 Jon Mendenhall
Jon MendenhallIn my previous post I mentioned the work-energy theorem, but I made a slight mistake when using it in the calculations... That states that the total work done by all forces acting on a body is equal to the change in kinetic energy, but of course that also includes gravity, and I forgot to add that into the calculation at the end to show the average power figure.
Now I use the work-energy theorem to find the work done by the motors counteracting gravity to push the center of mass upward, and also the instantaneous power at each step of the simulation.
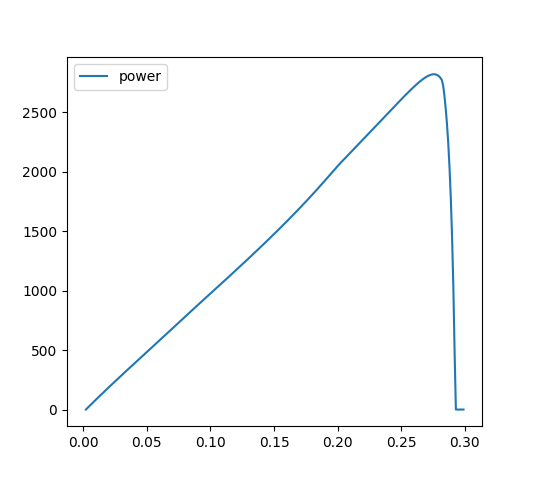
The following graph shows the power generated by the motors at each point in time during the jump in the previous video. Peak power is about 2800W, and the average is 1411W...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.