 Jake R.
Jake R.Content taken from a IPython Notebook. Will try and host on Github.
%matplotlib inline
import matplotlib
import numpy as np
import matplotlib.pyplot as plt
Filter Simulation in Python
The following covers the design and simulation of a filter in python. This code will provide us with the base for running verification in the future.
Overview
The following is mostly a glossing over of the design process for digital filters. I’m not trying to make this into a filter design how-to, but there are a few things I need to admit up front.
- The filter is designed based on a Hamming window.
- There is no attempt to adjust for added gain
If there is an interest, I can share my process of digital filter design.
Implementation
# Low pass filter with a cutoff frequency of 0.1*sample frequency
coeff = [0, 1, 7, 16, 24, 24, 16, 7, 1, 0] # There are larges gains in using this filter
# We will ignore this for now
# Create a chirp to test with
phi = 0
f0 = 5000.0 # base frequency
f_s = 44100.0 # sample rate (audio rate)
delta = 2 * 3.14 * f0 / f_s
f_delta = 5000 / (f_s * .01) # change in frequency of 5KHz
s_size = f_s * .01
x = []
for y in range(int(s_size)):
x.append(np.sin(phi))
phi = phi + delta
f0 += f_delta
delta = 2 * 3.14 * f0 / fs
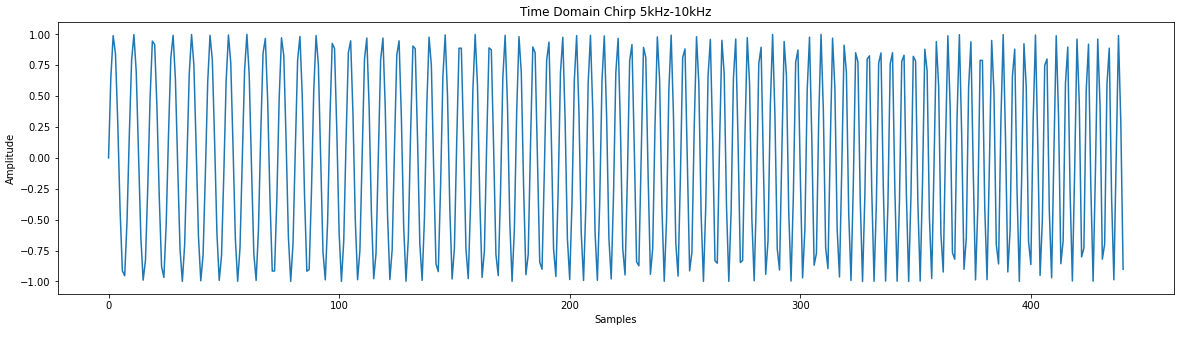
plt.plot(x)
plt.title("Time Domain Chirp 5kHz-10kHz")
plt.xlabel("Samples")
plt.ylabel("Amplitude")
# You might notice the jagged amplitude of the signal. Its aliasing and it sucks.
# Credit for the easy FFT setup
# https://gist.github.com/jedludlow/3919130
fft_x = np.fft.fft(x)
n = len(fft_x)
freq = np.fft.fftfreq(n, 1/f_s)
half_n = np.ceil(n/2.0)
print(half_n)
fft_x_half = (2.0 / n) * fft_x[:int(half_n)]
freq_half = freq[:int(half_n)]
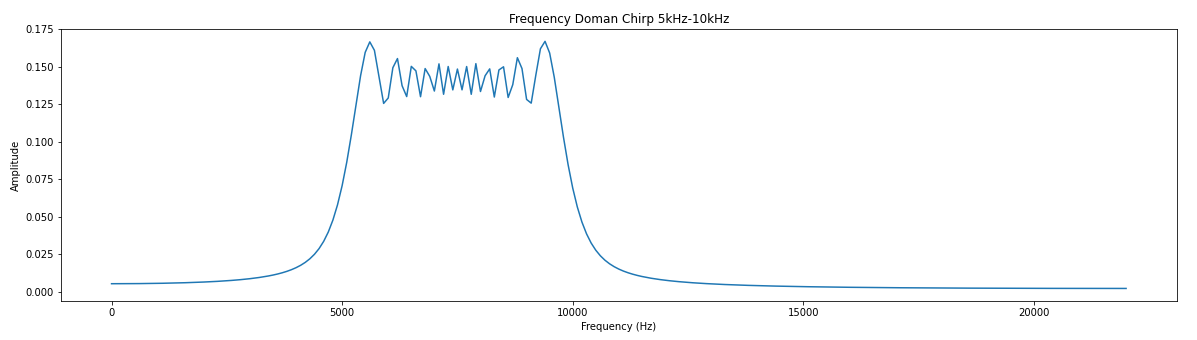
plt.figure(figsize=(20,5))
plt.plot(freq_half, np.abs(fft_x_half))
plt.title("Frequency Doman Chirp 5kHz-10kHz")
plt.xlabel("Frequency (Hz)")
plt.ylabel("Amplitude")
# Filter implementation
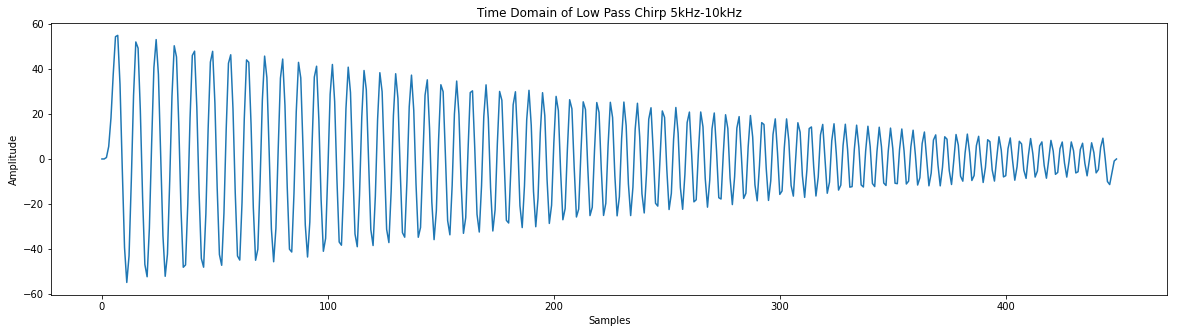
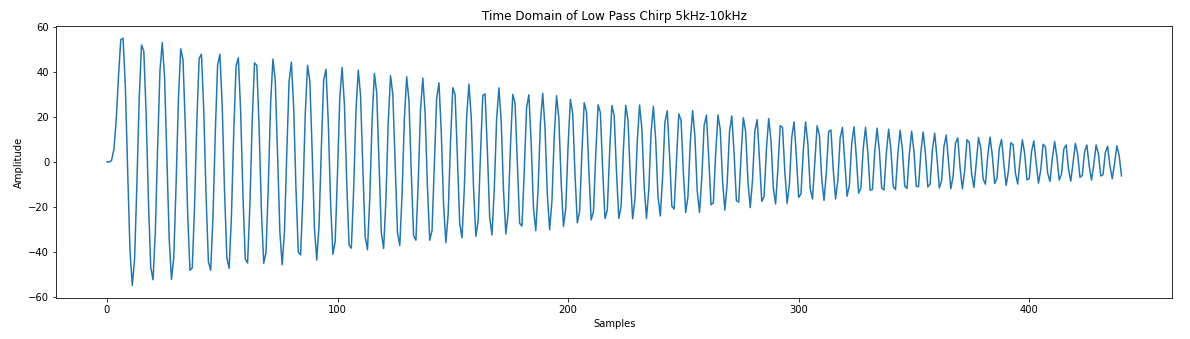
s = np.convolve(x, coeff) # Real easy
plt.plot(s)
plt.title("Time Domain of Low Pass Chirp 5kHz-10kHz")
plt.xlabel("Samples")
plt.ylabel("Amplitude")
# Results of filter look pretty good. Just the amplitude it way up.
# We could throw this through a attenuator (divide) to help.
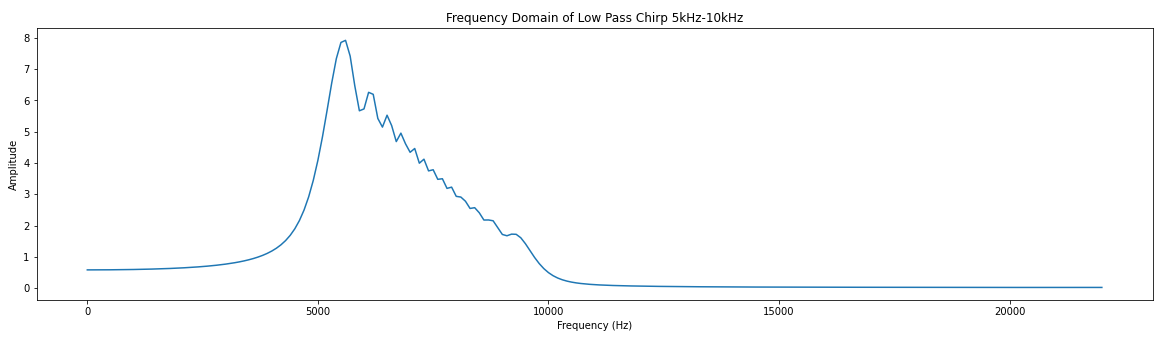
# Results of the FFT
fft_x = np.fft.fft(s)
n = len(fft_x)
freq = np.fft.fftfreq(n, 1/f_s)
half_n = np.ceil(n/2.0)
print(half_n)
fft_x_half = (2.0 / n) * fft_x[:int(half_n)]
freq_half = freq[:int(half_n)]
plt.plot(freq_half, np.abs(fft_x_half))
plt.title("Frequency Domain of Low Pass Chirp 5kHz-10kHz")
plt.xlabel("Frequency (Hz)")
plt.ylabel("Amplitude")
Base Hardware Model
Filter is looking good and we could take these results and test it with our hardware filter later, but lets consider something. While we understand how are filter should perform, we have not yet gained insight to how it should be designed. Lets design a model that shows more of the underlying implementation to help us gain more of an understanding.
class Filter():
""" Simple filter model """
def __init__(self, coeff_list):
self.coeff = coeff_list
self.samples = [0]*len(self.coeff) # Convolution needs a buffer of samples.
# Unfortunately, the filter will start with 0s
def calc(self, sample):
''' Calculate a sample '''
self.samples.append(sample) # Samples are loaded from the end
del self.samples[0]
return sum([x*y for x, y in zip(self.samples, self.coeff)]) # List comprehension for code brevity.
# This is basically what np.convolve does on each sample
low_pass = Filter(coeff)
q = [low_pass.calc(x) for x in x]
plt.plot(q)
plt.title("Time Domain of Low Pass Chirp 5kHz-10kHz")
plt.xlabel("Samples")
plt.ylabel("Amplitude")
[EDIT] Conclusions
[EDIT Notes] Looking back through my notes and the data path and control path are pretty closely designed. If anything, the data path is done first and the controls for the data path are decided on afterwards.
With the base hardware model done, we can start to make some assumptions about what we might need for our control and data path. Such as:
- Computations will take more than one clock cycle and a busy/ready signal would be nice.
- Knowing when the data is valid and invalid
- The ability to load coeff (if wanted) or to hard code the coeff
- Data path will need a multiplier accumulator
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.