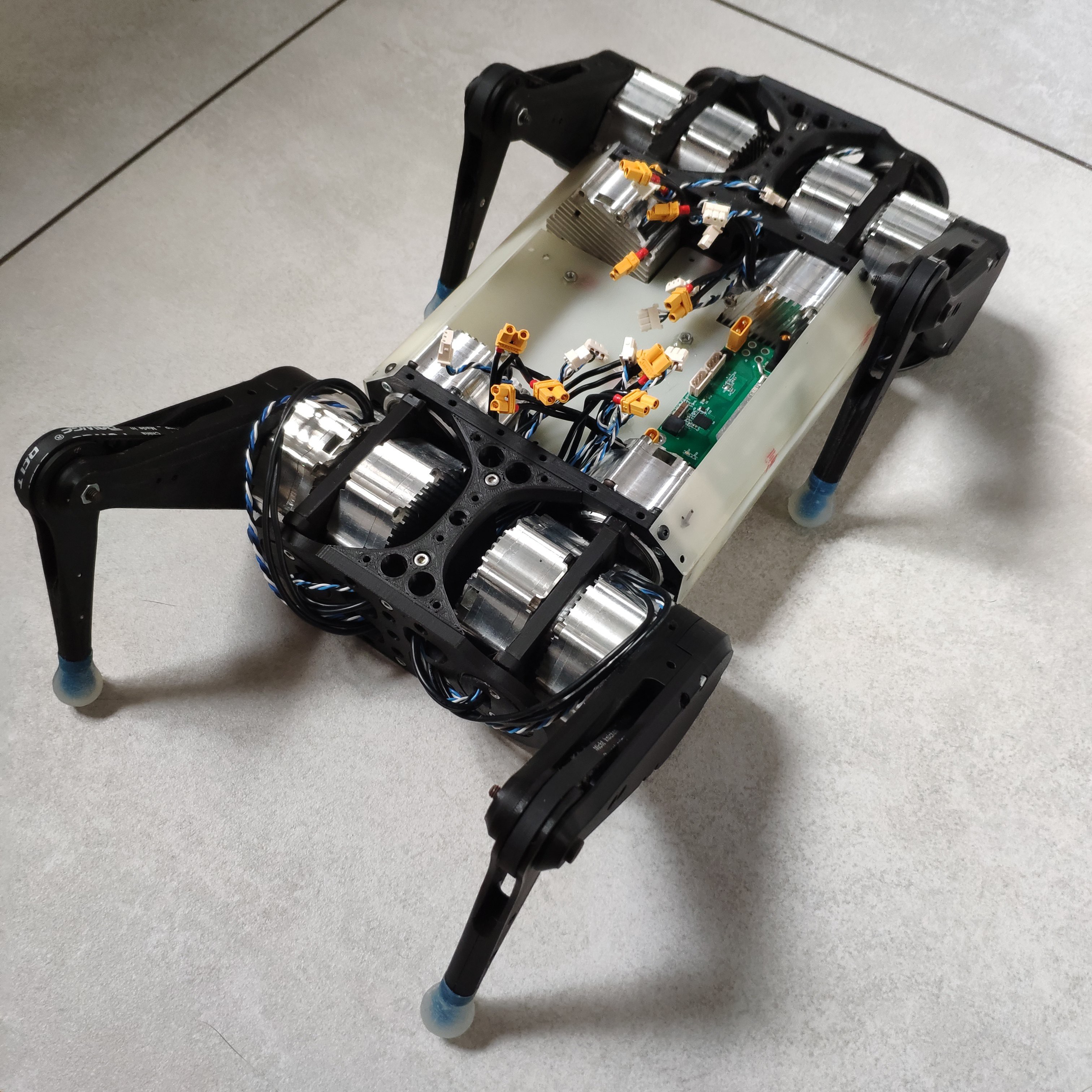
Just recently I have finally finished the first Wolfie prototype:

Here are some assembly photos:
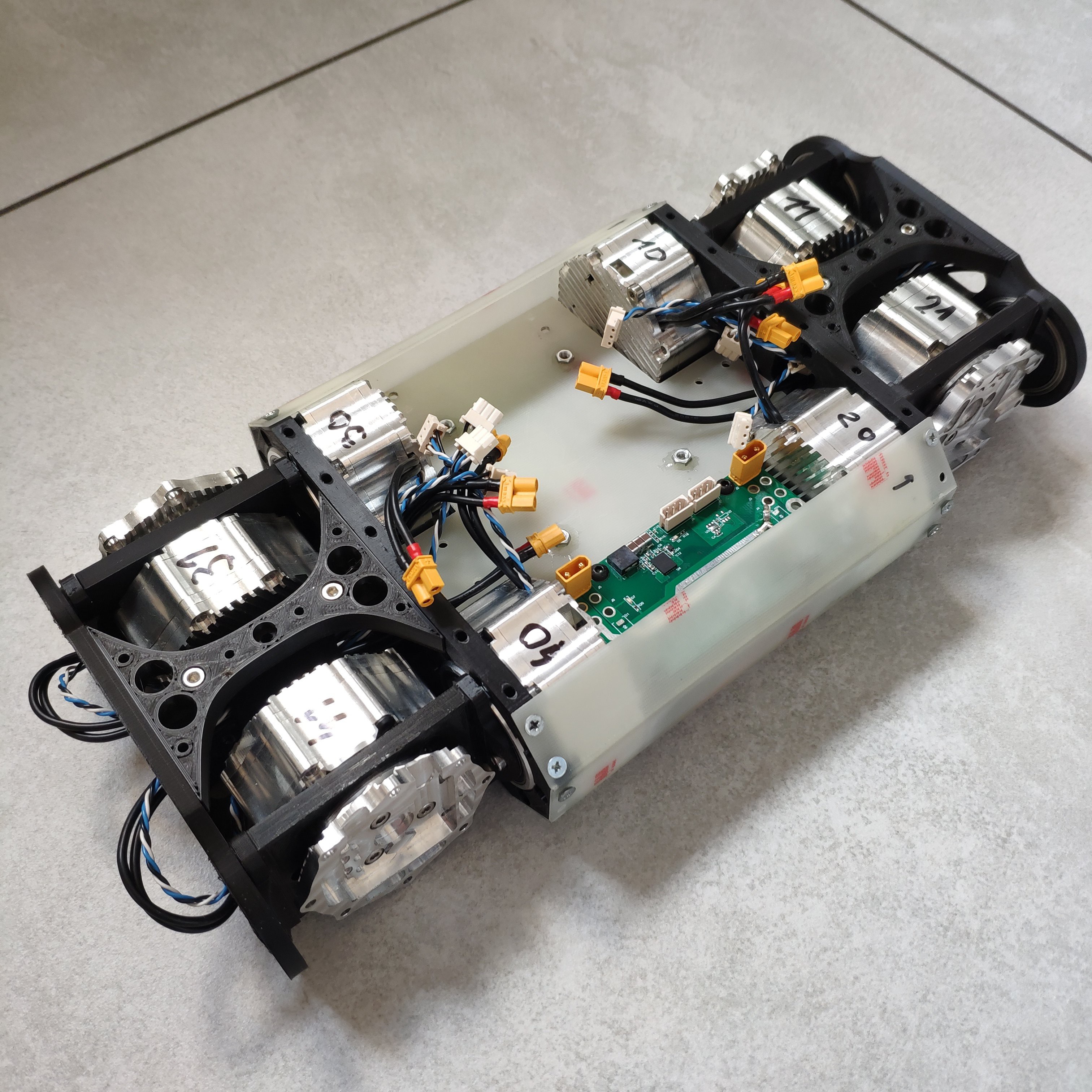
- Hip actuators mounted to the 3D printed frame:
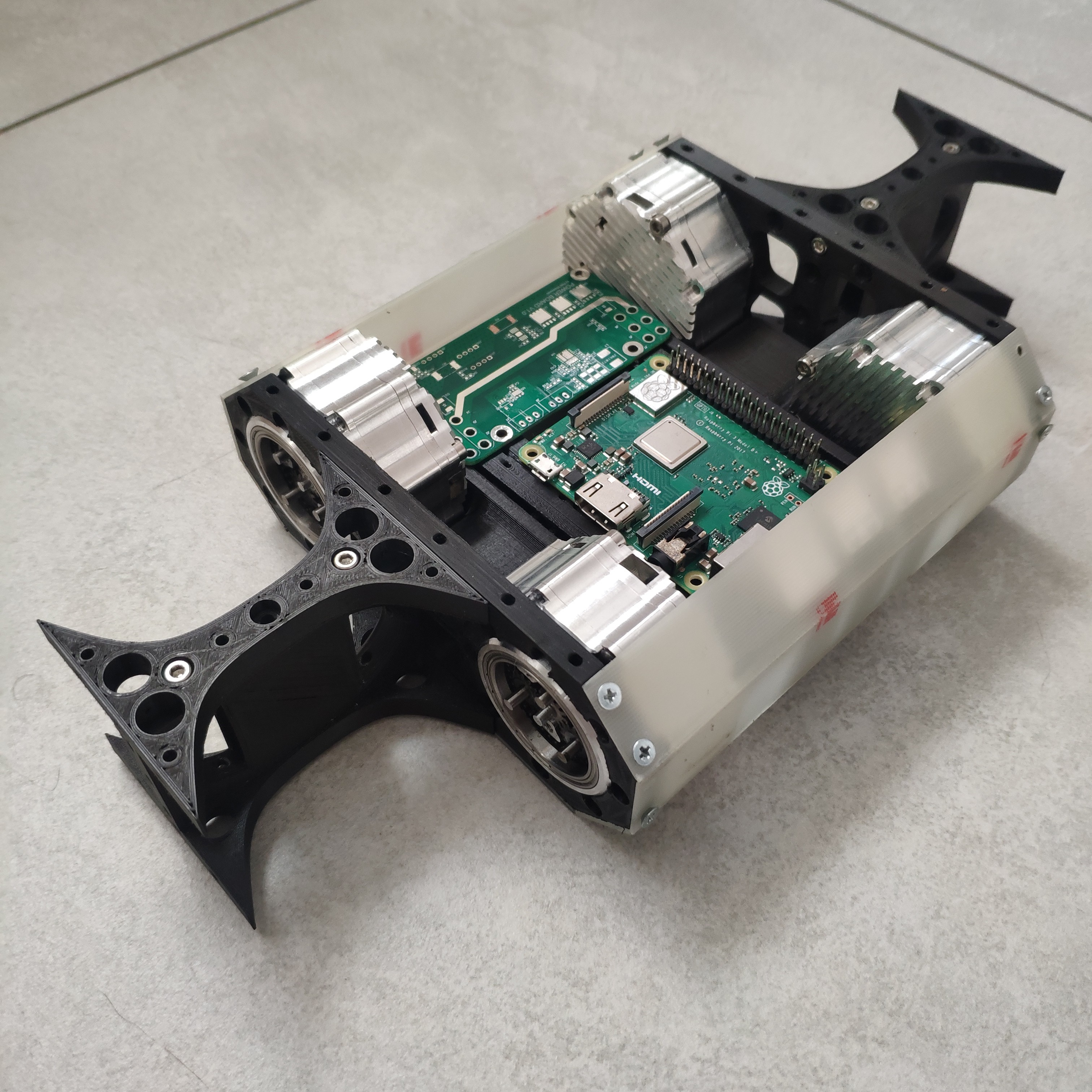
- Thigh actuators mounted to the hip actuators and cables routed to the inside of the torso:
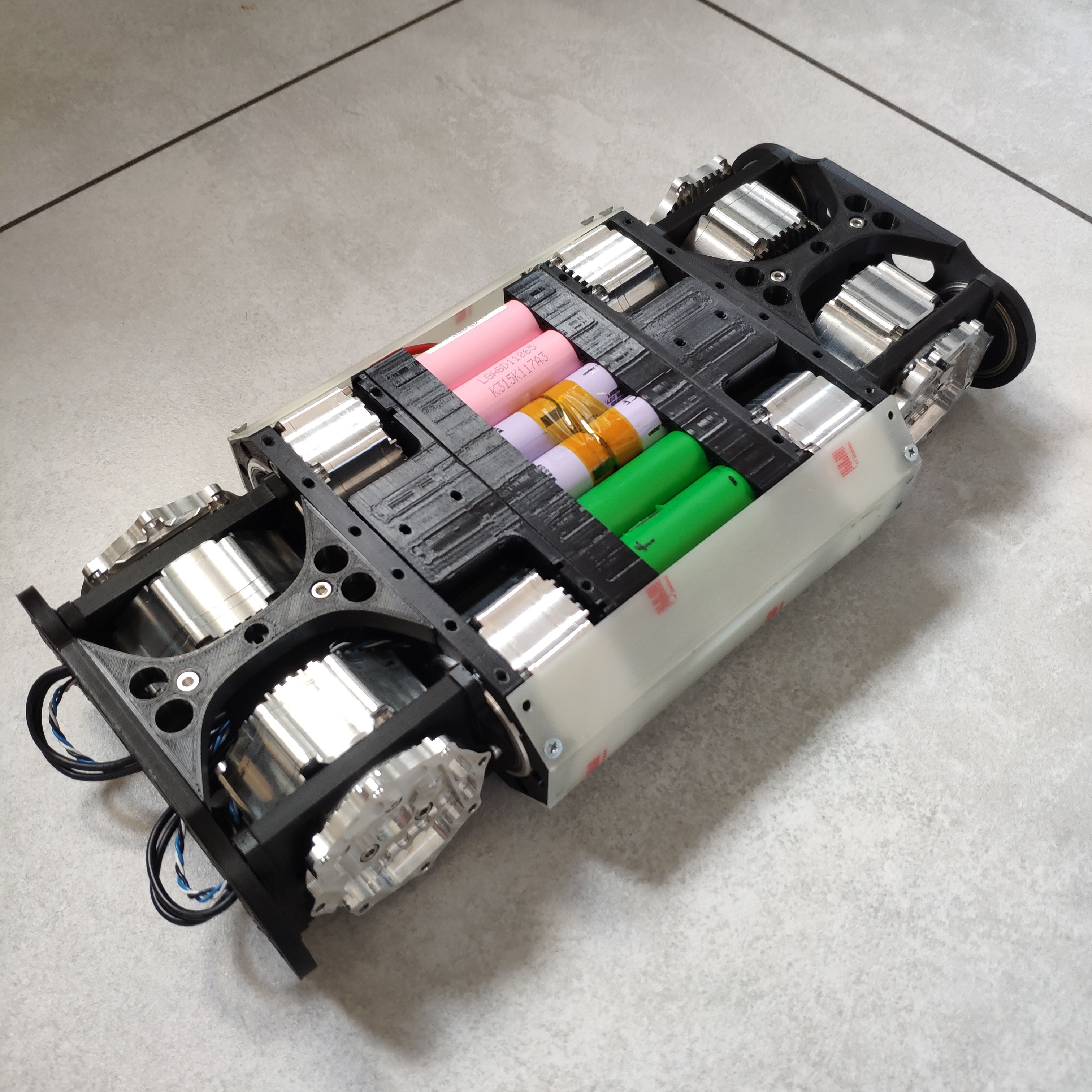
- Battery inserted from the bottom side:
- and finally, the tibia actuators mounted to the rest of the assembly:
I also created a short demo of the body kinematics using a PS3 pad as the controller:
The robot is still powered from a bench PSU and the commands are sent through a USB<>FDCAN, but soon I'll be able to make it completely standalone :) It looks like I should fit in 4 kg of the total mass.
In the end, I want to mention the presentation about Wolfie which I gave during the Reddit r/Robotics Showcase. The whole event was recorded so feel free to check that out (my presentation starts at 01:04:30):
https://www.youtube.com/watch?v=HLFfAnheun8&t=137s&ab_channel=theredditroboticsshowcase
A more detailed description of the assembly is available on my blog: https://pwwprojects.blogspot.com/
Stay tuned for more updates!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.