 Owen Trueblood
Owen TruebloodAs I was trying to organize the thinking and interpretations of the research I had been doing for many months I found a satisfying way to divide it all into four perspectives:
- Space
- Map
- Individual
- Society
I wanted to find a simple list of elements that captured the whole space of thinking on the origins and development of life. Some of the research I was reading was talking about life in terms of bare information theory, which was very abstract and challenging to tie to everyday lived experience. Some of it was talking about how humans and other intelligent animals learn, while presupposing those endpoints of evolution. Other research concerned consciousness, which is a phenomena built around and within an individual's experience. And the last category of research concerned the complex and emergent patterns that form when many individuals are gathered together in one system - a society or ecosystem.
Attempting to distill those categories of research I ended up with the list above. The space concerns the area where all of this activity is occurring. It is the Universe, or maybe an abstract mathematical model. It has rules and the information that they govern. The map is any model made by an agent of the space from within it. It might be as simple as the bit string mentioned in relation to the bit guessers from a previous post, or it might be as complex (and more) as the mental model a human uses to navigate the world. One big idea that I feel like I'm orbiting is that map-making is fundamental to the process of life and possibly the two processes can be concretely related via information theory. But I don't have anything concrete to say about that yet. The "individual" is concerned with consciousness. It's a wrapper for the questions about the meaning behind the lives of individual agents and how they relate to the world that they are building their maps for. I'm fascinated by an interpretation of consciousness as a storytelling process, synthesizing disparate information sources which may not be in sync into a coherent narrative. In a way the role of consciousness is to take the map and set out on adventures which generate experiences that are encoded back into the map. Finally, society is a combination of many individual agents interacting. For all these terms I interpret the definitions very broadly. "Society" might include abstract systems with very simple agents, or apply in the usual sense to human societies and phenomena like economies and governments. At the societal level there are the questions around how to define objects. Where do we define the edges? Why are there distinctions between individuals and society? Is the society in a sense another individual? Are there individuals and societies at every level of complexity? Etc.
With that context we can get to the tangential experiments that are the real subject of this post. I looked at each of the 4 categories listed above and did some experiments related to them. For the individual I was stumped for a little while because I did not see a satisfying way to reach at consciousness from the technical/abstract simulations I had been playing with. I was staring around at stuff in my studio and saw a bin of sensors and that's when I finally saw a way to express something about my preferred interpretation of consciousness as a storyteller.
I found a simple lidar sensor which takes distance measurements as it spins in a circle. If the measurements are recorded then a 2D map can be created from the data. If the sensor is moved the map can be extended into 3D. What I did was take the sensor and tape it to a stick and then plug it into my laptop and shove my laptop into my backpack. I wrote a little bit of code to record the data points and later little bits of code to visualize it. At various points I took the lidar-on-a-stick and walked around Brooklyn collecting data sets.

I was surprised how satisfying this simple setup was to play with. I wasn't collecting the path that the sensor was moving through space so when visualizing the data I just pretended the data was collected while the sensor was moved in a straight line. As a result any motions I made while collecting the data that were not along a straight line had a very large impact on the final 3D map.
I did some starting experiments in the building where I work. You can see two staircases, small bits of the tall sloping ceilings, interior windows, and doors.
I took it outside and walked around an entire building next:
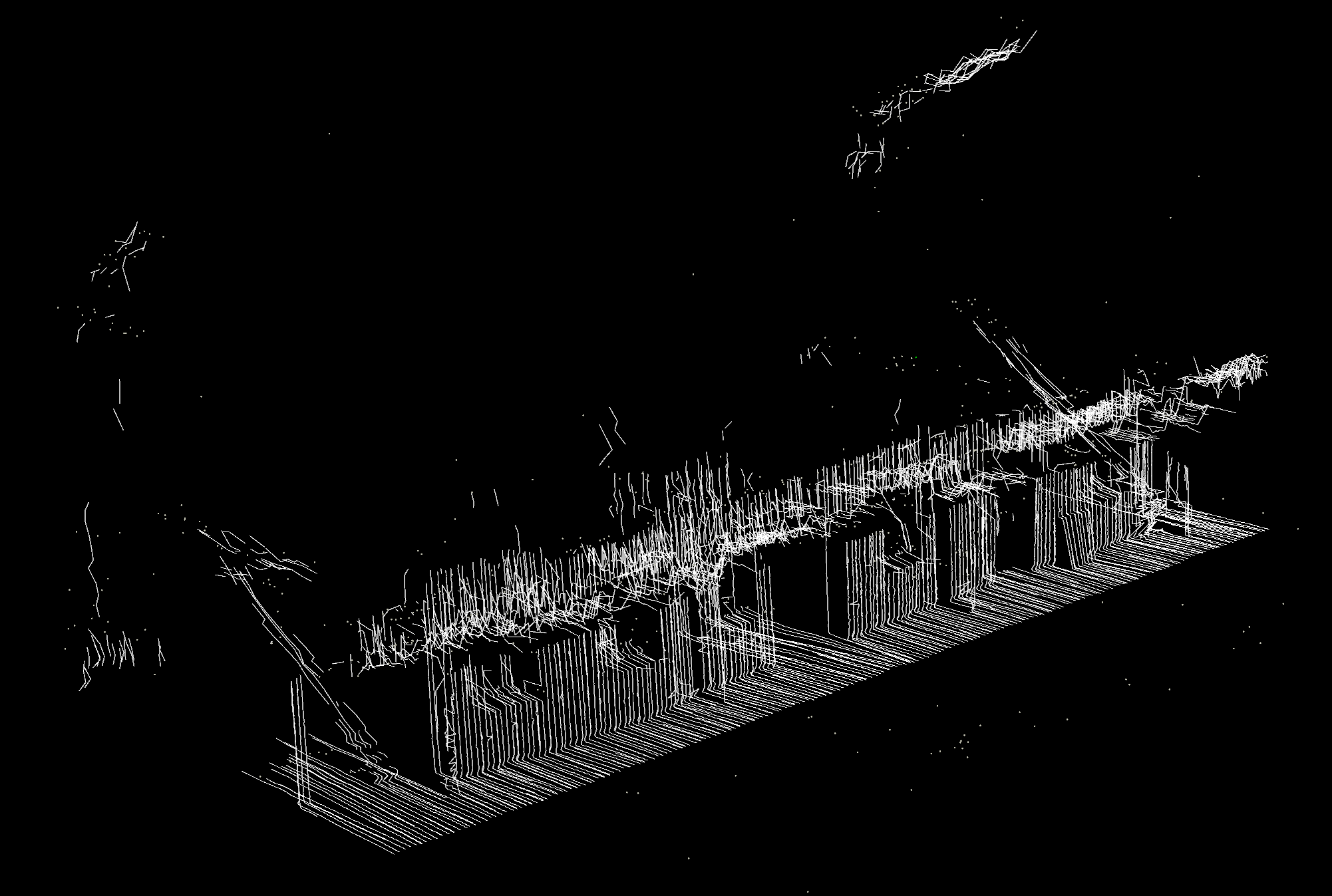
This was back when there was snow on the ground. You can see the path someone shoveled in the snow where I am walking. Even though the path winds around obstacles it mostly stays in a perfectly straight line because of the data interpretation. You can tell where I deviated from a straight line in real life because of the overhead pipes to my upper left which in reality follow their own straight path but which were very perturbed in a few places when I had to deviate to follow the path in the snow.
One fun experiment I did was to take the sensor outside during a heavy snowstorm and just hold it still while recording data.
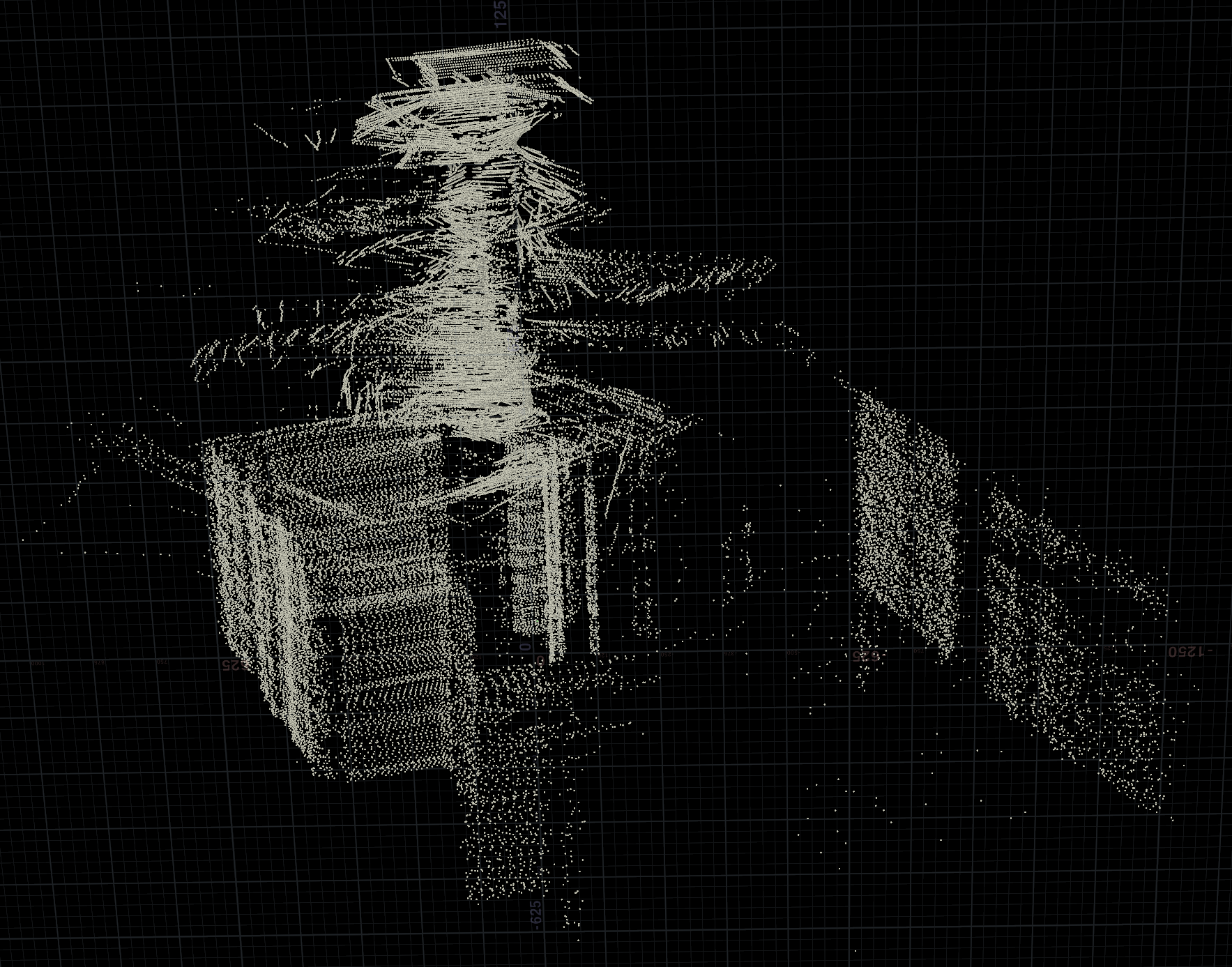
I was hoping I would pick up snowflakes falling but there was very little of that. Mostly I captured the walls of the buildings next door and then the chaotic interior of a hallway as I walked back inside without taking care to hold the sensor still.
I enjoy that the final form has a coherent underlying reality but is unrecognizable because it's missing a simple piece of information (the path). I see a connection to consciousness in that the process can synthesize data from our senses into a story that is linear in time and which is coherent to us, but may only roughly resemble the internal story of others. If I took the sensor and walked through the same space along two different paths the resulting 3D maps would look very different even though the underlying reality being sensed is identical. It highlights the important of a robust map-making process which is able to extract the invariants out of the incoming sensory data.
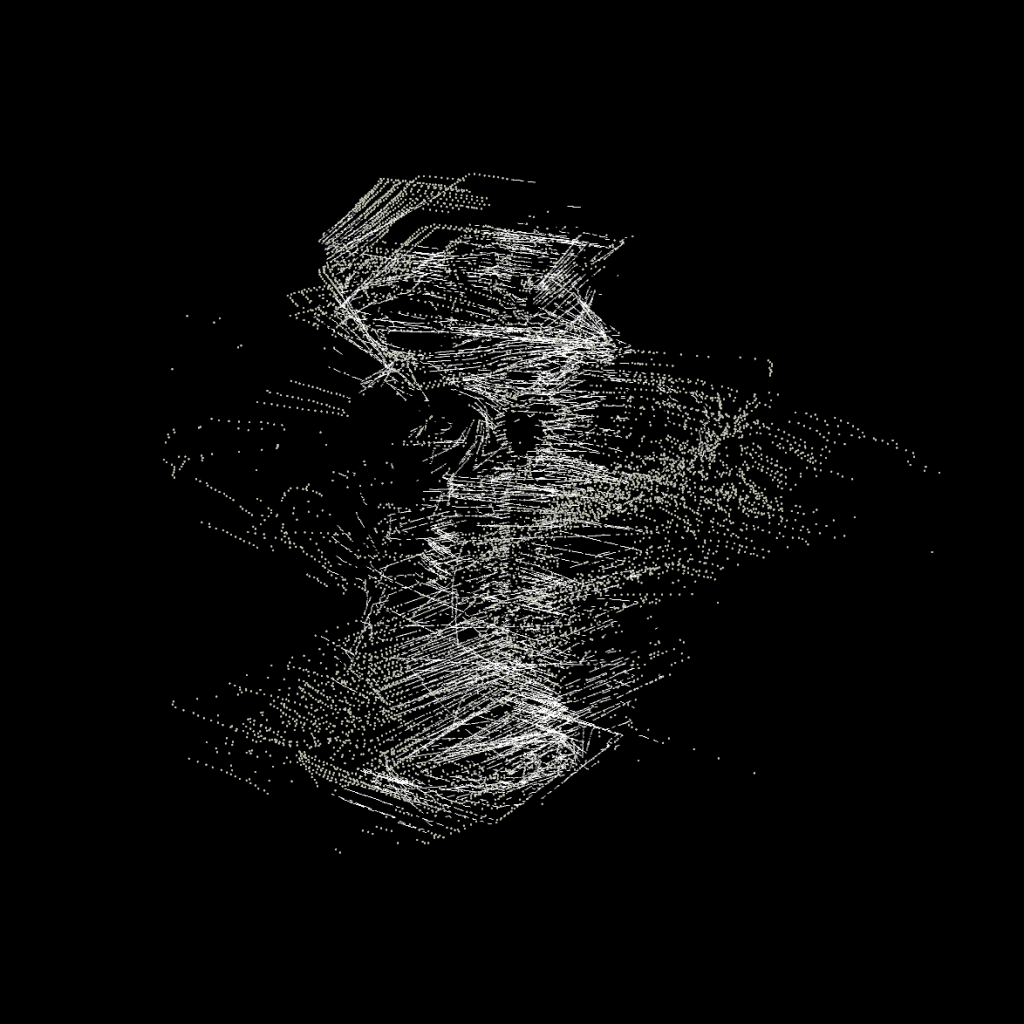
The last experiment that I did was to carefully walk down a snowy street near my apartment during the snowstorm:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.