 Yohan Hadji
Yohan HadjiSo this is R2Home: a fully autonomous, and flight proven GPS guided recovery system. But how do we get there, and what is important to get a working R2Home?

 The general idea we want to reach.
The general idea we want to reach. Main details :

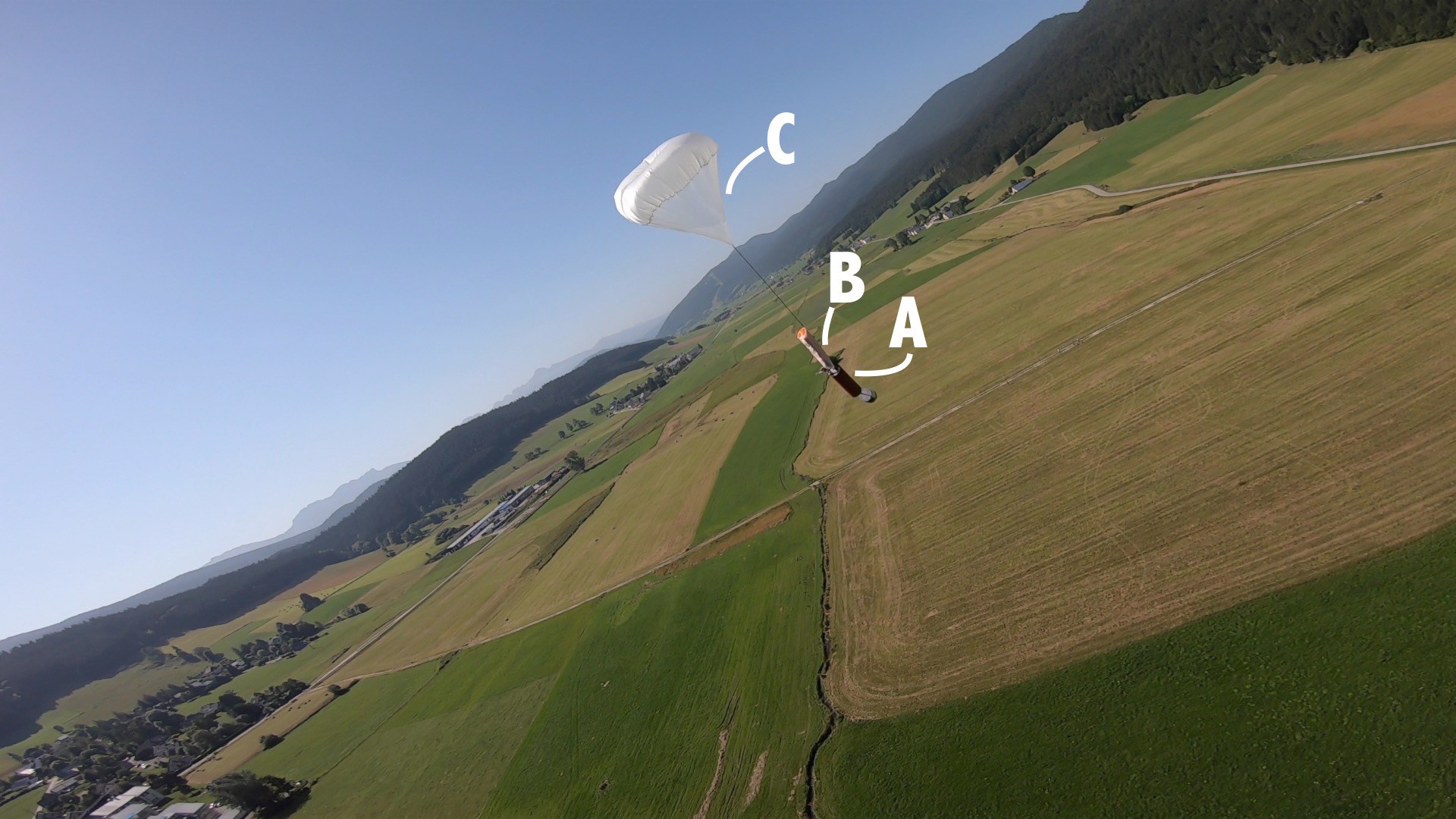
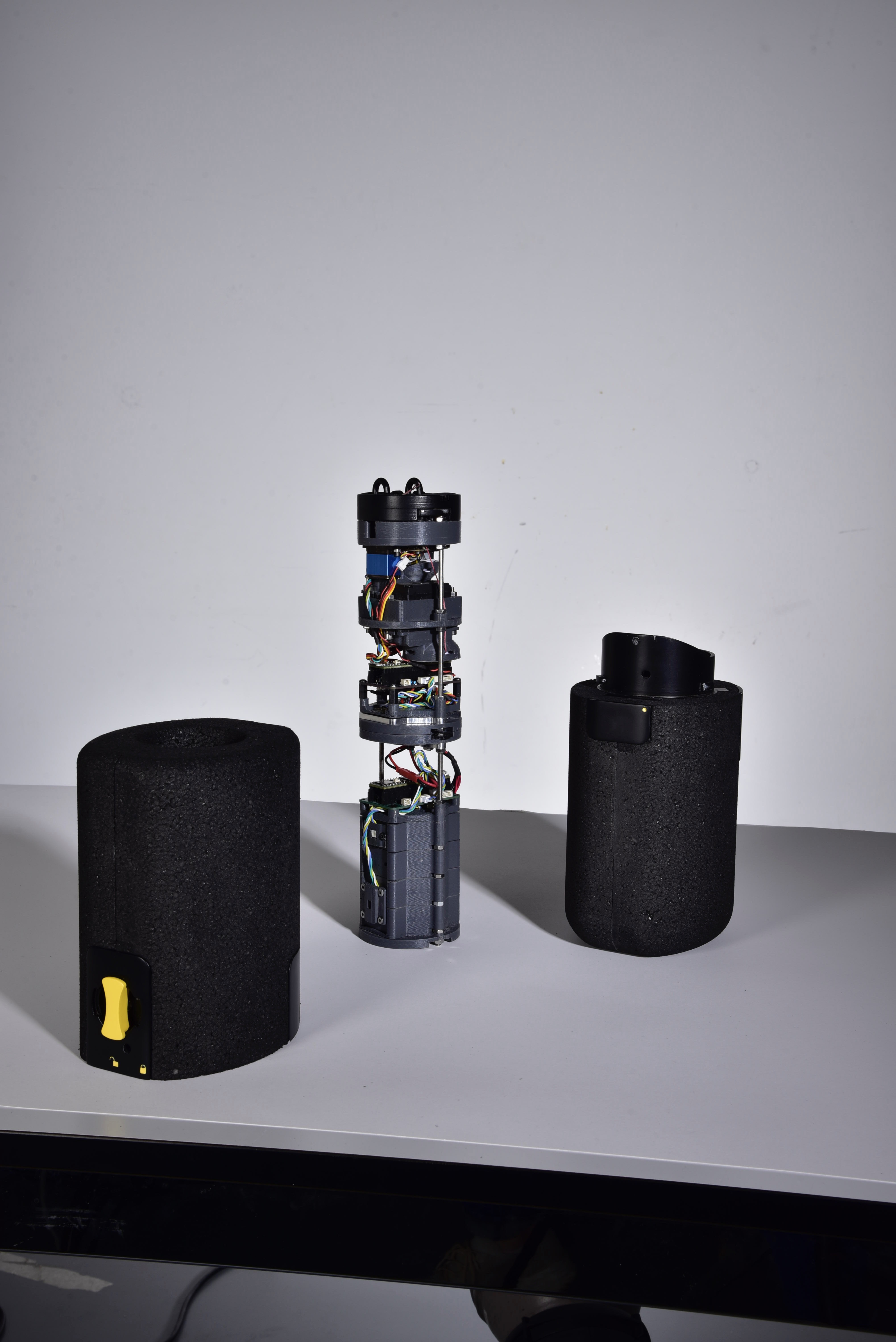
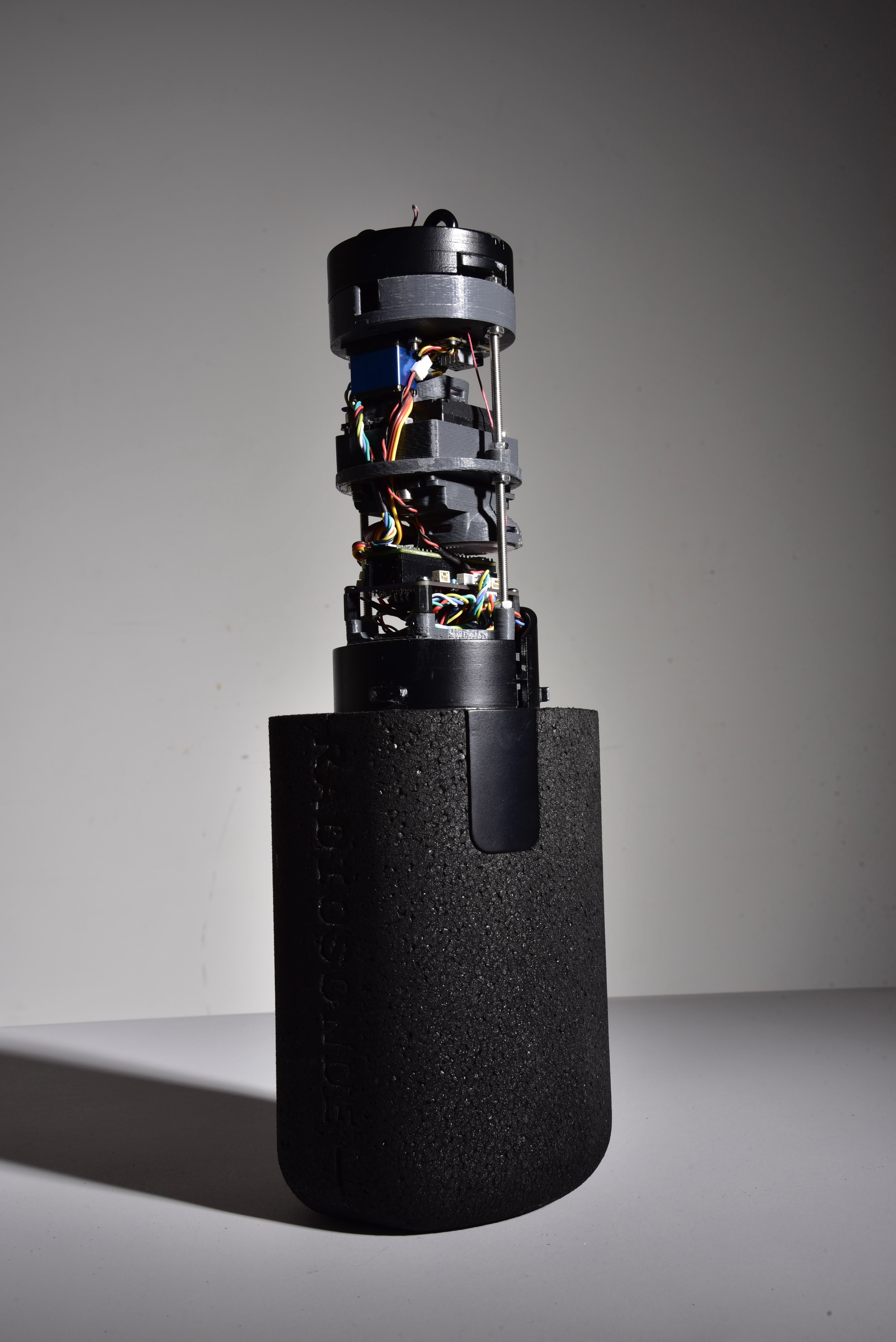
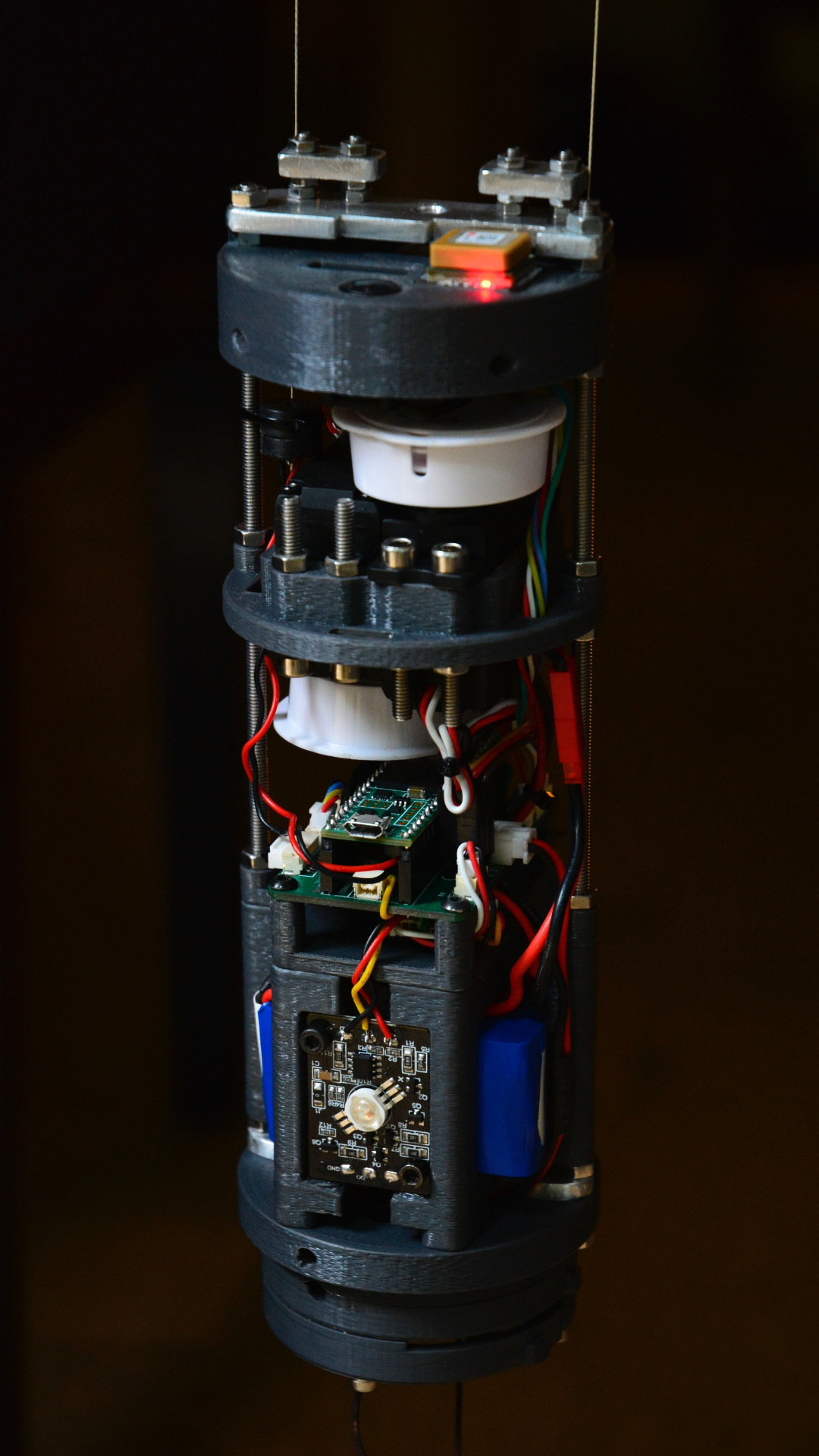
R2Home is composed of few main elements : The tube containing the system (A), the wing in its deployment bag (B), the extraction parachute or "drogchute" (C)
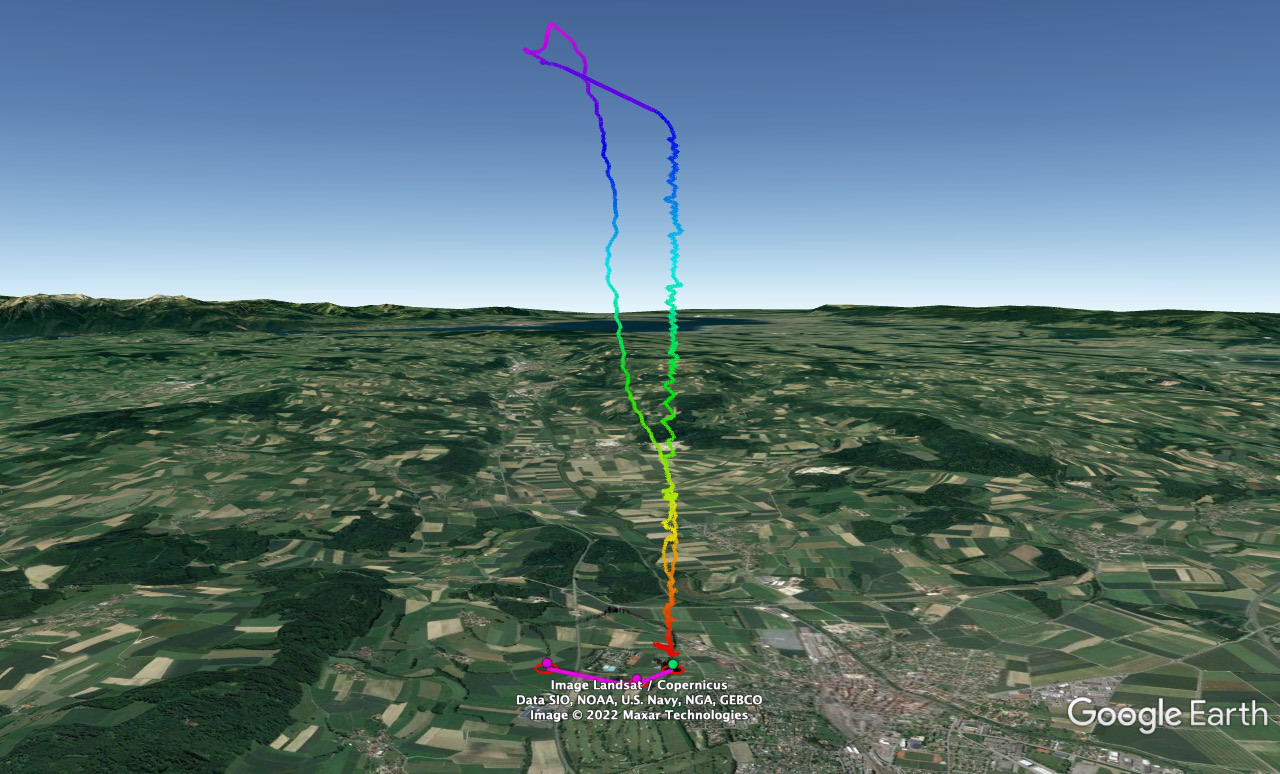
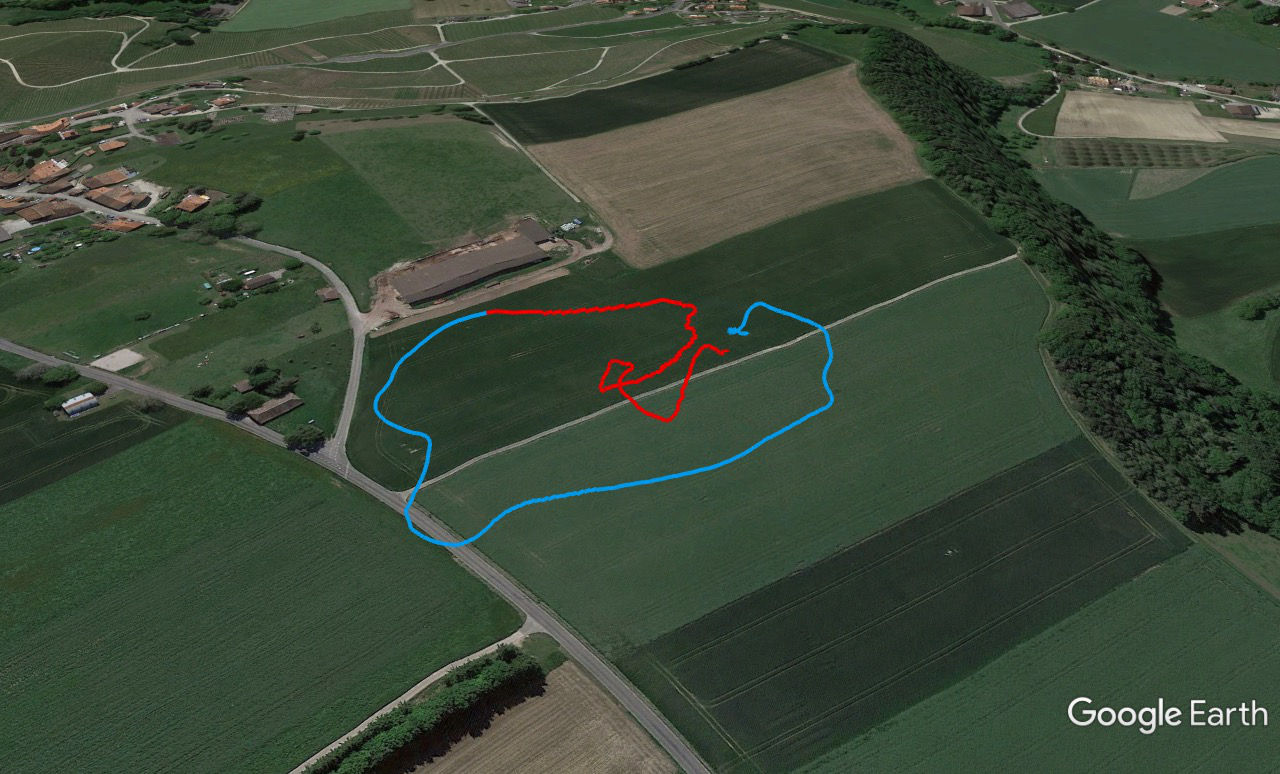
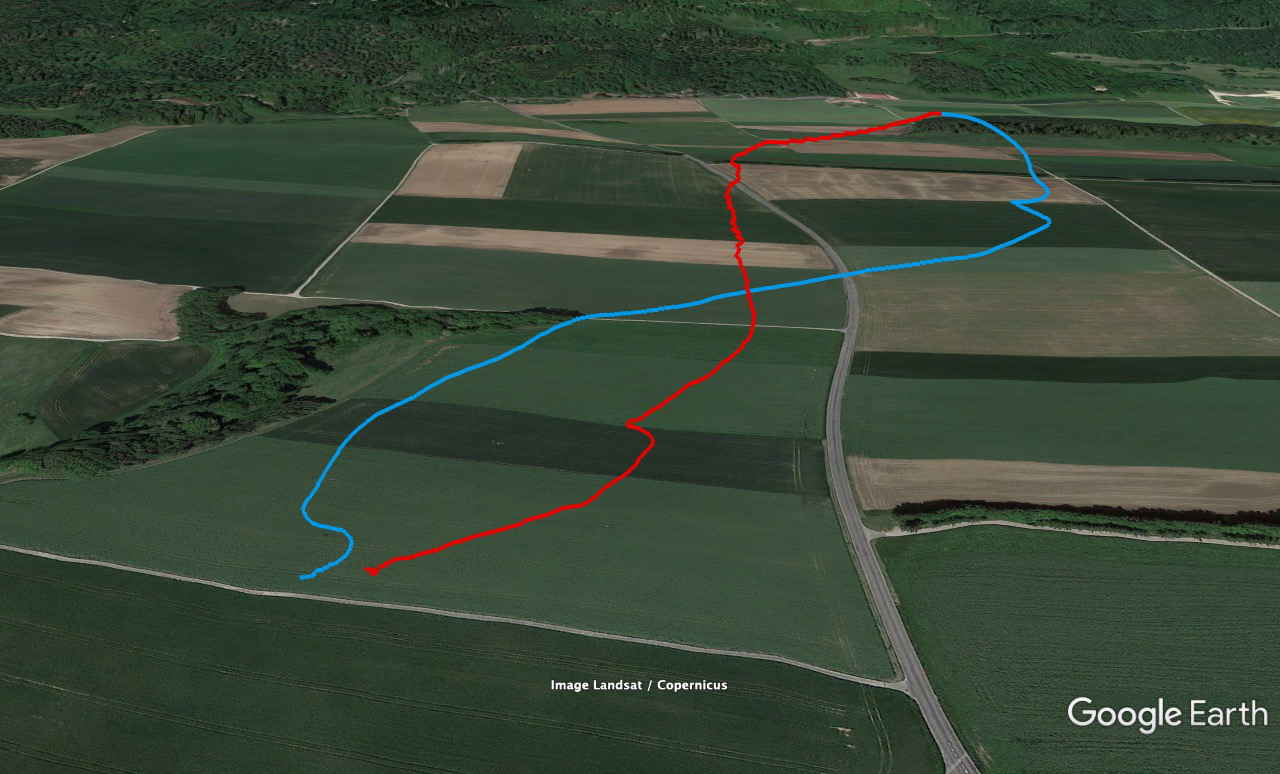
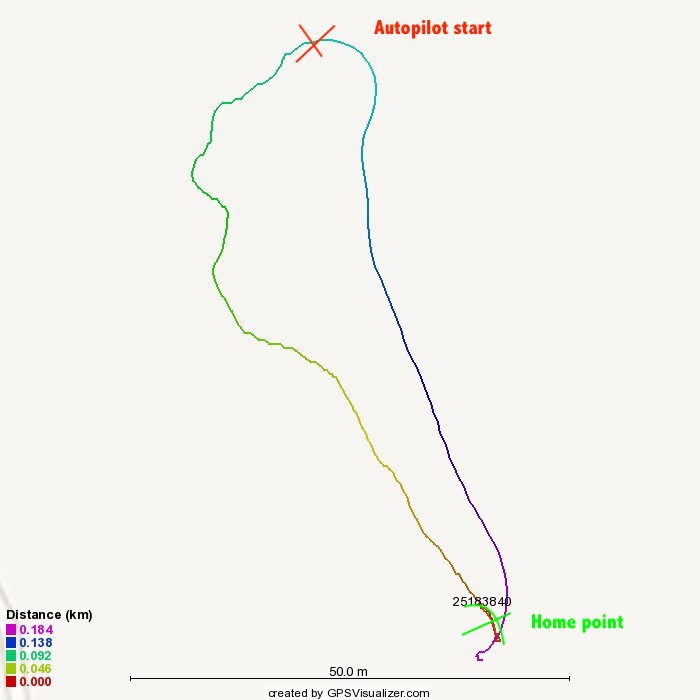
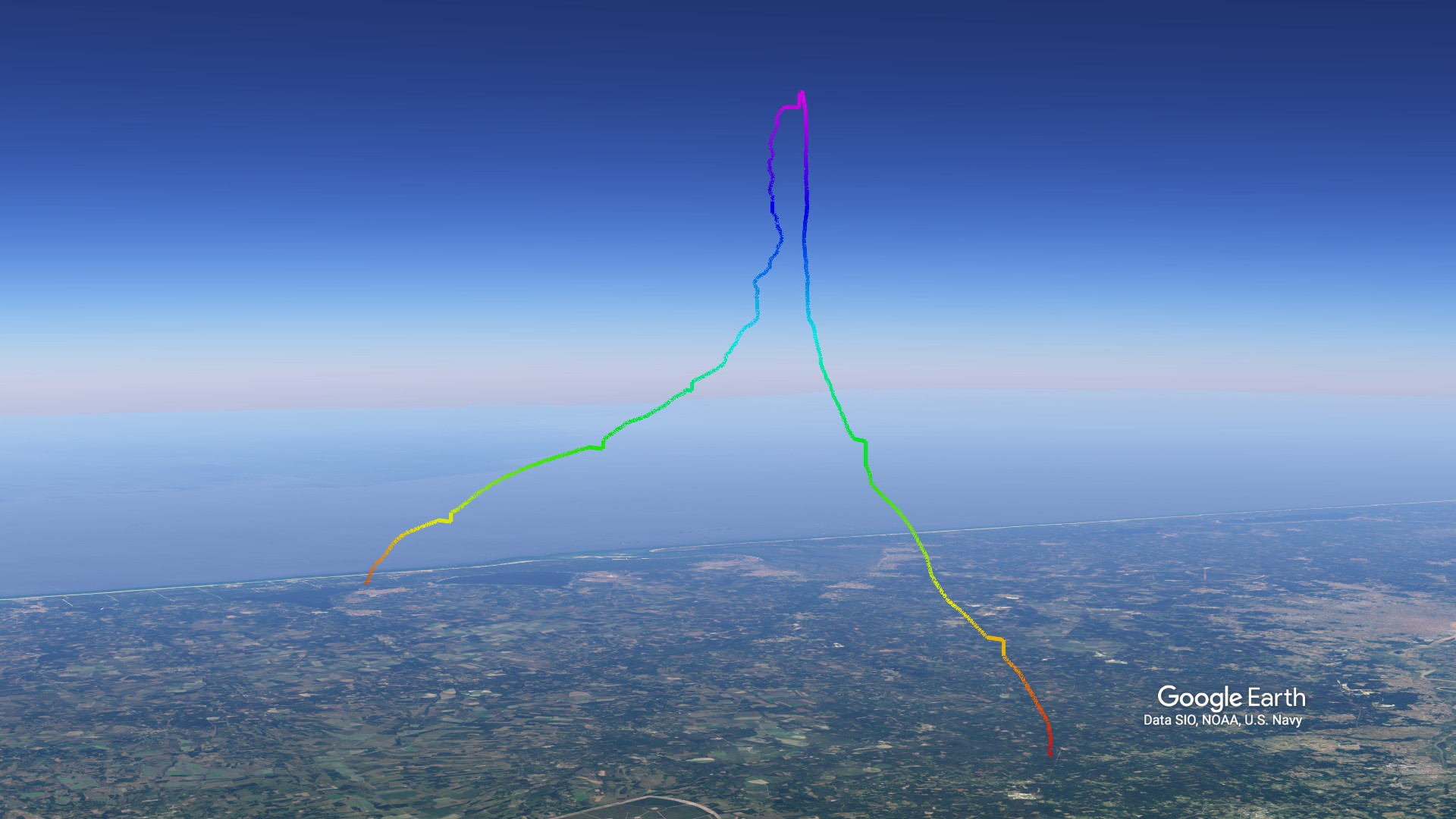
R2Home has two main objectives, the first one is to automatically deploy at the right altitude a parachute or a paraglider canopy. The second is to automatically pilot this canopy to the desired GPS landing point.

A - The deployment of the wing
The canopy is folded in the Dbag following a precise folding pattern to avoid tangles during deployment. Then we need a way to get the canopy out of the Dbag at the right time. The drogchute is used as an extraction force. The deployment mechanism allows to use this force at the right time.

Thus, once the system + drogchute has reached its terminal velocity, i.e. about 7 m/s, the force exerted by the drogchute on the DBag is almost directly the weight of the system. It is interesting that this drogchute is also as big as possible, since it allows in case of non-triggering of the canopy opening, to have a system which is not too dangerous.
However, after the deployment of the canopy, the drogchute remains attached to the canopy, and therefore if it is too big, it will completely prevent the canopy from flying properly. The solution to this problem is to use a "magic" drogchute, which can be both large before deployment, and small afterwards.

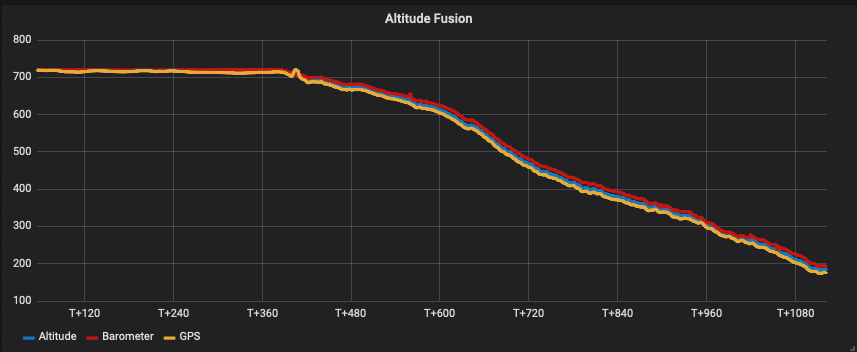
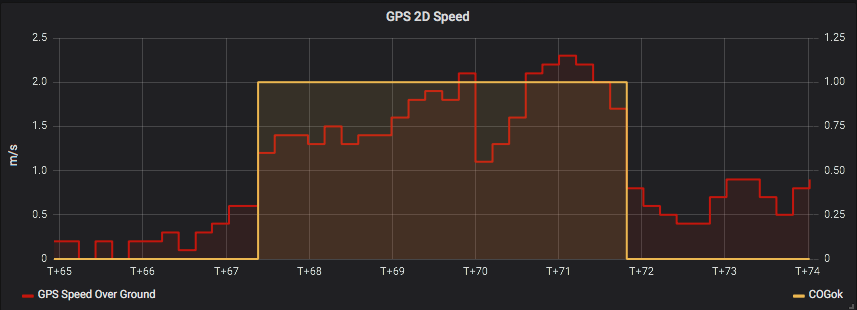
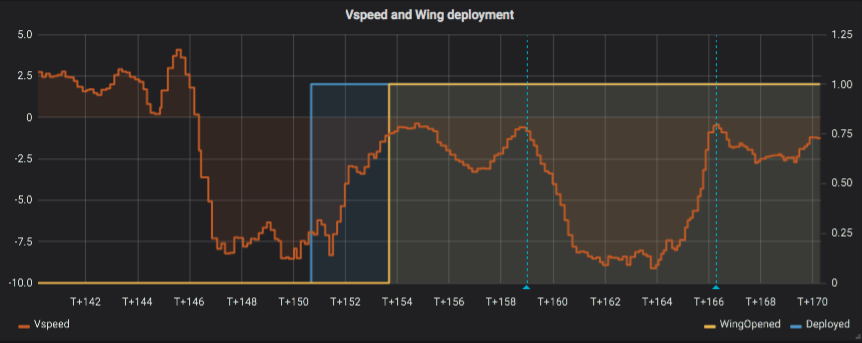
The automatic deployment of the canopy is realized with a condition of vertical speed deduced from the barometer and altitude merged between the GPS and the barometer. For example if we want to deploy the canopy at 100m. We look if the vertical speed is lower than -3m/s and the altitude lower than 100m, and in this case the deployment is triggered
B - The autonomous flight
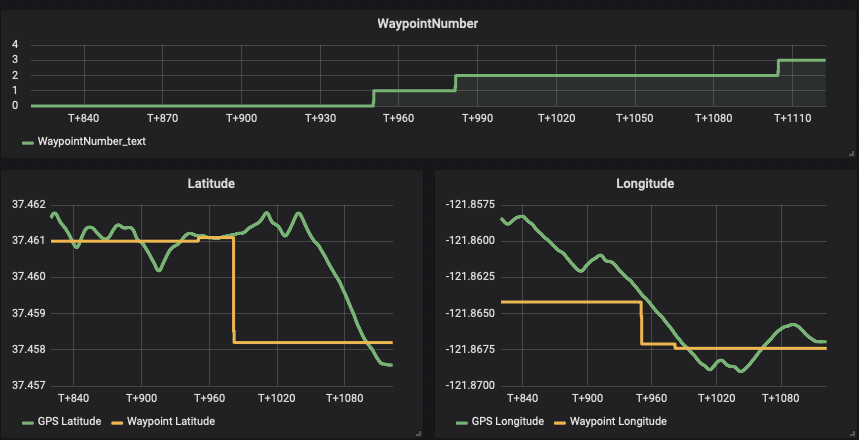
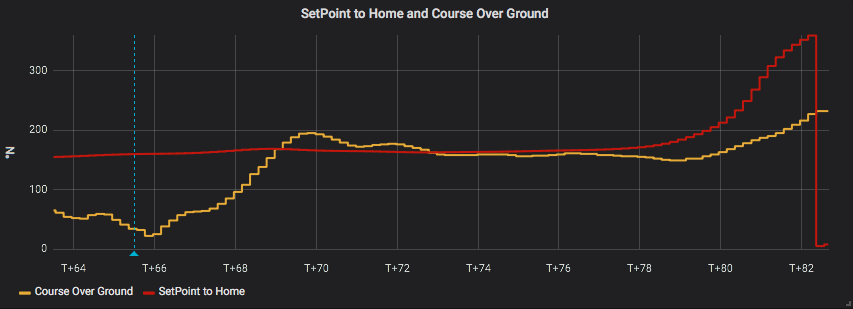
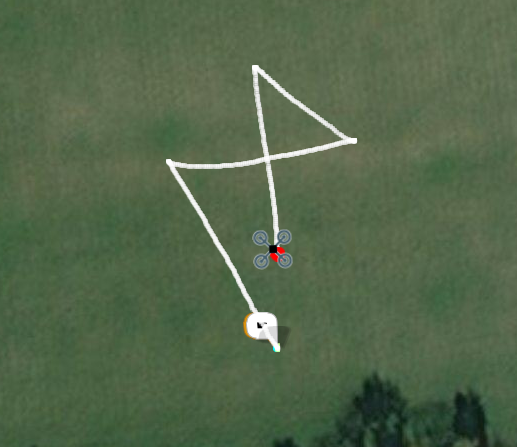
Once the canopy is open, it must now be flown to the desired landing point. The first question is how to steer the canopy?

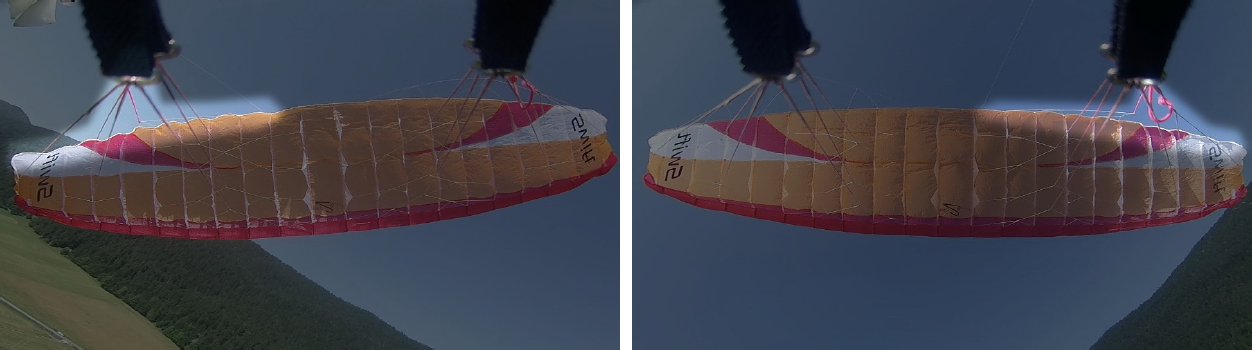
At the beginning of the project, a "square" ram-air parachute canopy (easier to deploy) was used. Now the wing used is a single skin RC paraglider. This second wing type has better flight performances.
Both types of wings are steered the same way, using two control lines, each connected to either the right or left trailing edge of the wing.
When the right control line is pulled, the right side of the canopy is braked, and the canopy turns right. And vice versa for the left line. To turn, you have to pull one line, and release another. In a very precise way, over a distance of about 8cm.

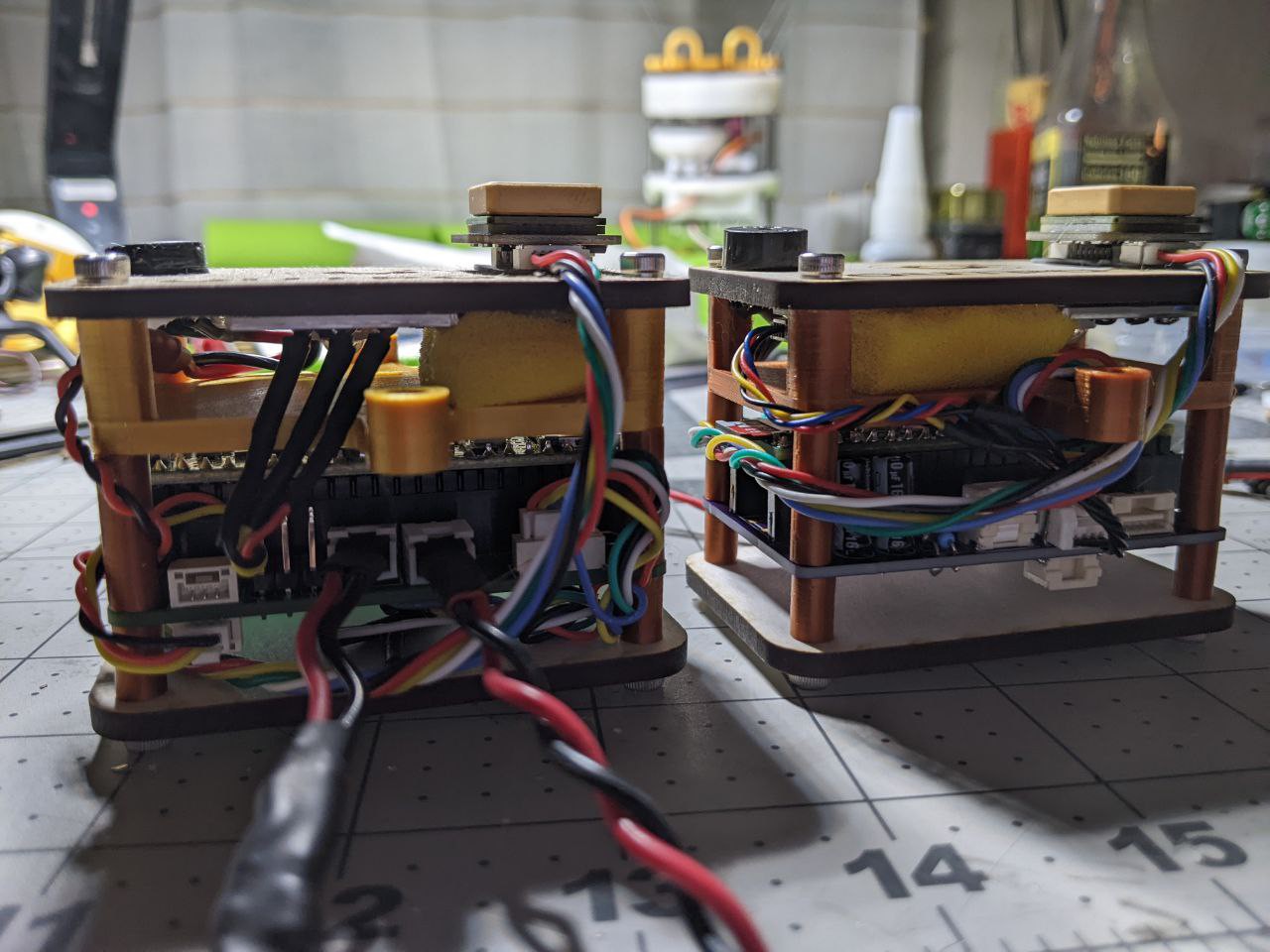
A special, modified servo is used for this purpose
A normal servomotor often has a stroke of between 90° and 180° (110° on average), as they are designed to be used for linear motion, so there is no need to turn more than 180°. However, a movement of ~110° on a spool small enough to fit in the tube volume would only lead to a movement of about 2.5cm.
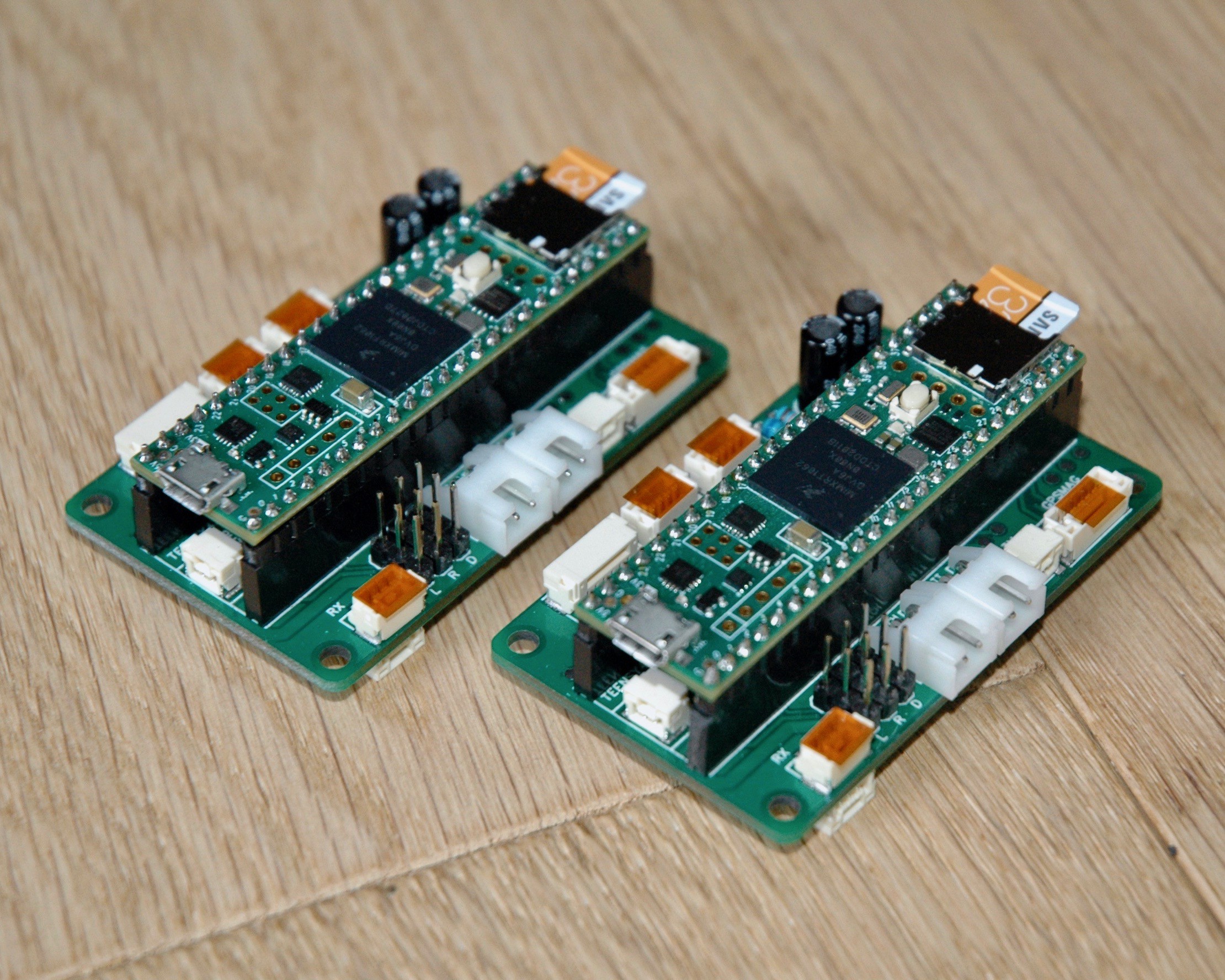
The solution is to use a continuously rotating servo motor with a feedback sensor, which gives us the 360° position. A micro controller has then been integrated inside the servo housing (we see its USB-C plug) to control the rotation speed of the servo to reach the desired position with a PID controller. Thus it is possible to control this servo motor like a normal servo motor, but on 360° instead of lest than 120°. It is therefore possible to pull a line over 8cm.
A 3D printed part is then used as a drum for the spool, to prevent the thread from getting out of the spool.
...
Read more »





























 Josh Cole
Josh Cole
 Walker Eric
Walker Eric

 J. M. Hopkins
J. M. Hopkins
Amazing project, Yohan! I wanted to ask what the maximum range you got out of the radio/telemetry module on this project. If this telemetry module was flown on an HAB, how would it perform?