 Robin Fröjd
Robin FröjdSo for revision two on the lower legs I adding a smoother foot transition. The transition and the design itself is inspired by BD Spot.
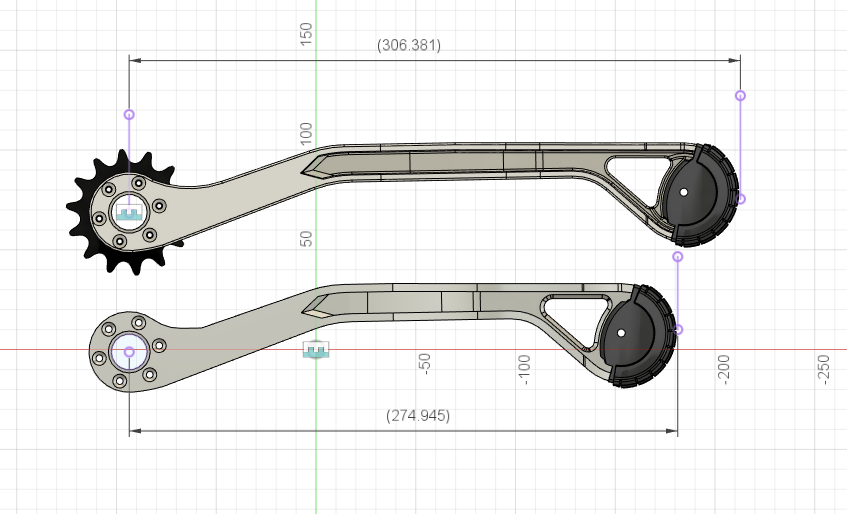
My first design was a bit to long. So next version is 275mm foot included. This also saves a bit of torque.
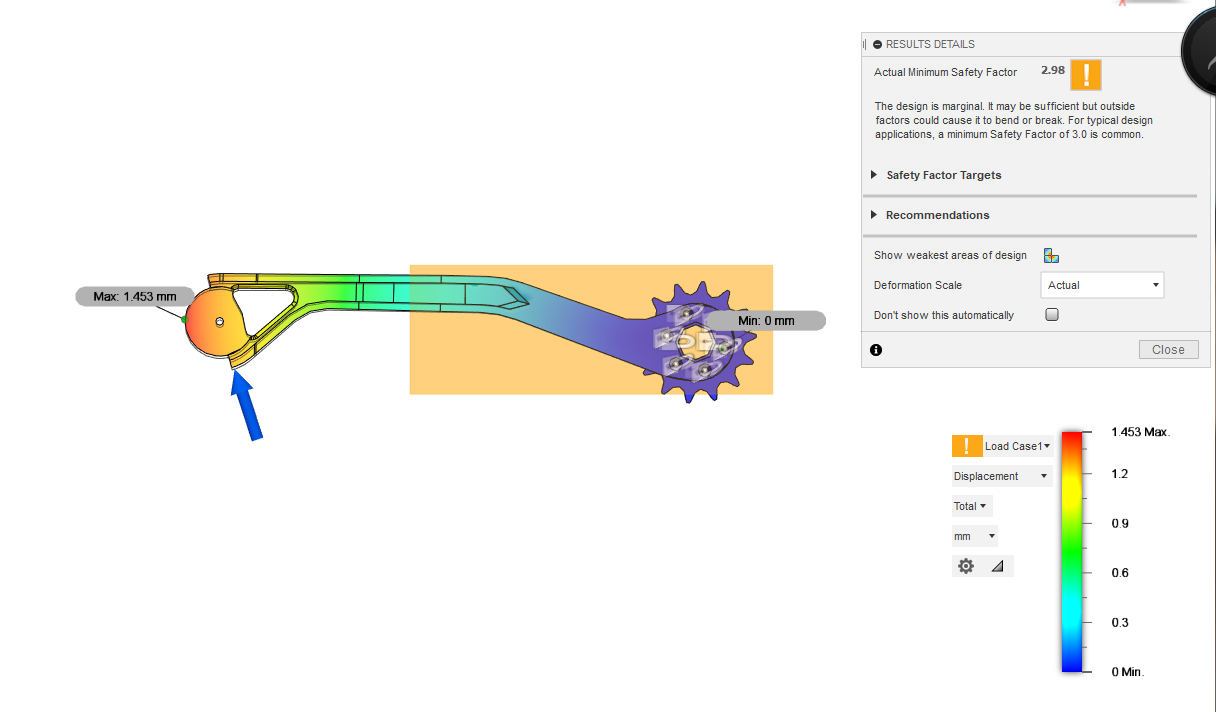
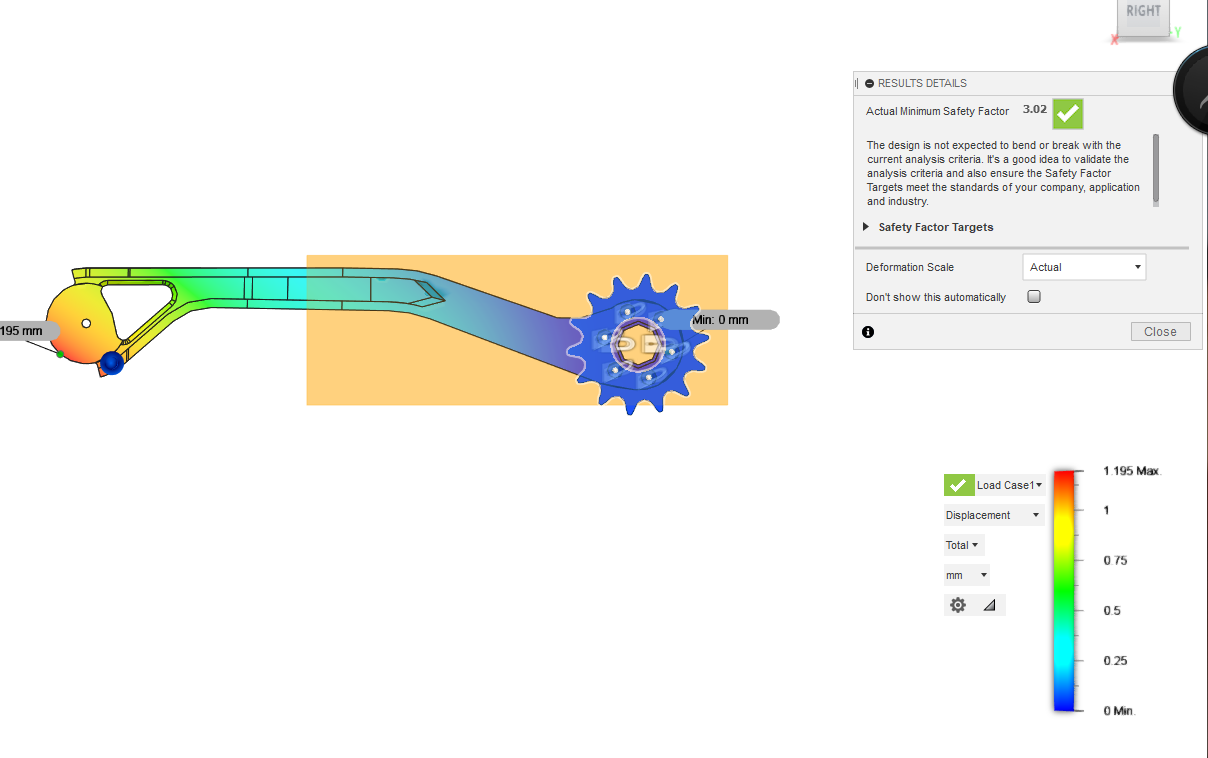
When adjusting the size to ~ 275mm the Strength analysis also looks much better.
First prototype of the legs is all milled in ALU 7075. For second revison I might go down milling in CF. lets see.
Size comparison:
Strength analysis:
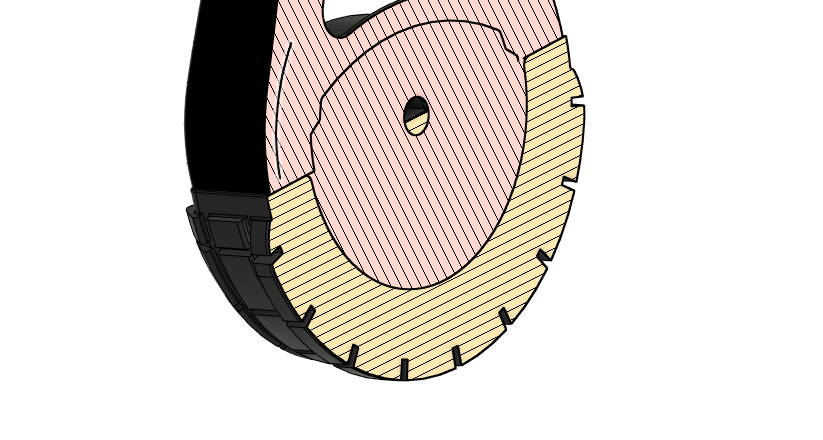
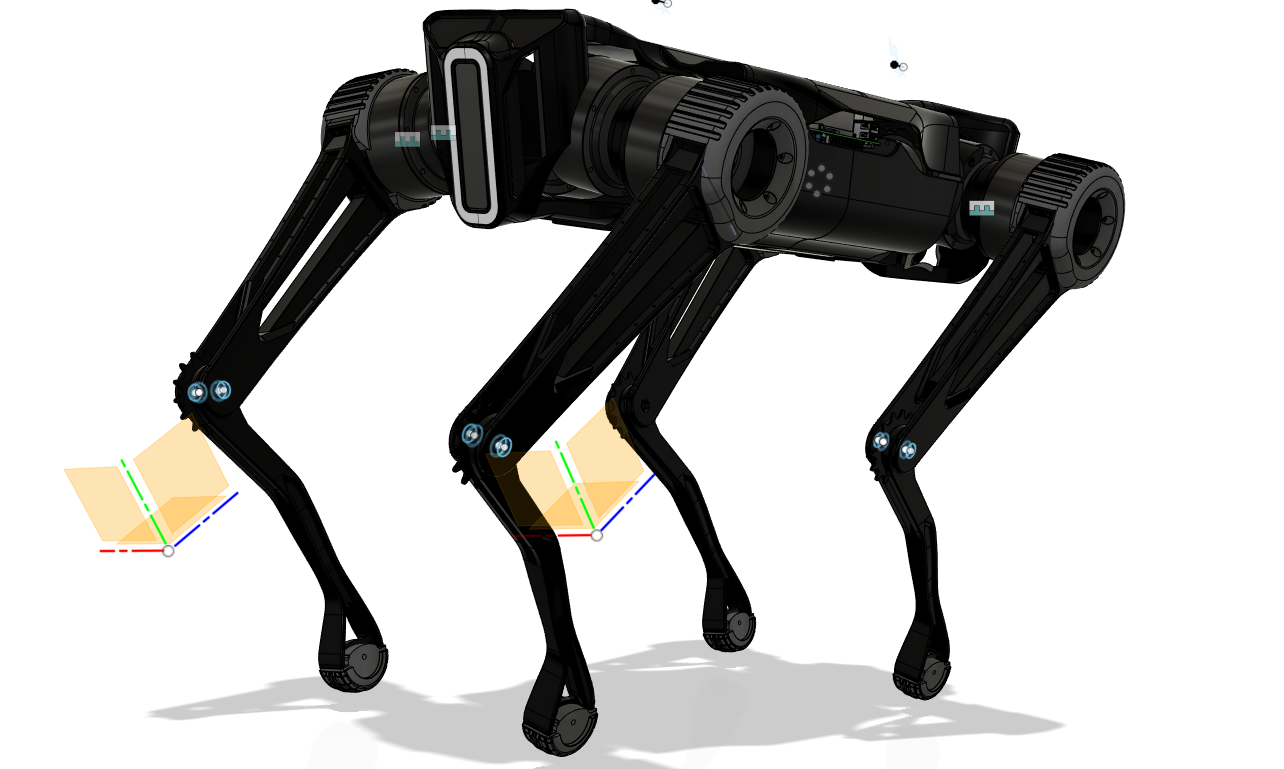
Foot design:
The section view of the foot (not ready yet). It wraps around the low leg and are molded with rubber 60A. We shall see what hardness I end up with.
Design check:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.