0%
0%
P43D - Ping Pong Pixel Painter
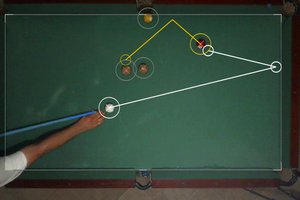
Track the size and angle of a lighted ping pong ball and use this to draw in 3D virtual space.
 Daren Schwenke
Daren SchwenkeBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 alex
alex
 Ted Yapo
Ted Yapo

 FabLab München
FabLab München