0%
0%
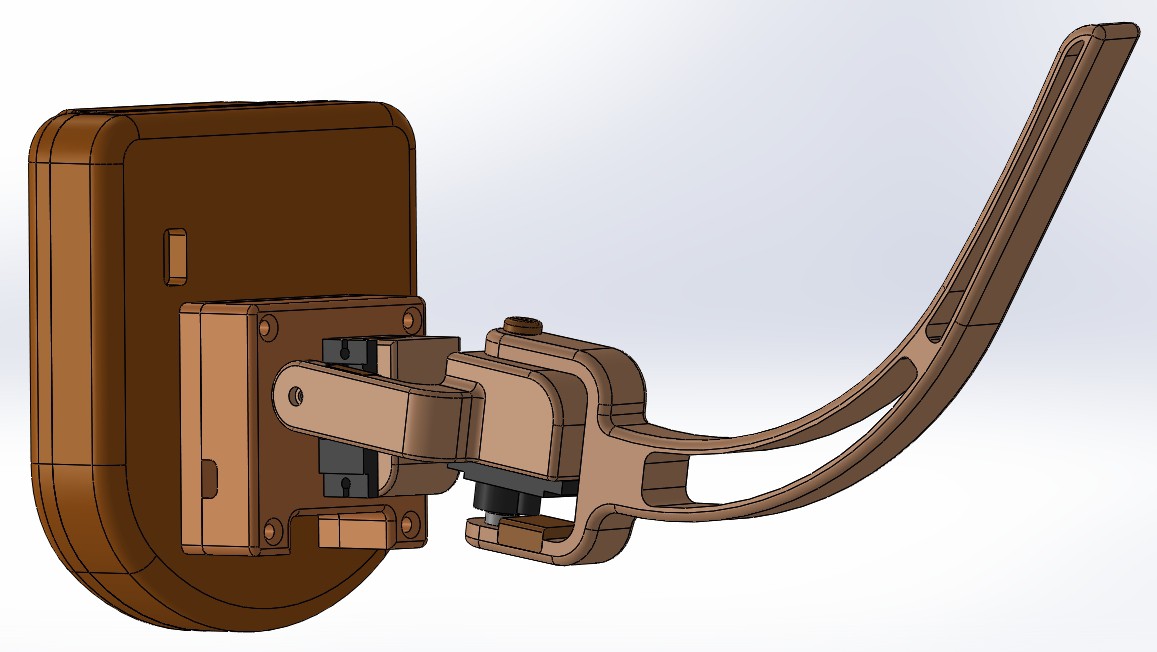
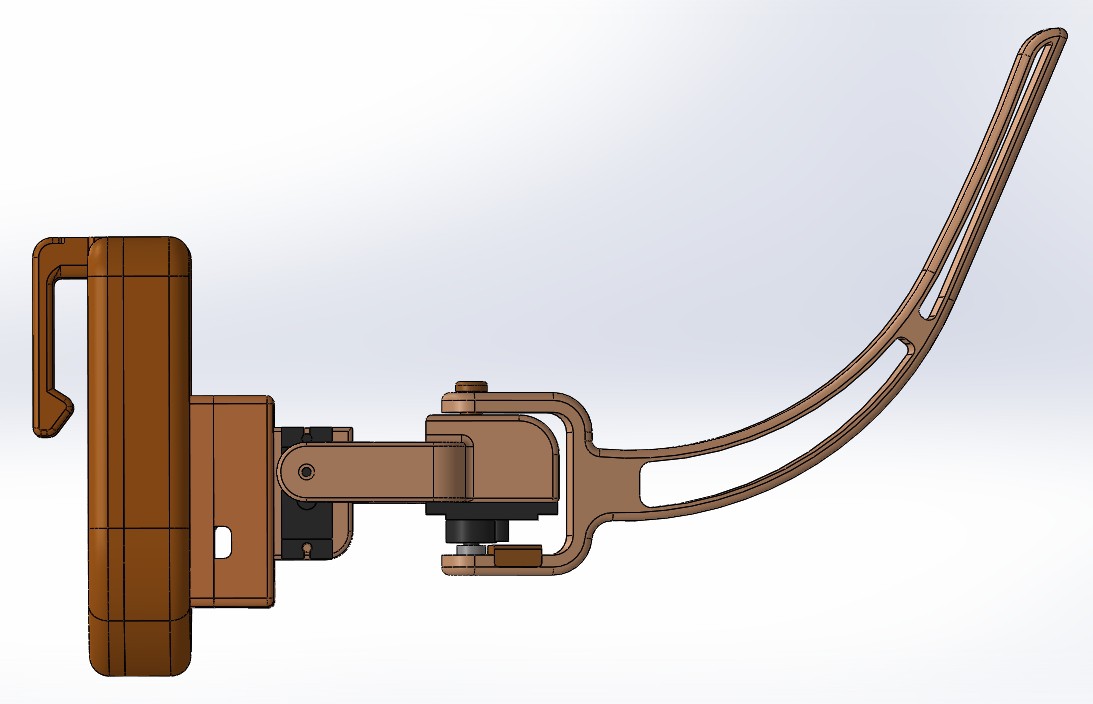
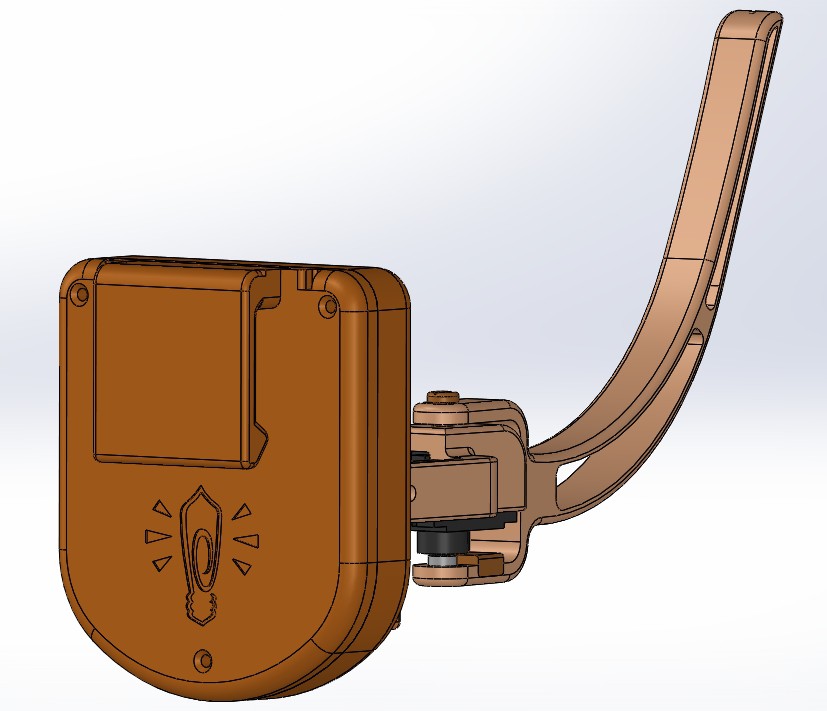
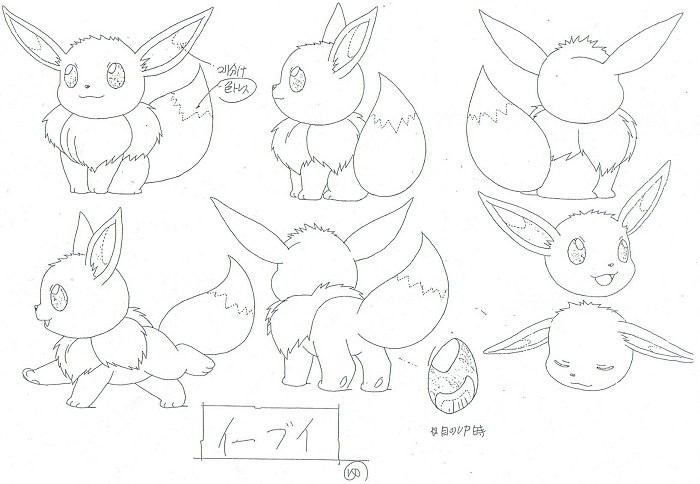
Animatronic Eevee Tail
A wearable to complement an Eevee Gijinka cosplay
 Julio Vazquez
Julio VazquezBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 Kevin Cheng
Kevin Cheng
 Brian M. Sweis
Brian M. Sweis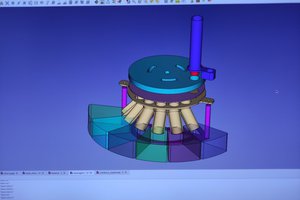
 Sergei V. Bogdanov
Sergei V. Bogdanov
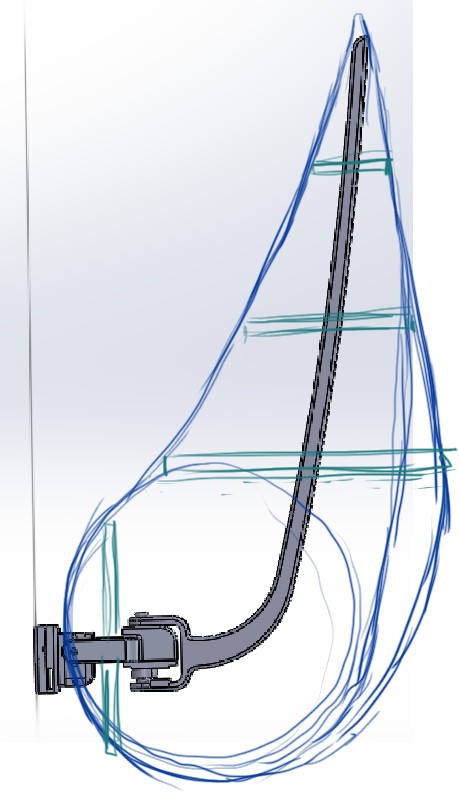
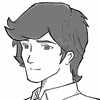
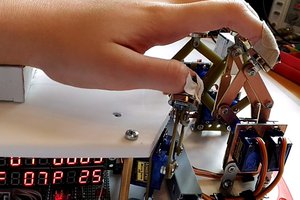
I've three photos of a tail done for a similar sort of costume, that worked a bit like the 'tentacle' mechanism Hackaday did a blog post series on -- basically, there were two servos that each worked a pair of cables. One cable let out as the other pulled in. According to the original owner and builder (not me), because it was done some years ago with not-modern batteries and not-modern servos, it was kind of clumsy and didn't work very well or for very long. That said, it /did/ work.
I'm afraid that that's all I know. The builder/owner has since disassembled and/or discarded the mechanism, and since English was not his first language, there was a bit of a barrier to getting the full details.
That said, if you're at all interested in those photos, let me know and I'll get them to you somehow.