 Gradivis
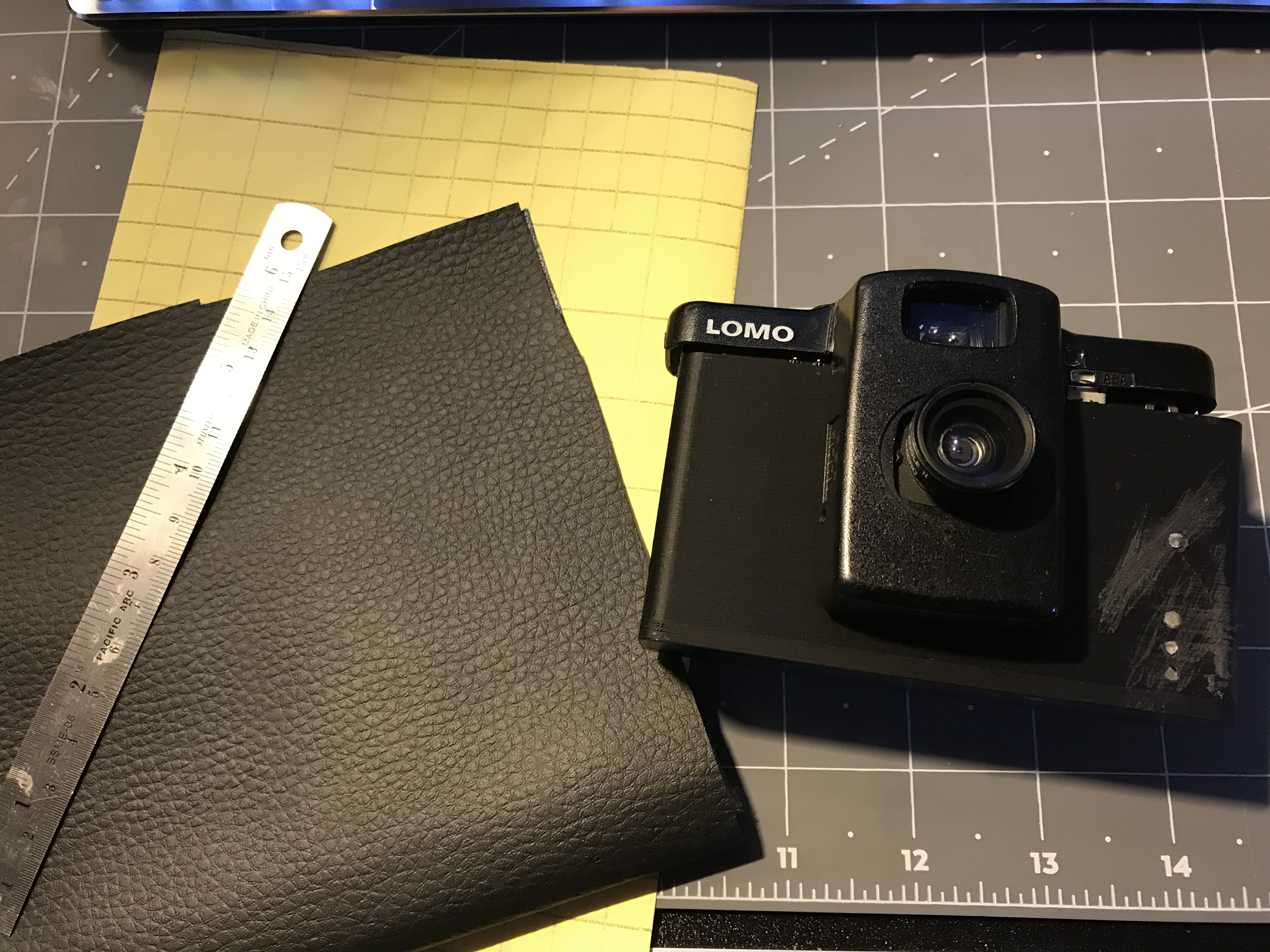
GradivisI shot my first roll on film in the year 2000, and have been in love with it ever since. I still shoot film regularly along with digital, but other than my Fujifilm X series have never really had a FUN digital camera to play with. I miss shooting from the hip with a straight forward camera. One without all the bells and whistles that I find often distract from simply making art, and not some overpriced hipster sh*t sold at UO that automatically syncs with your Instagram to make sure those artificial little pumps of your daily social dopamine don't cease. Just press a button, take a picture - MAYBE twist a dial but not more. What better enclosure than the no-nonsense, almost brutalist LOMO cameras for such a project?
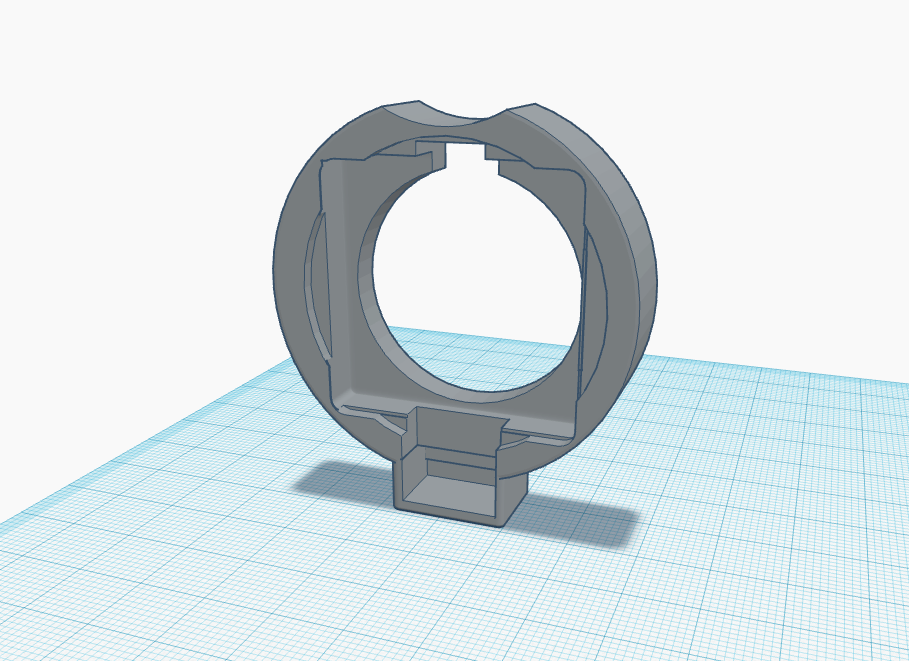
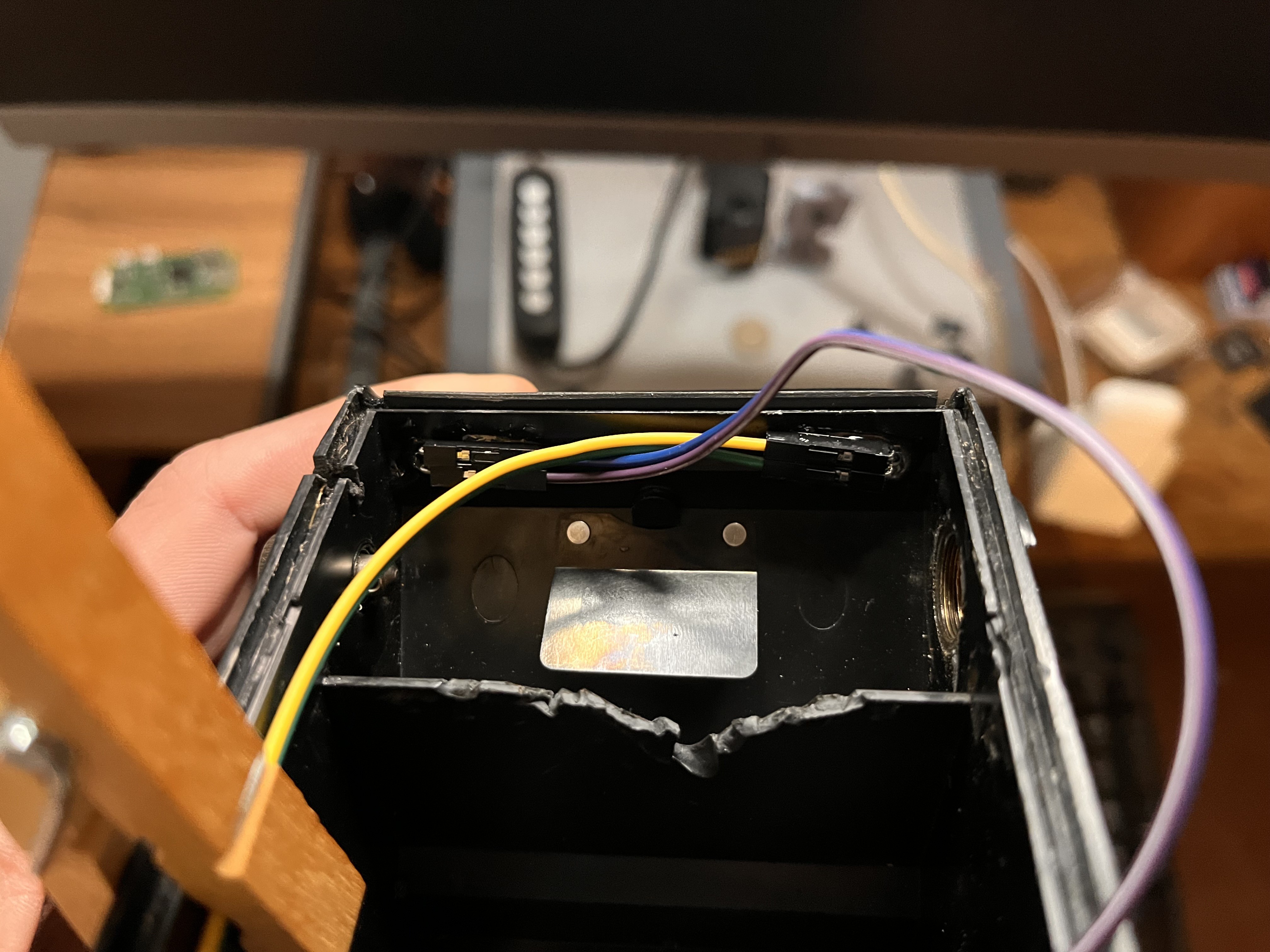
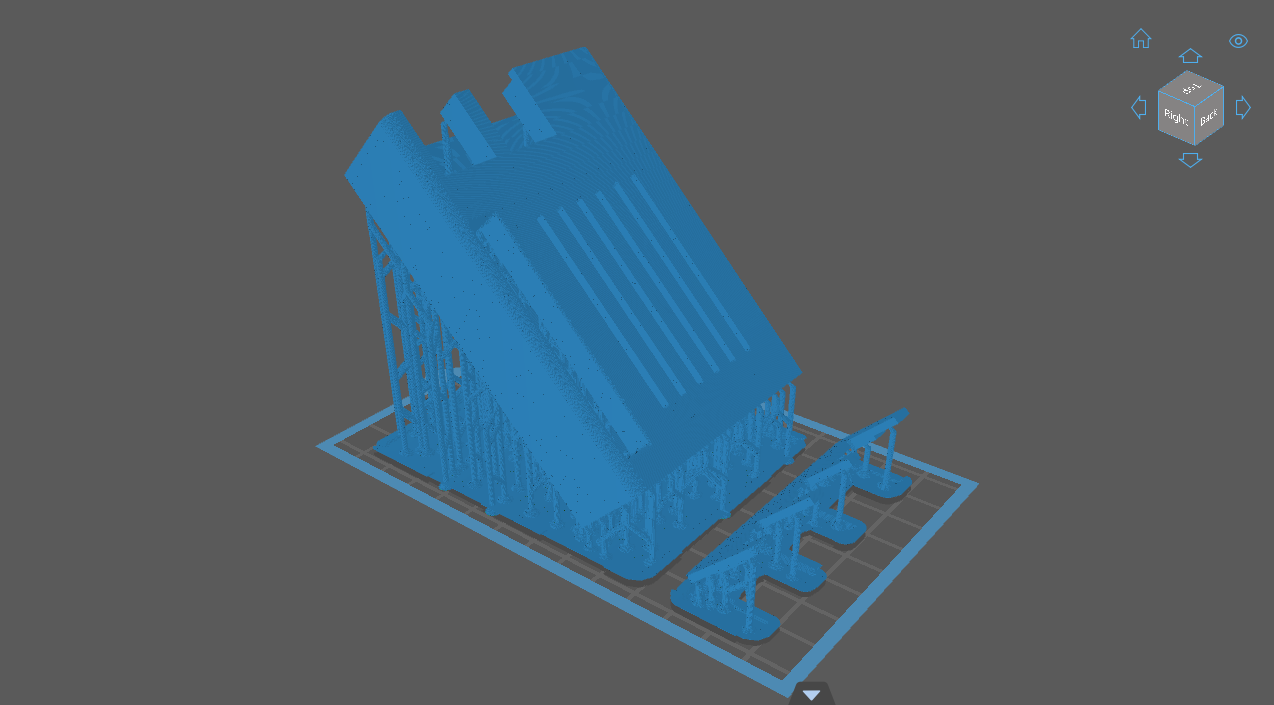
So with almost zero 3D modelling experience, only one successful RPi project under my belt, and a collection of skills learnt only from reading books and raw experience...I set out to make the LOMOPI.





















 Jacob David C Cunningham
Jacob David C Cunningham
 The_Mekon
The_Mekon

Short burst of photos saved to mp4 could be fun