 lion mclionhead
lion mclionhead

Sharpied the final designs on. PLA+ is shinier than PLA, making it look slightly more upscale, but PLA+ is expensive so the lion kingdom didn't order any more after the container.
Sadly, the latest retaining ring popped right off. 1 problem is it can't be inserted bed side up, so it has a bevel which just slides off. After a moment of grief & debating destructive shaft modifications, the decision was made to spend $25 on a set of steel retaining rings & a retaining ring tool. It was as much as a new motor.





This tool doesn't fit anything smaller than M6. M6 requires the aid of a metal rod to separate the ring.
The era of 3D printed retaining rings had come to a close, after 6 months. The problem with modifying the shaft for another PLA structure was how a more robust PLA retaining ring would slide on. It would entail removing the encoder & then removing the pin, instead of just removing the encoder. Getting the right tool for the job was the only way.

Stashed a repair kit in the battery compartment while waiting for the snail mail shipment of retaining rings. This can unbolt a wheel & either reseat or remove an o-ring. Lions haven't had any luck reseating an o-ring in the field, but a sharp screwdriver can cut through TPU. The battery compartment has enough room for contraband, but if screwdrivers aren't pointing forward, they'll get trapped.
In servo land, the SPT died the same way the Hextronix died, a sudden full left lockup followed by intermittent restoration after wiggling the cable. Power cycling it did nothing. It's been 7 years of chasing erratic servo behavior. Most of it might be pots & motors wearing out. The last few have been converging on the wiring.
The cable has been already replaced. Replaced it again. This one is coming down to a loose solder ball or dry solder joint. So that's 2 days of not going anywhere because of a retaining ring, dead servo, dead 3D printer.
Pressing down on the board in just the right way got the servo to glitch reproducibly. Only after thoroughly cleaning the PWM trace, the problem finally appeared.
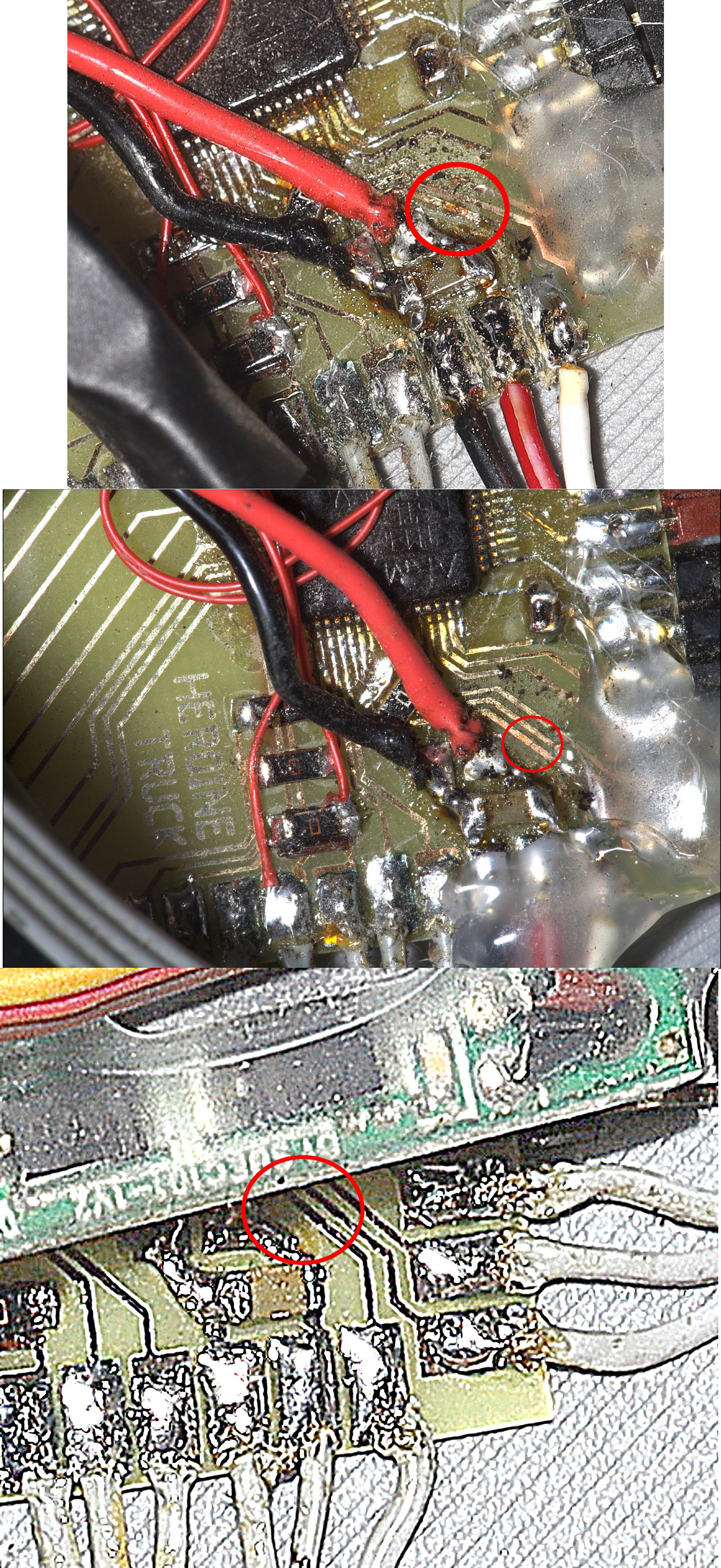
There was a micrometer scale break in the trace, completely invisible when it was dirty. It's believed to have been there since the board was made. The board was made with a dedicated buck converter for the servo. An xacto nicked it while cutting a wire to the buck converter. The oldest photo is too small & dark, but some grotesque unsharping reveals 3 slightly brighter pixels in a row where the break was spotted later.
The break only cost $35 in unnecessary new servos. The previous $150 of servos were bought during the lunchbox days to solve common wear.
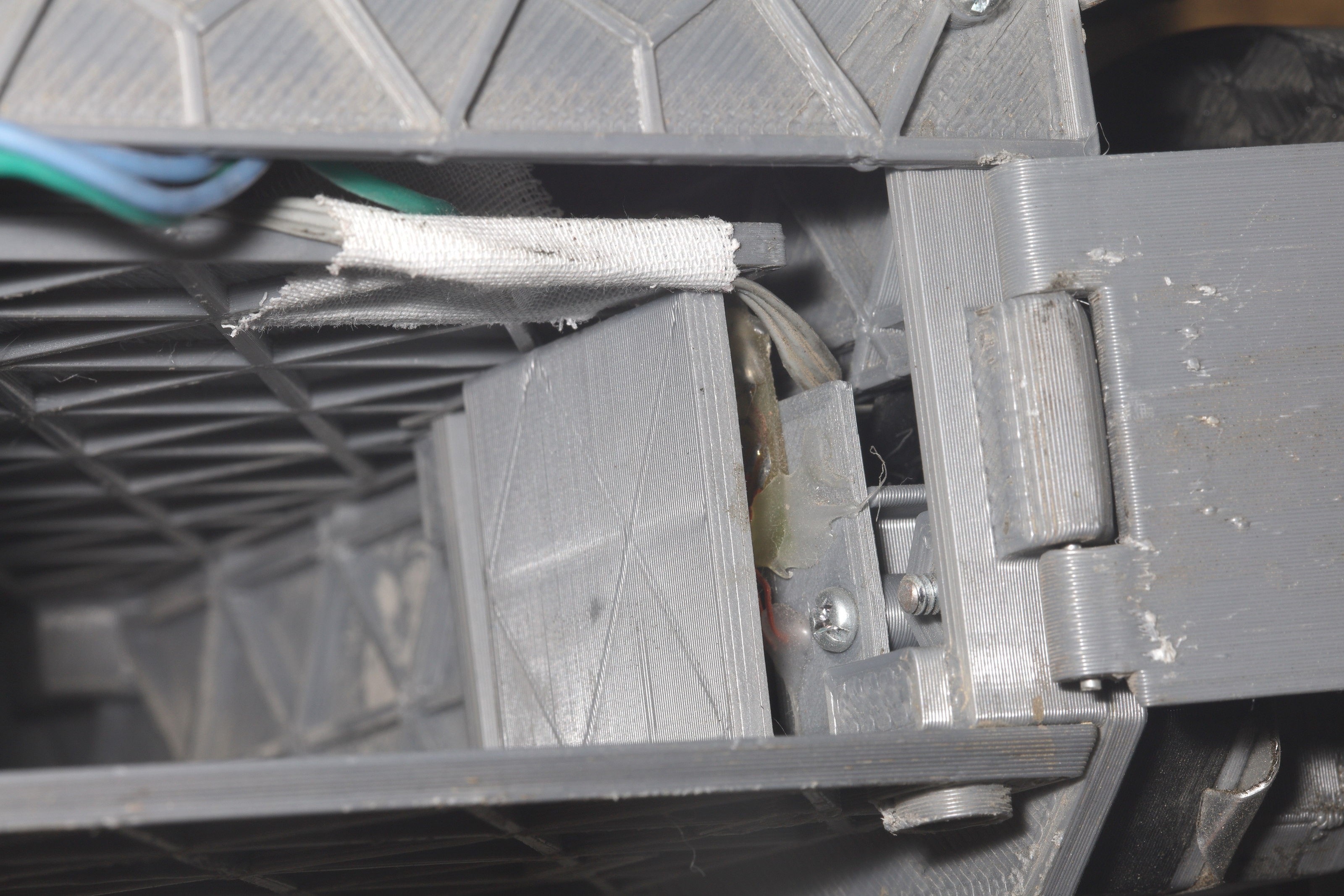
There was another bought of overheating motor. It was blamed on a tangled cable jamming the encoder, but there's no obvious way for it to get in the encoder. The cable was pulled tight, since untangling it would be a full day. Another idea is current in the cable interferes with the hall effect sensors.

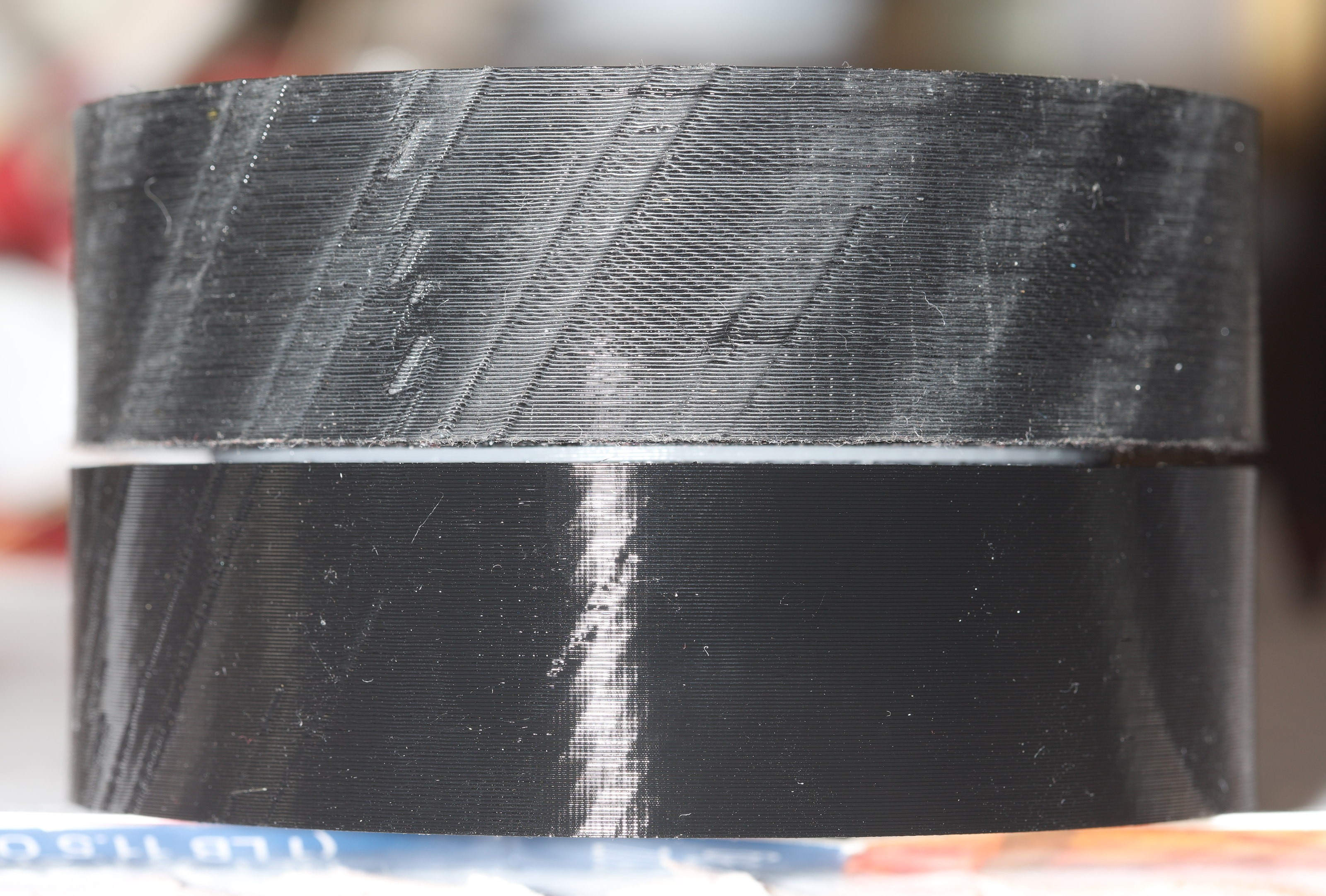
Finally, there was a case of a tire appearing normal, but actually coming out softer than a sponge. The filament became hydrated from a swamp cooler. It was cosmetically indistinguishable from a normal tire until analyzed under a microscope. Something must be done to more reliably dry TPU.
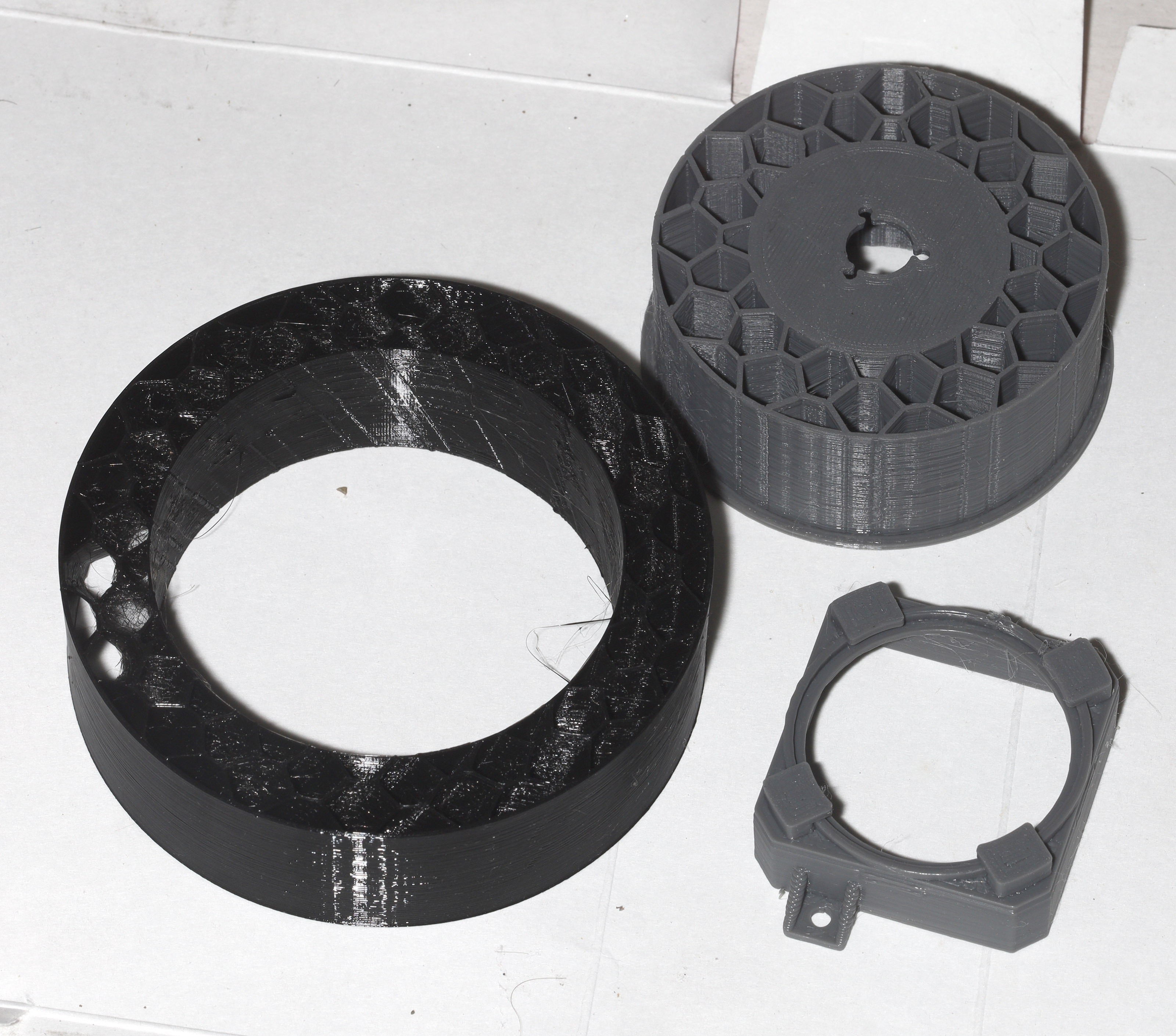
This brings us to the motor module. The use of self tappers as load bearing farsteners is a disaster of biblical proportions. The latest thinking is to use captive 4-40 locknuts & hot glue to farsten the locknuts. The motor module might have to be printed with a .4mm nozzle.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.