 lion mclionhead
lion mclionhead
The last steering failures were narrowed down to duct tape brushing the inside of the wheels. This generated static electricity which intermittently reset the servo, burned out motor controllers, or reset the mane confuser. This discovery was of course aided by rewinding a single motor phase & discovering the motor controller got fried.
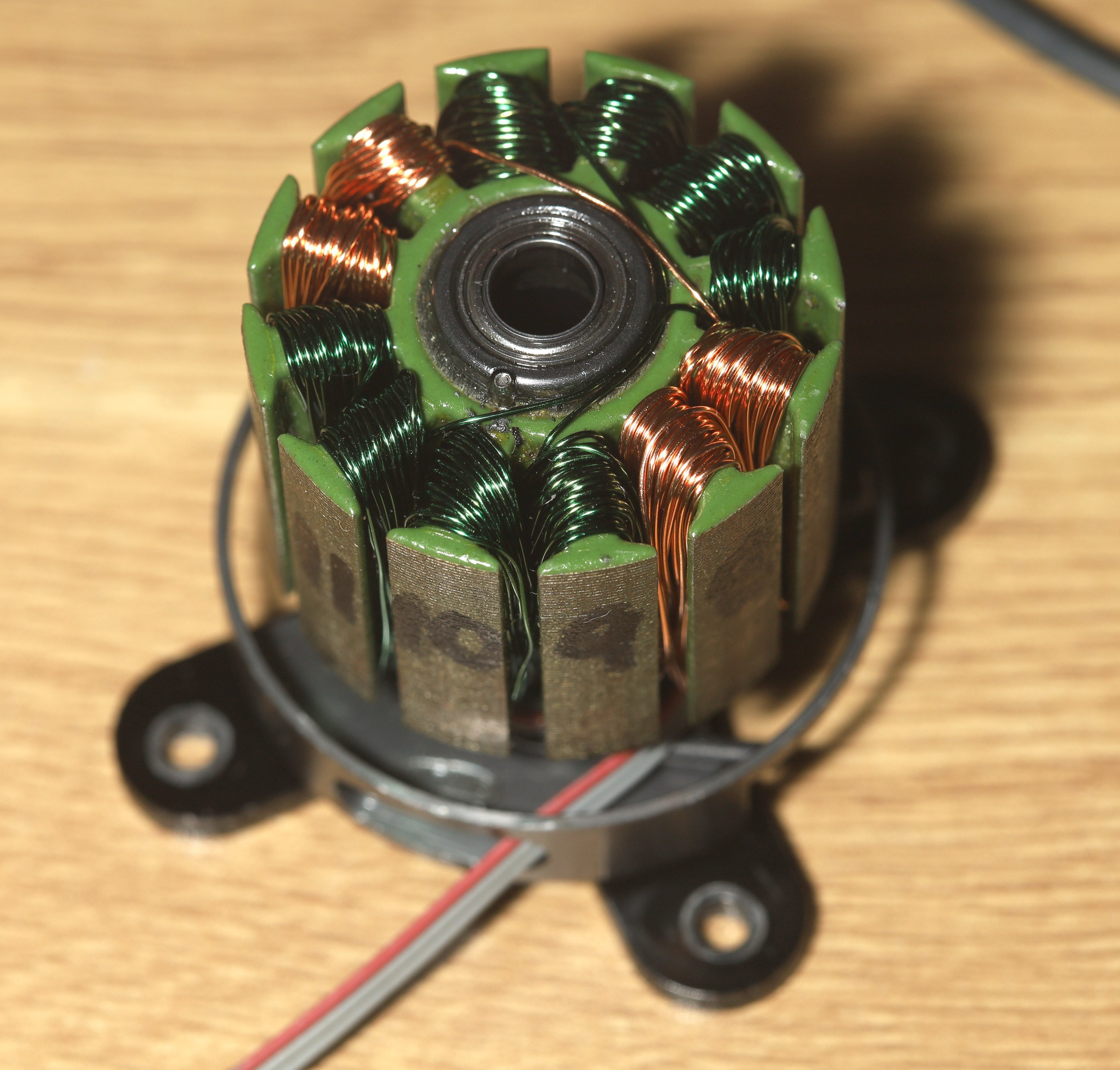
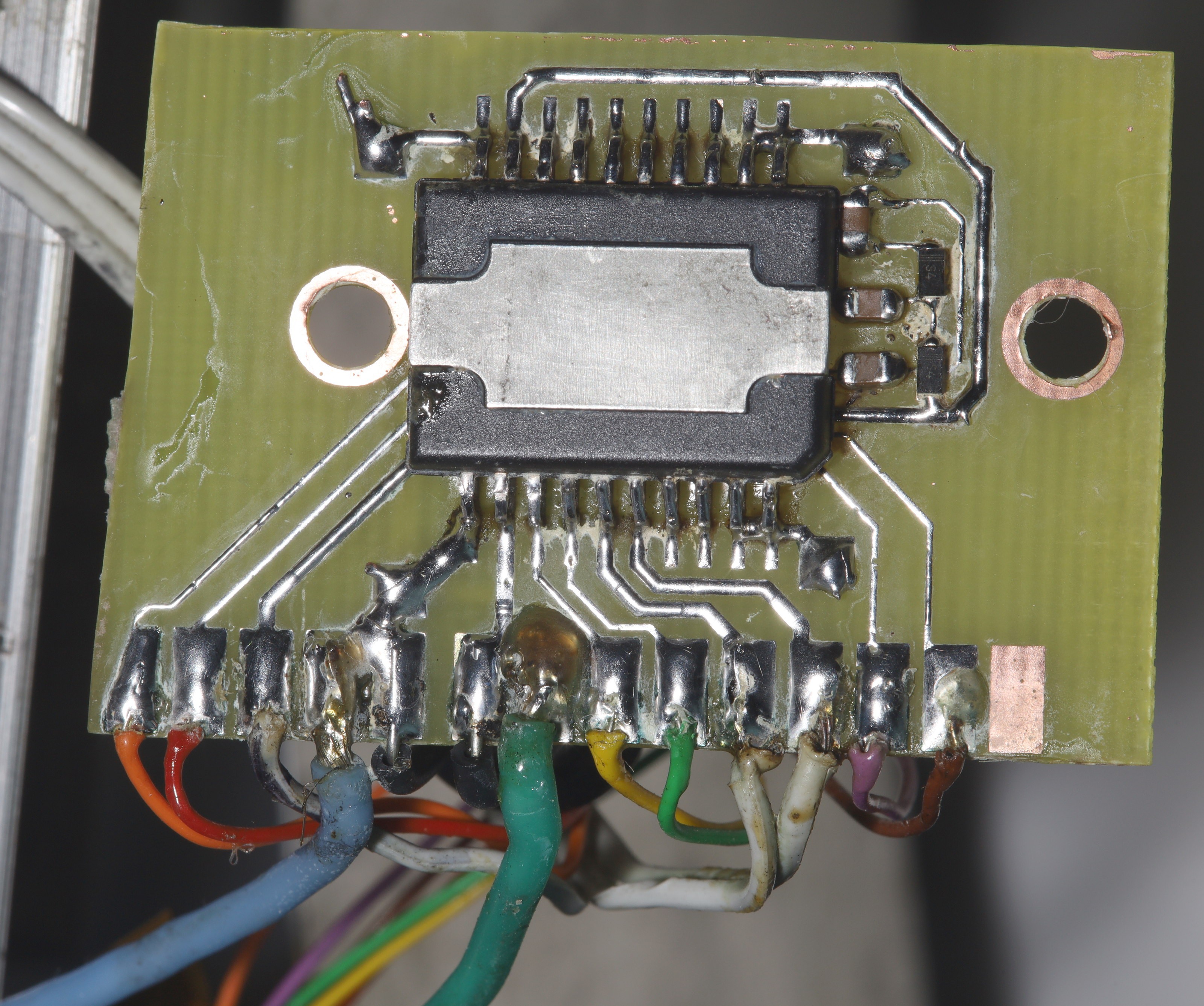
The L6234 is no longer made, so the next replacement is going to require moving the camera motor to PWM from its L6234. It only used an L6234 because the source code was already done. The lion kingdom has always driven 360 deg servos with H bridges instead of PWM because the 1st robots used TTL logic instead of microcontrollers. It was easier to make DC than PWM with those circuits.
Anyways, after that replacement, the lion kingdom got a shock 1 day & realized the truck had a voltage from driving around. The duct tape flaps were supposed to keep dirt out of the motors, but they were also shaped like van de graf generators. Cutting off the flaps ended the servo failures once again. This leaves pushrod wear, servo pot wear, servo motor wear, stick controller water intrusion, broken traces, & static electricity as the causes of steering failure.
The old container was near its end of life, so another was printed.
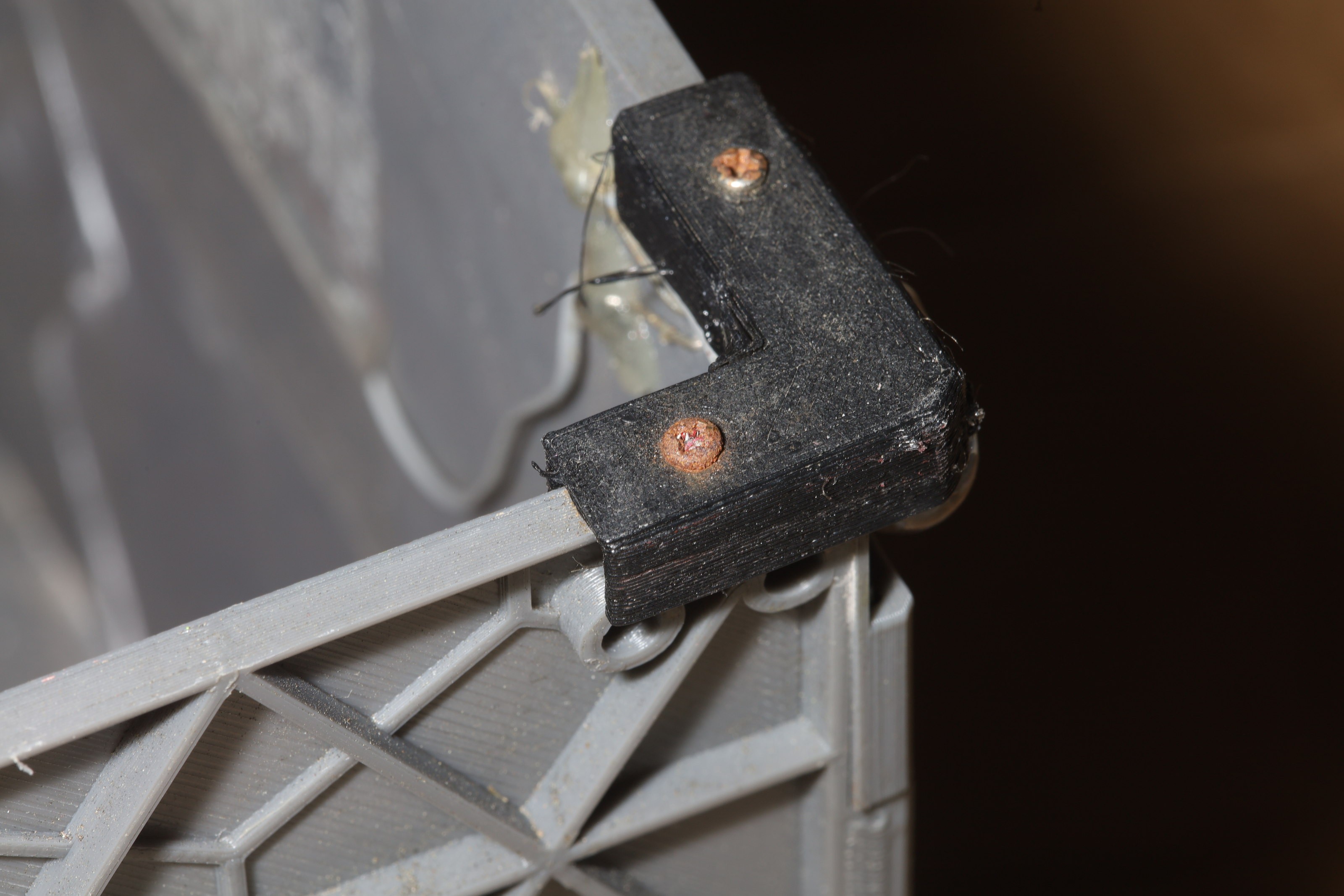
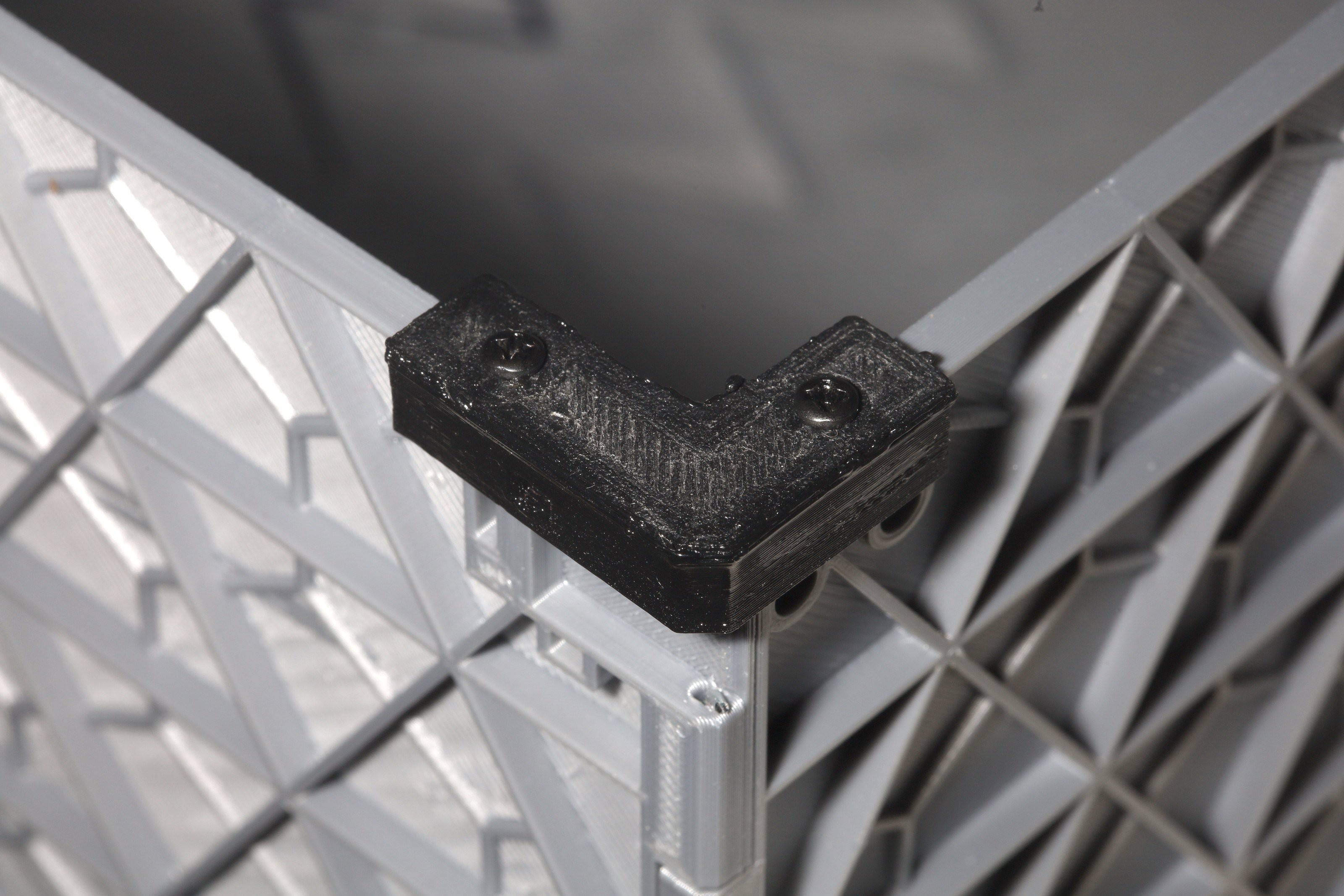



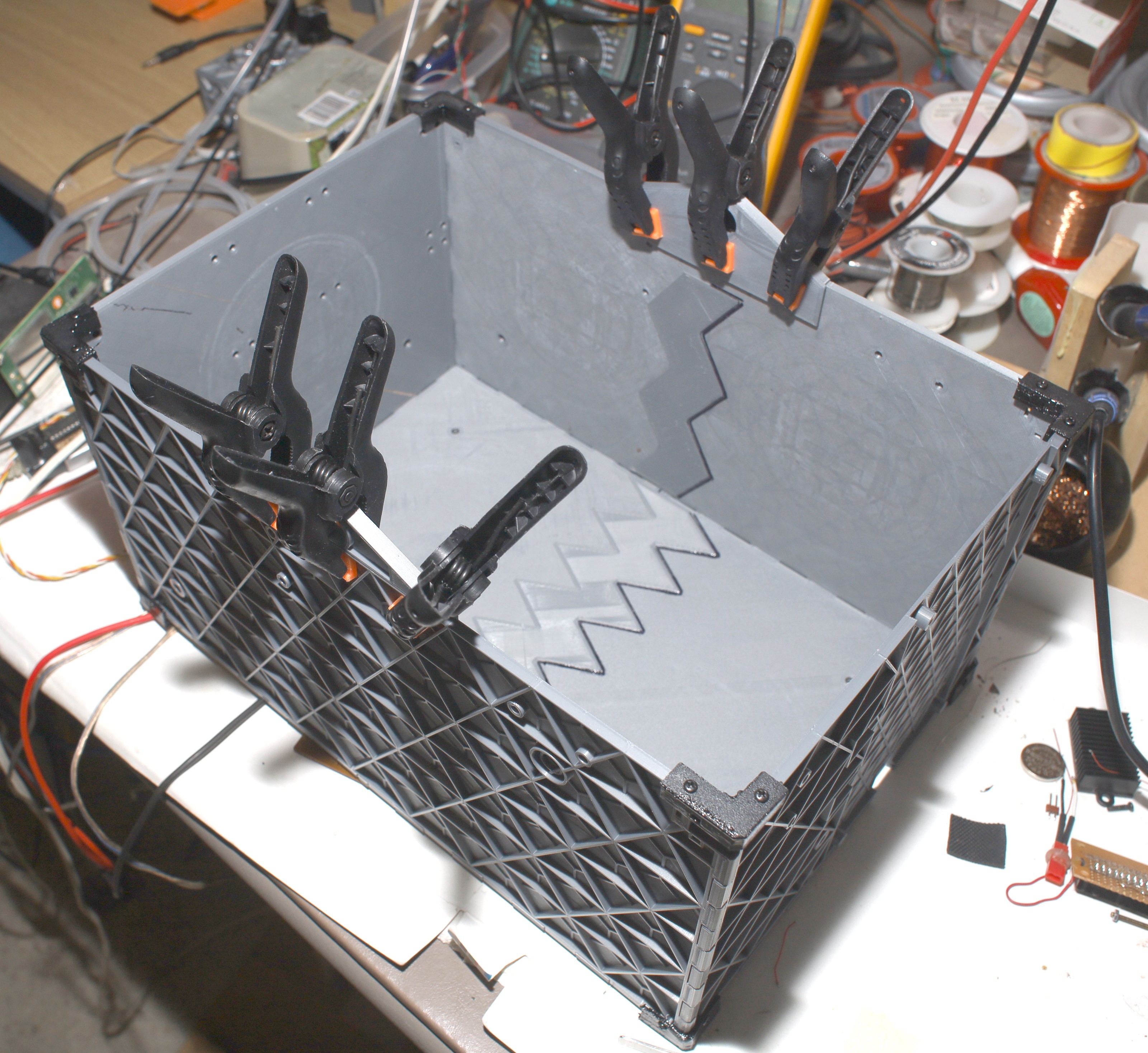

PLA has proven a lot weaker than coroplastic. It's lucky to go 6 months.
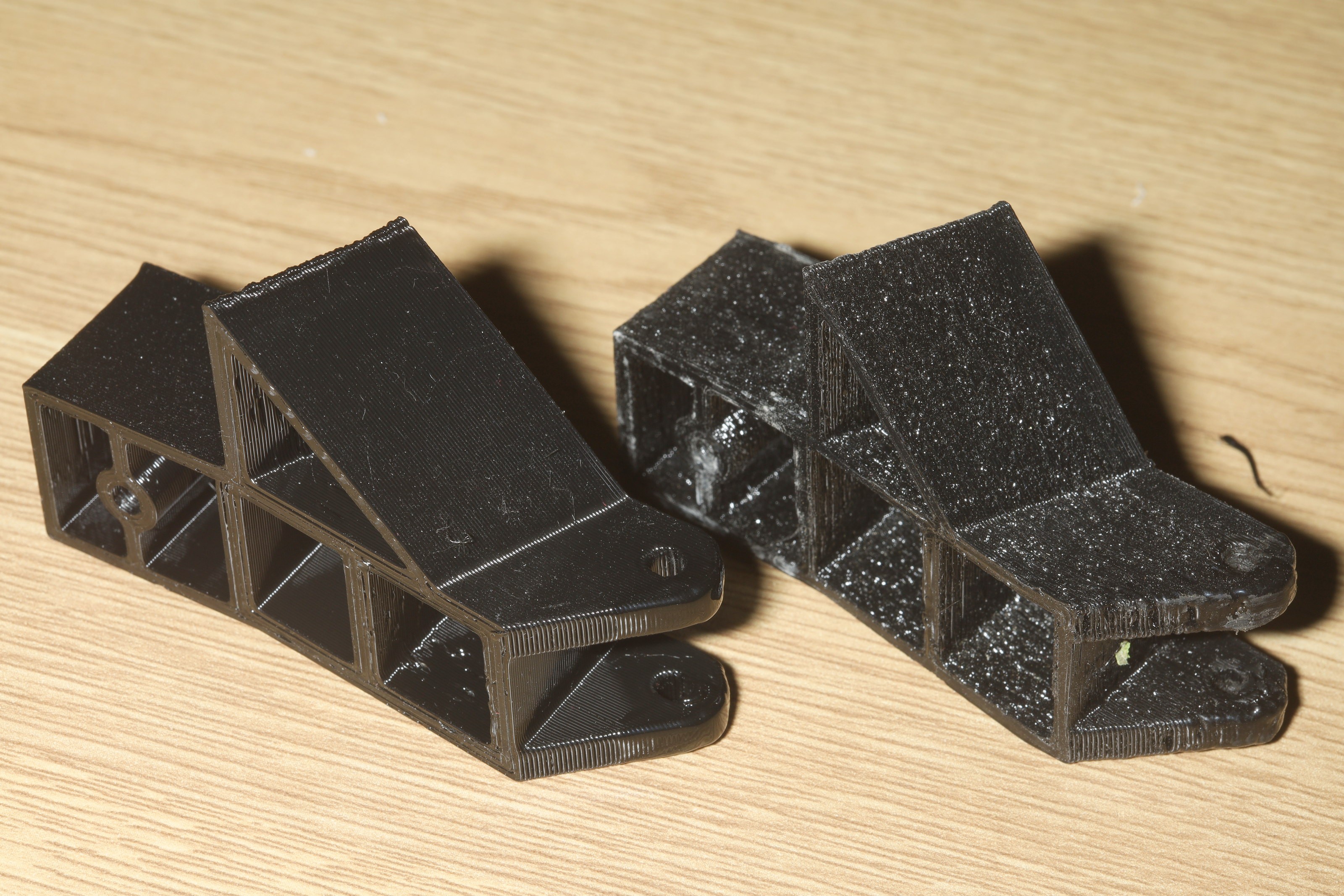
A new wheel fork was printed to try to make it more rigid. Helas most of the flex is on the ends.
Manually drying the controllers before charging them has proven a viable solution to the water intrusion. This is 1 area where a custom charger with longer range than Qi is needed. The charger needs a blower. to dry off the controller.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.