 Mark Howe
Mark Howe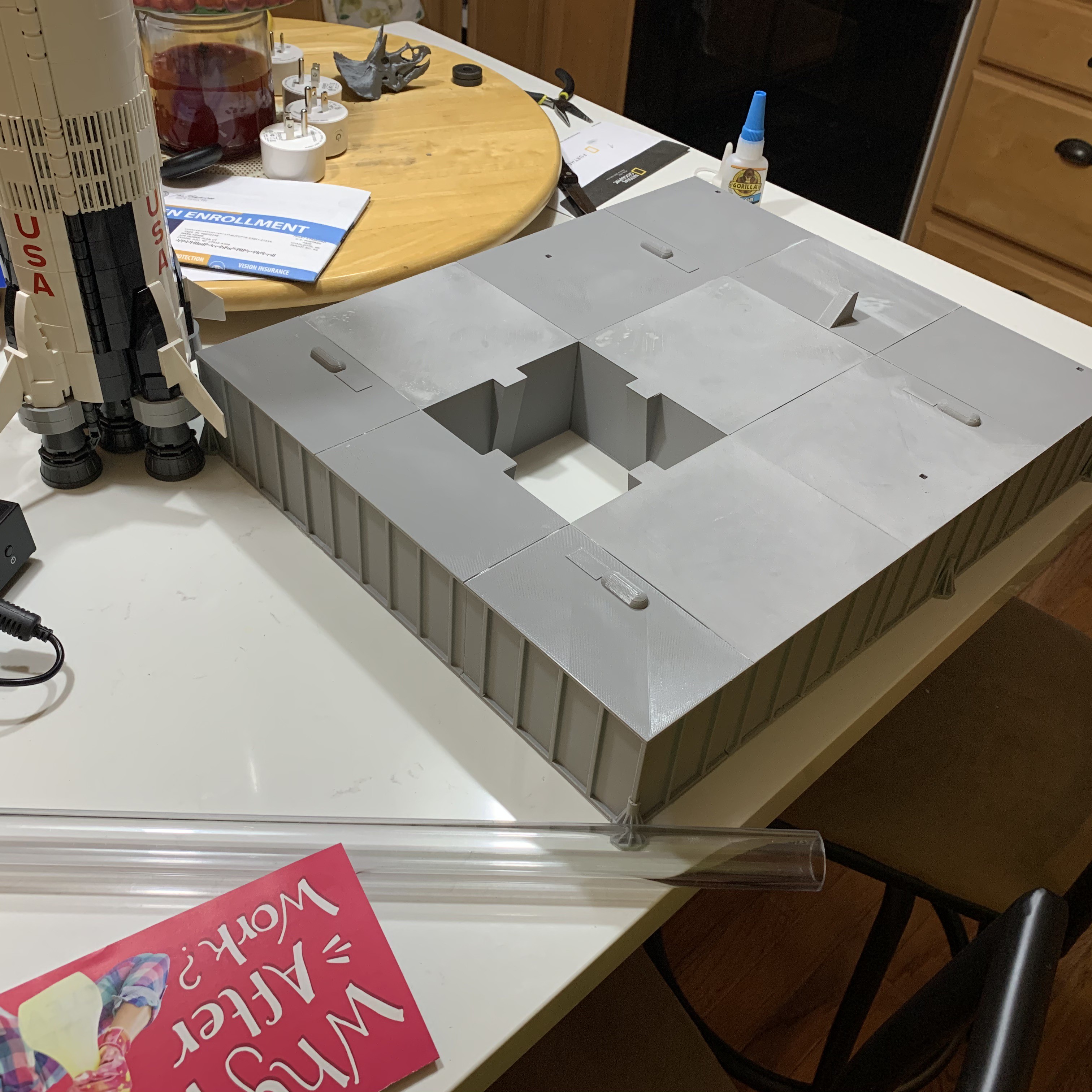
First was printing the base. The Farscape model was scaled by 0.054054 in Fusion 360. Each of the eleven sections was modified to be hollow, without dividers so there would be room to install the lifter, electronics, power supplys, etc . Each section was glued together with extra support at each junction to make everything rigid. Ultimately a little Bondo, some sanding, and a little paint would make the top look like a single piece.

Once the exact size of the pad was known, I built a nice oak stand for holding everything that was going to overflow the base.

Each level was assembed in Fusion to minimize the part count. The floor and elevator is printed in as one piece, as well as the framework. That meant one glue step per floor. Eighteen floors total.

The stairways were a bit of a pain. By some careful assembly in CAD the stairs and some of the railings were printed as a single piece. The remaining rails were modified to self-align making gluing the small parts easier..

Lots of little stairways.
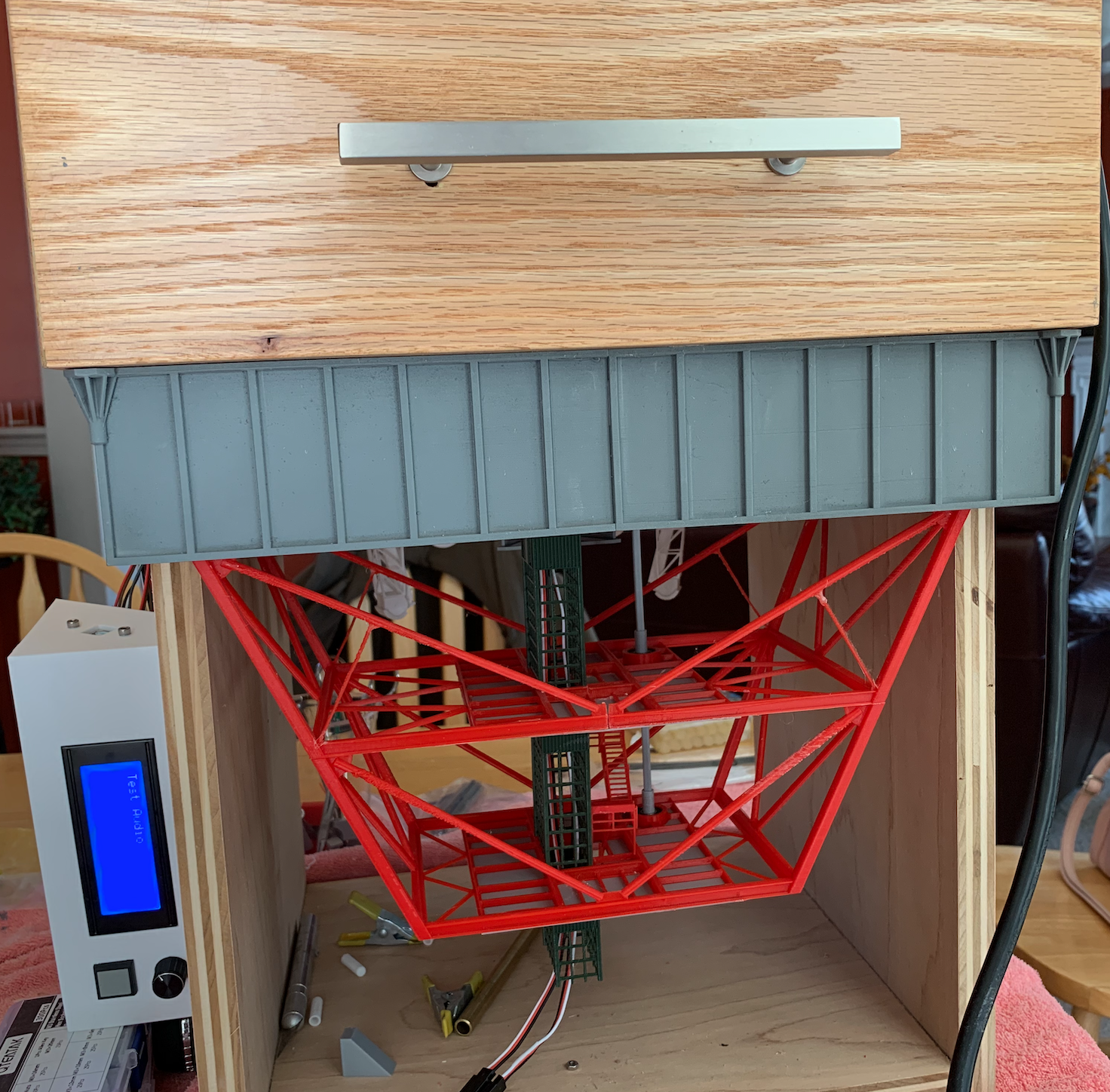
After some progress, a jig was made to get access to install the electronics and the mechanical parts in the base. The control panel is just hanging for now. Note the servo cables that will be threaded all the way to the top for the crew and crane servo motors.
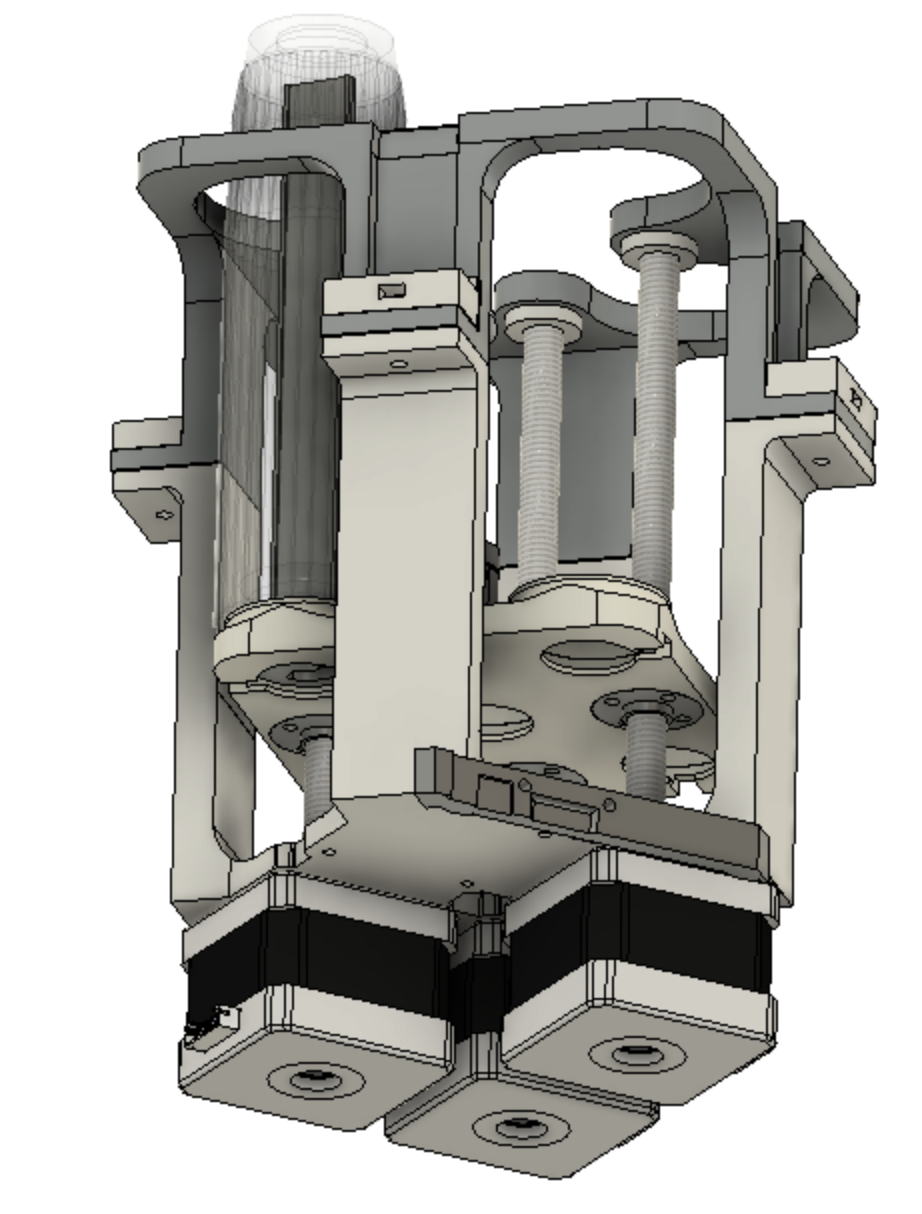
The lifter is three stepper motors with linear actuators. The tripod arrangement makes the base stable and very rigid. The Saturn V sits on five 'flame tubes' printed in clear PETG with strings of NeoPixels on the inside. Not visible here: the Saturn V is secured with a copper tube was embedded in the Lego model (between the center engine and the two rear engines )vwith the end that sticks out sliding into another tube that is fixed to the lifter.
A first test of the lifter
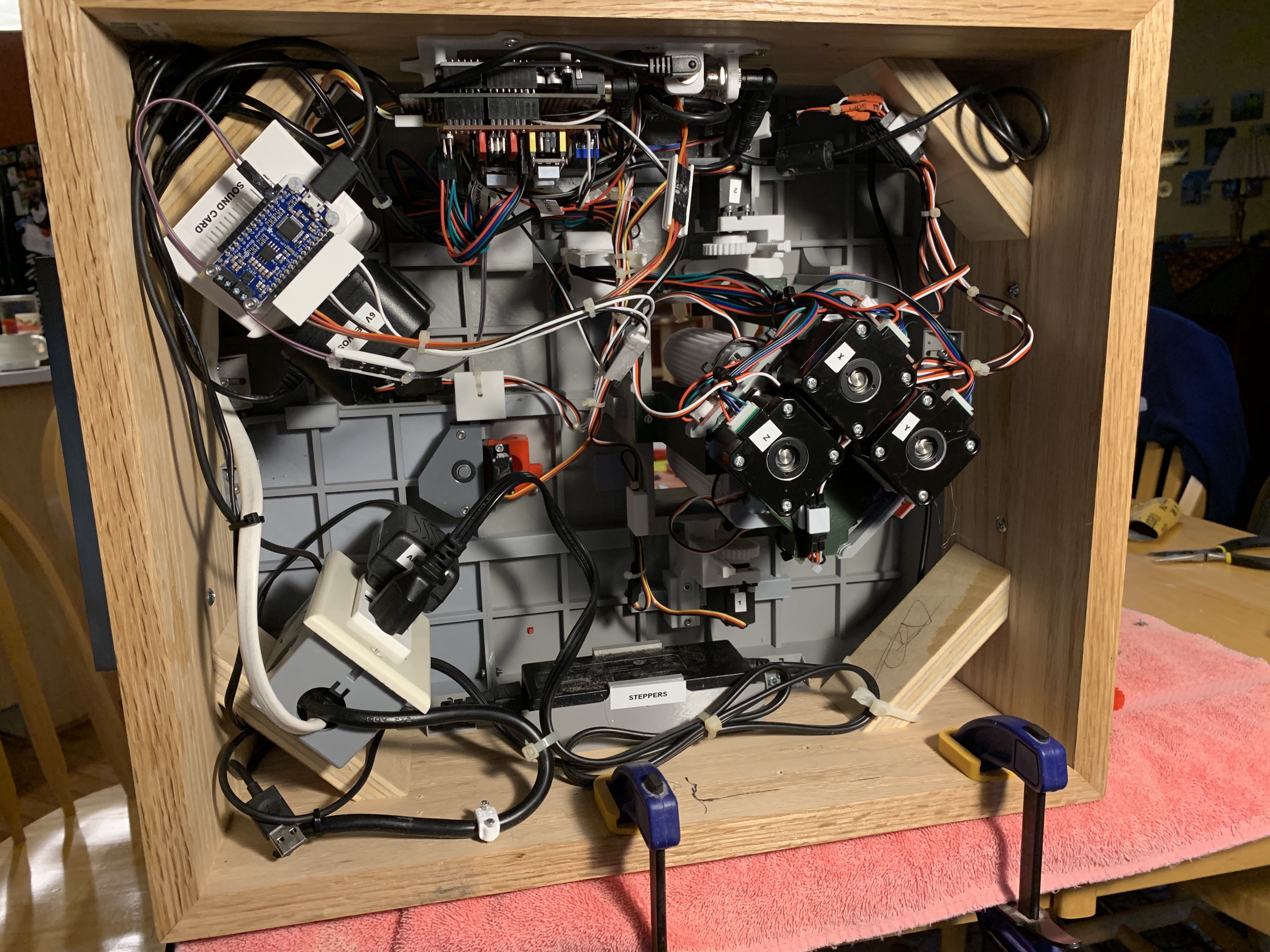
A jump in time.... the lifter with its three nema-17 stepper motors has been installed. Limit switches limit the travel of the lifter. The servos on each side of the lifter move the service arms up and down. The servo near center with the red frame turns the rod that extends thru the structure to swing the gantry arms back and forth. Also seen at top center is an Arduino Uno with a stepper motor controller hat. Top left is a audio board from Adafruit.
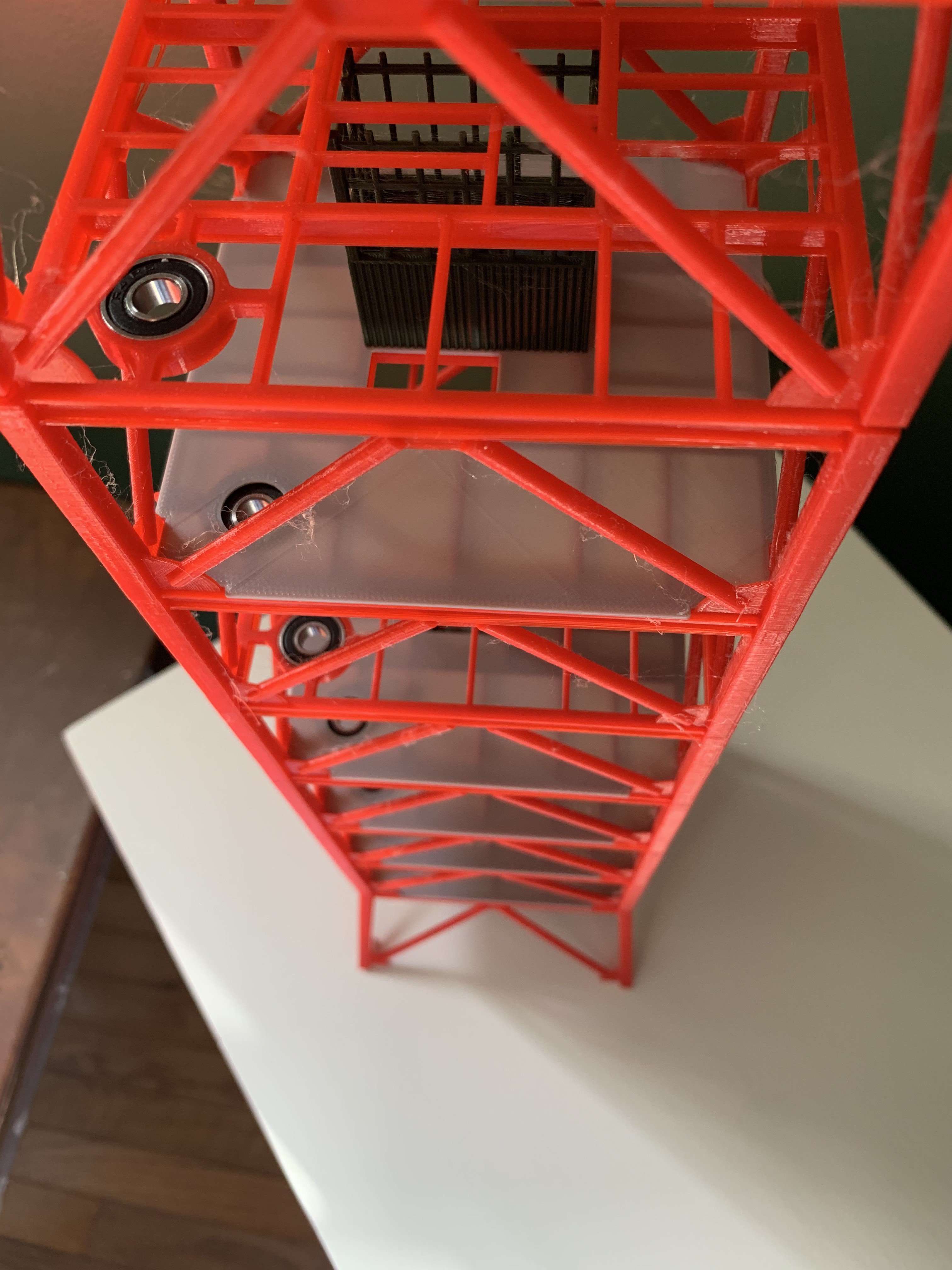
Note the bearing installed in each floor for smooth action of the gantry control rod.
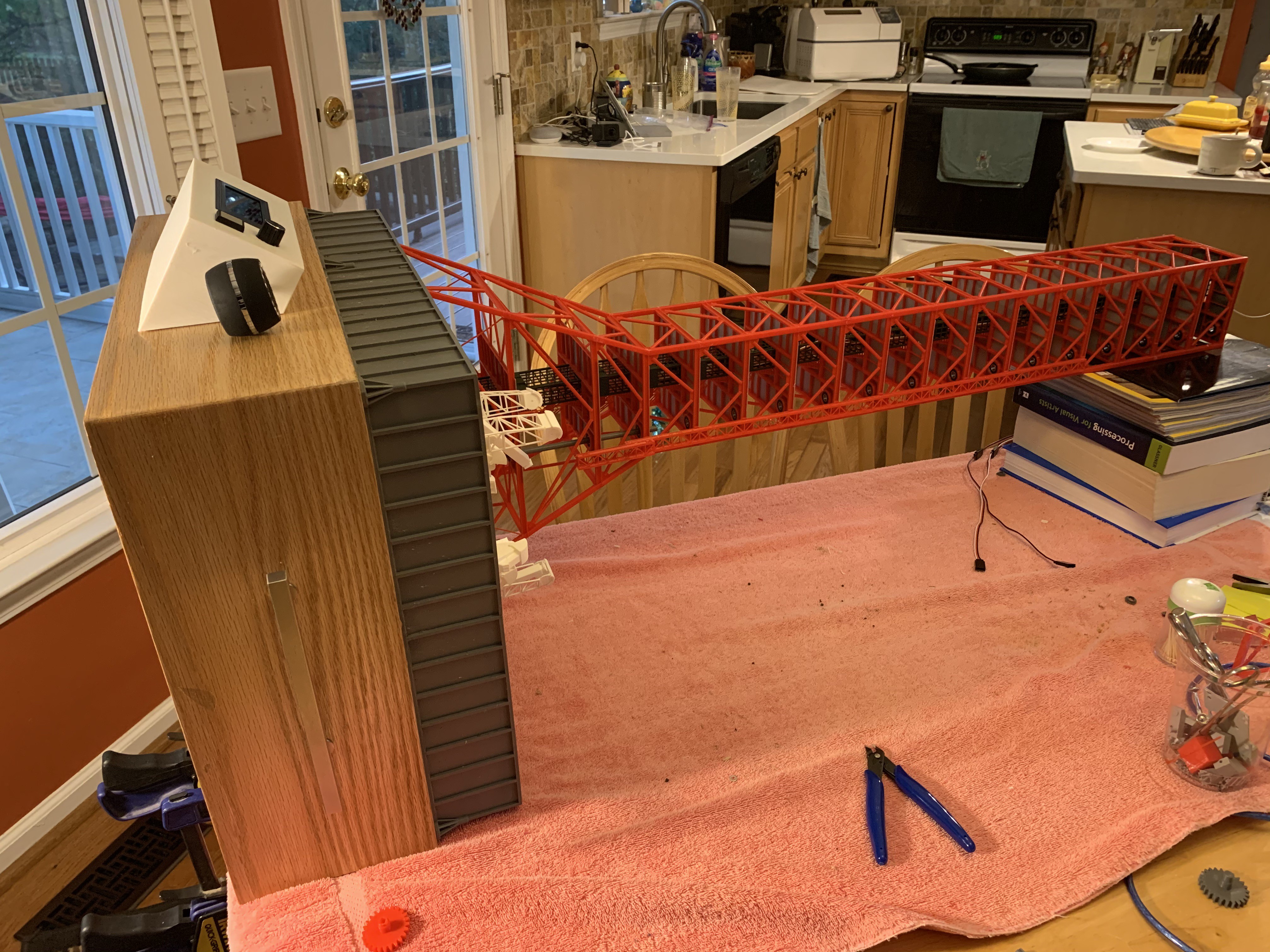
Quite a ways into the project, I decided that the gantry control rod was not going to work as designed, so it was cut out for a replacement with different gearing. At this point the project was getting unwieldy, but it was not hard to lay it over for access.

Detail of the final gantry movement linkage.

Control panel. Rotary switch to select options to do a full launch/abort, or to test each subsystem. Speaker on the right for the Apollo 11 count down audio.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.