 Johannes
JohannesCurrently I'm fiddeling with Mark 3 of the rotor hardware.
At first I tried to drive elevation with a pulley which is way to wobbly so I scrapped it before even trying it out. I( will never use pulleys again if sub degree precision is needed.)
My second approach to elevation control was with a linear motor from a hospital bed. It looks promising.
It was then when I realized that it is a bad idea to rotate everything on a big wooden wheel on cheap wheels for azimuth control (this can be seen on the first image in the gallery) so right now I'm building the third Mark.
It will have a fixed bottom frame, azimuth rotation around a low friction ball bearing and elevation is rotated around another set of ball bearings mounted in a new steel frame.
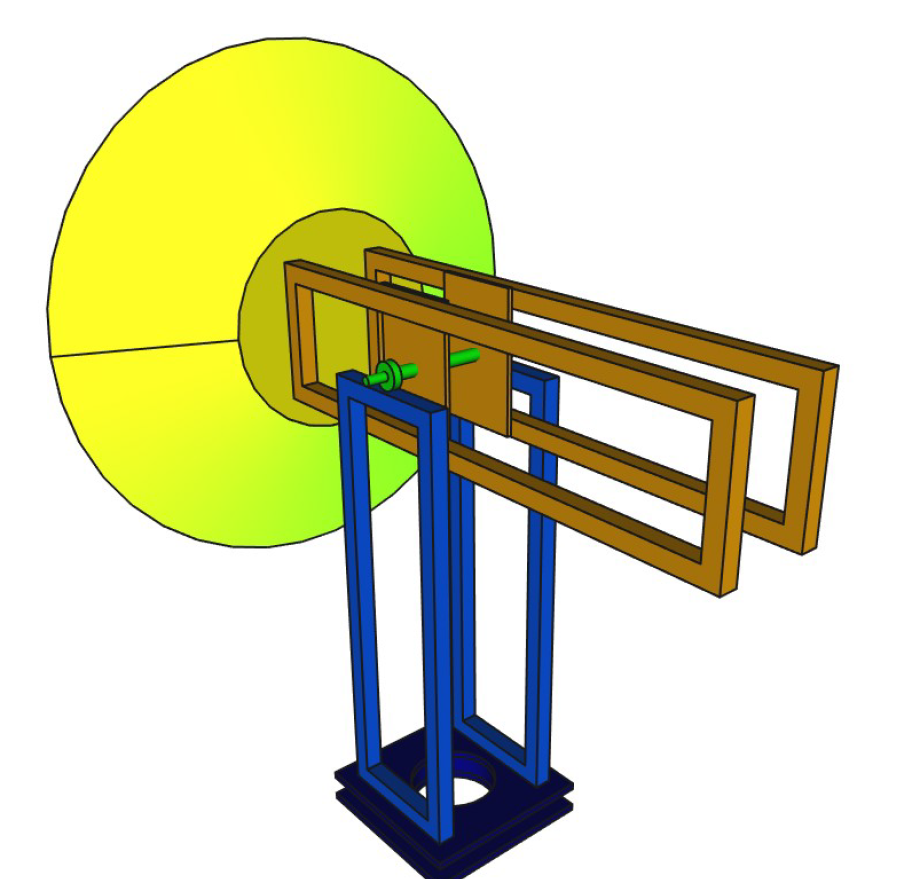
This is a sketch for Mark 3, most of these parts are ready for assembly.
Once again, more photos will follow soon.
A minor update:
I tried to 3D print gears for el/az control. This turned out very bad, maybe because my 3D printing skills are too low or this process is just not right for this high torque, low speed, high accuracy application.
So.. now I'll order some solid metal gears (pun intended).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.